

2.2 Прямая линия
В основном линии приема и возбуждения располагаются перпендикулярно по отношению к друг другу. Такое расположение особенно удобно для съемки и сейсмопартий. Очень просто придерживаться нумерации пунктов.
На примере метода Прямая Линия линии приема могут располагаться в направлении восток-запад и линиии приема – север-юг, как это показано на рис. 2.1 или наоборот. Этот метод легок с точки зрения расстилки в поле и может потребовать дополнительного оборудования для расстилки перед отстрелом и при проведении работ. Все источники между соответствующими линиями приема отрабатываются, заплатка приема перемещается на одну линию и процесс повторяется. Часть расстилки 3D показана на верхнем рисунке (а) и, более детально, на нижнем рисунке (б).
Согласно целям Глав 2, 3 и 4 мы сконцентрируемся на этом очень общем методе расстилки. Другие методы описаны в главе 5.
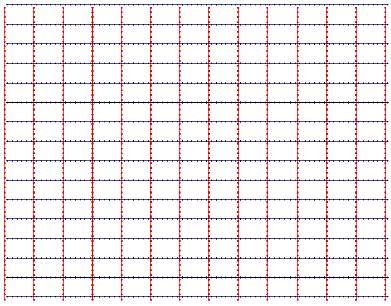
Рис. 2.1a. Проектирование методом Прямая Линия – общий план
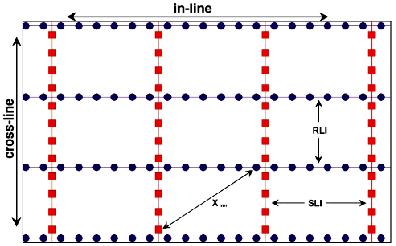
Рис. 2.1b. Проектирование методом Прямая Линия - увеличение
2.3 Кратность
Суммарная кратность – это количество трасс, которые собираются в одну суммарную трассу, т.е. количество средних точек на бин ОСТ. Слово «кратность» может также использоваться в контексте «кратность изображения» или «кратность DMO» или «кратность освещения» (см. «Кратность, зоны Френеля и Построение Изображений» Gijs Vermeer на веб-сайте http://www.worldonline.nl/3dsymsam.) Кратность обычно основывается на намерении получить качественный коэффициент отношения Сигнала к Шуму (S/N). Если кратность двойная, то происходит 41% увеличение S/N (рис. 2.2). Удвоение коэффициента S/N требует учетверенной кратности (предполагая, что шум распределяется согласно случайной функции Гаусса (функции случайного распределения Гаусса). Кратность должна быть определена после изучения предыдущих съемок на территории (2D или 3D), тщательной оценки Xmin и Xmax (Кордсен, 1995), моделирования и при учете того, что DMO и 3D миграция могут эффективно улучшить коэффициент отношения сигнала к шуму.
T. Krey (1987) оговаривает (указывает), что отношение кратности 2D к 3D частично зависит от:
Кратность 3D = кратность 2D * Частота * С
Напр. 20 = 40 * 50 Гц * С
Но 40 = 40 * 100 Гц * С
В качестве эмпирического правила используйте 3D кратность = ½ * 2D кратности
Напр. 3D кратность = ½ * 40 = 20, чтобы получить сопоставимые результаты с качественными данными 2D. В порядке безопасности, кто-либо может принять 2/3 2Д кратности.
Некоторые авторы рекомендуют брать одну треть 2D кратности. Этот более низкий коэффициент дает приемлемые результаты только тогда, когда территория имеет отличный S/N и ожидаются только незначительные проблемы со статикой. Также, 3D миграция будет сосредотачивать энергию лучше, чем 2D миграция, что позволяет снизить кратность.
Более полная формула Крея определяет следующее:
3D кратность = 2D кратность * ((расстояние 3D бина)2 / 2D ОГТ расстояние)* частота* П * 0.401 / скорость
напр. 3D кратность = 30 (302 м2 / 30 м) * 50 Гц * П * 0.4 / 3000 м/сек = 19
3D кратность = 30 (1102 фут2/110 фут) * 50 Гц * П * 0.4 / 10000 фут/сек = 21
Если расстояние между трассами при 2D намного меньше размера бина при 3D, тогда кратность 3D должна быть относительно выше, чтобы достичь сравнимых результатов.
Каково основное уравнение кратности? Имеется много способов рассчитать кратность, но мы всегда возвращаемся к тому основному факту, что один ПВ создает столько средних точек, сколько имеется каналов, регистрирующих данные. Если все выносы находятся в пределах приемлемого диапазона регистрации, тогда можно легко определить кратность, используя следующую формулу:
Кратность = NS * NC * b2 * U
где NS - количество ПВ на единицу площади
NC - количество каналов
B - размер бина (в данном случае бин предполагается в виде квадрата)
U- коэффициент единиц измерения (10–6 для м/км2; 0.03587 * 10-6 для футов/милю2)
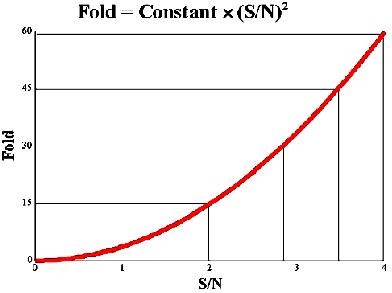
Рис. 2.2 Кратность относительно S/N
Давайте выведем эту формулу:
Число средних точек = ПВ * NC
Плотность ПВ NS = ПВ/объем съемки
Объединяем, чтобы получить следующее
Число средних точек / размер съемки = NS * NC
Объем съемки / Число бинов = размер бина b2
Перемножаем с соответствующим уравнением
Число средних точек / Число бинов = NS * NC * b2
Кратность = NS * NC * b2 * U
Пример:
Допустим, что: NS – 46 ПВ на кв. км (96/кв. милю)
Число каналов NC – 720
Размер бина b – 30 м (110 футов)
Тогда Кратность = 46 * 720 * 30 * 30 м2/км2 * U = 30,000,000 * 10-6 = 30
Или Кратность = 96 * 720 * 110 * 110 футов2/кв.милю * U = 836,352,000 * 0.03587 * 10-6 = 30
Это быстрый путь вычислить, в среднем, адекватную кратность. Для того чтобы определить адекватность кратности более подробным способом, давайте рассмотрим различные компоненты кратности. Преследуя цели последующих примеров, мы допустим, что выбранный размер бина достаточно мал, чтобы удовлетворять критерий аляйсинга.