6.3. Стенд
Стенд сделан на
базе ранее рассмотренного стенда для
снятия динамических характеристик.
Стенд (СКИПП) предназначен для проведения
комплексных испытаний пневматического
привода с поршневым двигателем и
дроссельным распределительным
устройством, например струйная трубка.
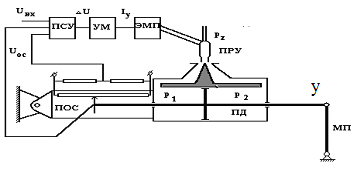
На рис.1 приведена схема привода. Привод
состоит из поршневого пневматического
двигателя (ПД), пневматического
распределительного устройства (ПРУ)
типа струйная трубка. Отклонение струйной
трубки обеспечивается электромеханическим
преобразователем (ЭМП), обмотки управления
которого являются нагрузкой усилителя
мощности (УМ). Привод имеет встроенный
потенциометр обратной связи (ПОС),
напряжение Uос
с которого пропорционально перемещению
поршня. Если привод замкнут обратной
связью по положению Uос
≠0, то
перемещение поршня у
пропорционально входному сигналу Uвх,
у
= f(Uвх).
Если привод разомкнут (Uос
=0),
то скорость перемещения поршня dу/dt
пропорционально входному сигналу ошибки
dу/dt = f(ΔU).
На стенде можно снимать следующие экспериментальные характеристики:
- Δр = f(Iу), зависимость перепада давления Δр = р1 – р1 в полостях ПД от тока Iу в обмотках управления ЭМП;
Δр = f(t,Iу), зависимость перепада давления Δр = р1 – р1 в полостях ПД от тока Iу в обмотках управления ЭМП и времени t;
Iу = f(t,), зависимость тока в обмотках ПРУ от времени t;
- dу/dt= f(Iу), зависимость скорости dу/dt перемещения поршня при отсутствии нагрузки (силы сопротивления на штоке) от тока Iу в обмотках управления ЭМП при разомкнутой обратной связи;
- у = f(Uвх), зависимость перемещения у штока замкнутого по положению привода от входного сигнала Uвх;
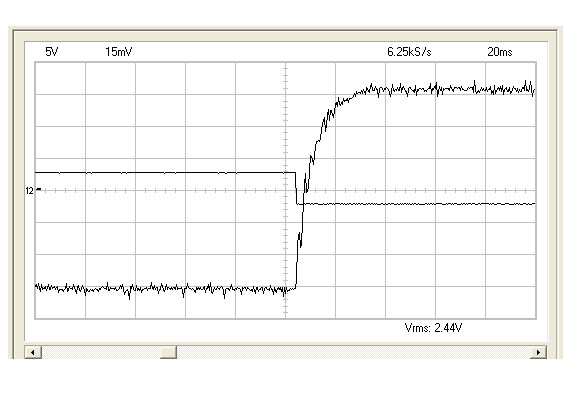
- у = f(Uвх, t), зависимость перемещения у штока замкнутого по положению привода от входного сигнала Uвх и времени t, (реакция замкнутого привода на скачек входного сигнала);
- W(jω) = y(jω)/ΔUвх(jω), логарифмическую частотную характеристику разомкнутого по положению и замкнутого по моменту привода при различных амплитудах сигнала ошибки ΔU (ΔU- сигнал ошибки, у – перемещение штока поршня);
- W(jω) = y(jω)/ΔUвх(jω), логарифмическую частотную характеристику замкнутого по положению привода при различных амплитудах входного сигнала Uвх .
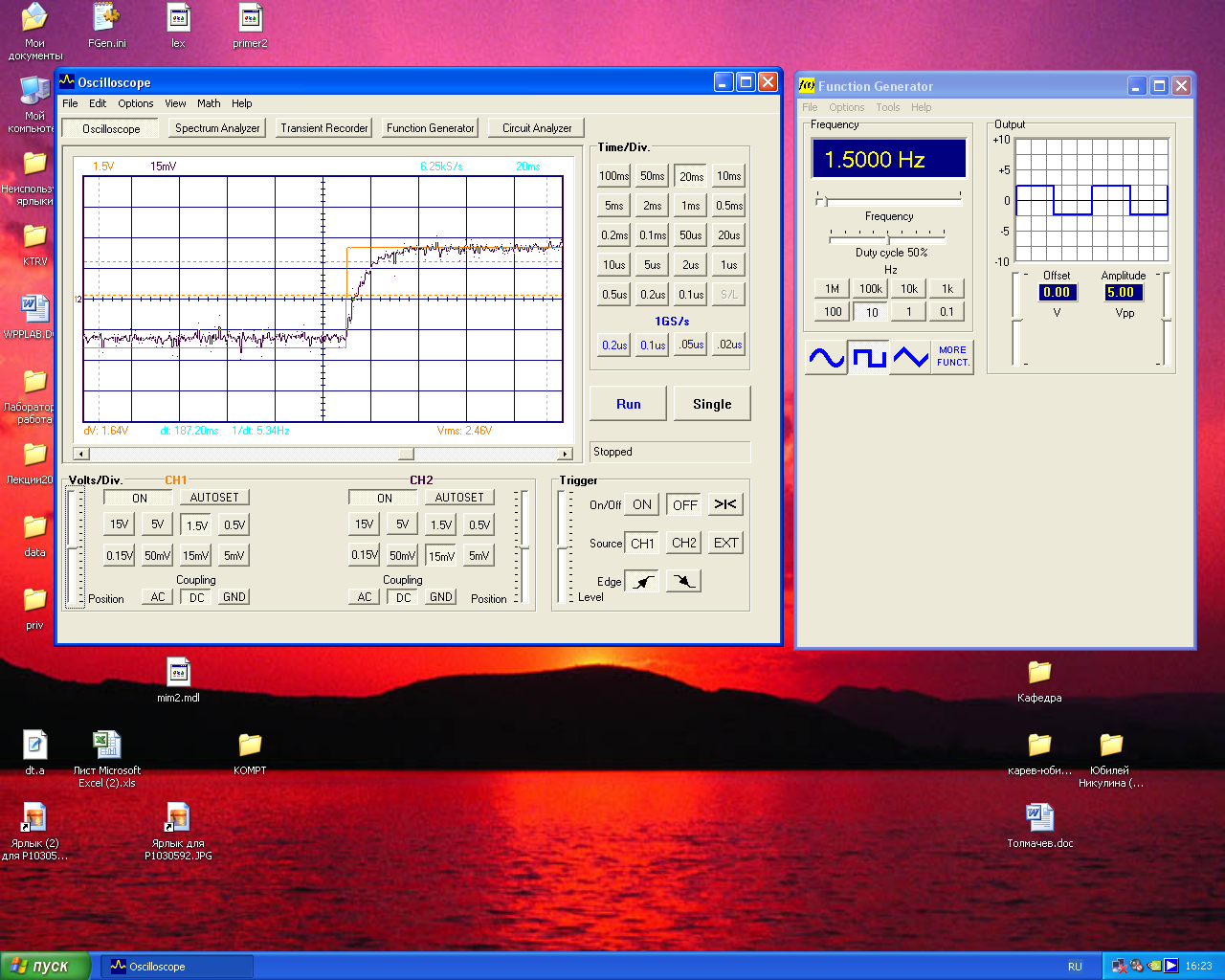
Ниже приводится схема соединения генератора PCG10, осциллографа PCS500 с компьютером (ПК) и испытательным стендом. Следует заметить, что выход генератора и один из входов осциллографа объединяются. Со стенда на вход PCS500 подается напряжение Uвых с датчика перемещения выходного вала привода, а также входное напряжение Uвх.
Результаты испытаний могут быть сохранены в компьютере в виде графиков или таблицы данных.
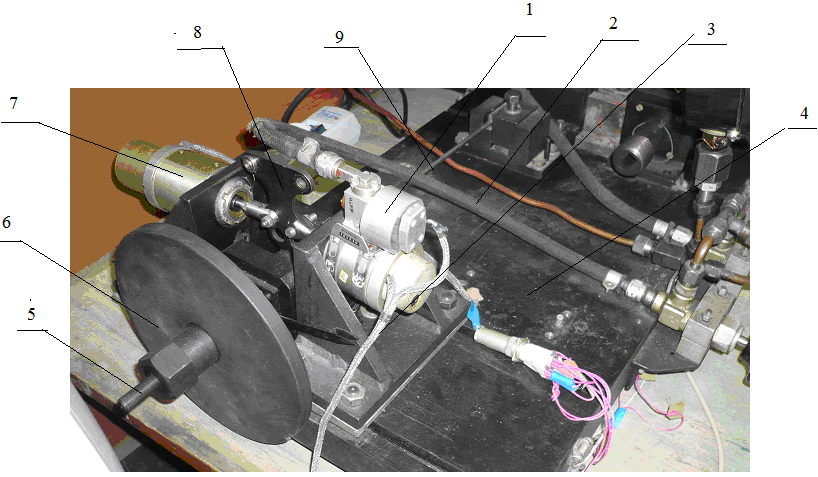
Общий вид испытательного стенда приводится на рис. 3. На рисунке обозначено: 1 – привод, 2 – шланг подачи входного воздуха, 3 – электрический жгут подвода сигналов к приводу, 4 – станина, 5 – вал стенда, 6 – диск имитации момента инерции нагрузки, 7 – пневмодвигатель, потенциометр обратной связи которого используется как датчик положения штока, 8 – рычаг приваренный к валу стенда, 9 - торсион для имитации шарнирного момента. Выходной шток привода присоединяется к рычагу (8) вала стенда. Торсион (9) и диск (6) позволяют имитировать при испытаниях шарнирный и инерционный моменты соответственно. В составе стенда имеется набор торсионов и дисков.
У пневмодвигателя (поз.7) используется встроенный потенциометр обратной связи в качестве датчика перемещения штока поршня. Схема подключения потенциометра (рис.4) показана на рисунке. Схема запитывается от блока электропитания, гальванически развязанного с блоком питания усилителя. Движок потенциометра (залитая стрелка на схеме) связана с валом стенда.
Сопротивление потенциометра Rпот = 200 Ом. Балластные сопротивления Rб = 510 Ом позволяют организовать мостовую схему замера напряжения.
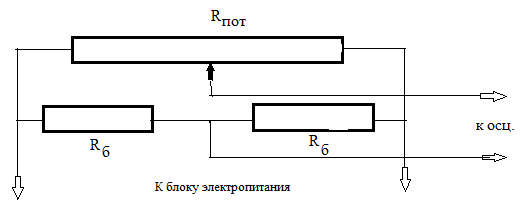
Схема электросоединения потенциометра.
Стенд располагается на лабораторном столе около компьютера, длинна соединительных проводов не более 1 метра.
Для снятия зависимости Δр = f(Iу) между цилиндром и ПРУ необходимо вставить специальную колодку для подсоединения манометров замера давления в полостях силового цилиндра. Можно манометры заменить датчиками давления и получать временные зависимости давлений в полостях ПД.