

4. Синтез регуляторов векторной сар с ориентацией поля.
Векторная САР частотно-регулируемого электропривода строится на основе следующих принципов.
Управление электроприводом осуществляется на основе принципов подчиненного регулирования с последовательной коррекцией и реализуется последовательно подчиненными локальными системами регулирования векторных и скалярных переменных.
Регулирование осуществляется во вращающейся системе координат, связанной с полем ротора.
Выбран вариант архитектуры системы с управляемым скольжением, что исключает установку датчиков потока двигателя.
Регулятор скорости формирует задание на момент двигателя.
С помощью регулятора потокосцепления и момента соответствующие величины преобразуются в заданные значения тока статора и скольжения двигателя.
Локальные системы регулирования тока статора и скольжения осуществляют отработку заданных воздействий. Коэффициент передачи преобразователя равен 1 о.е, т.е. преобразователь описывается усилительным звеном, без учета инерционности. kn=1.
Для компенсации внутренних перекрестных обратных связей вводится блок компенсации, вычисляющий значения ЭДС двигателя. Для вычисления ЭДС использованы заданные координаты системы регулирования (компенсация по заданию).
На выходе регуляторов тока устанавливается блок ограничения
О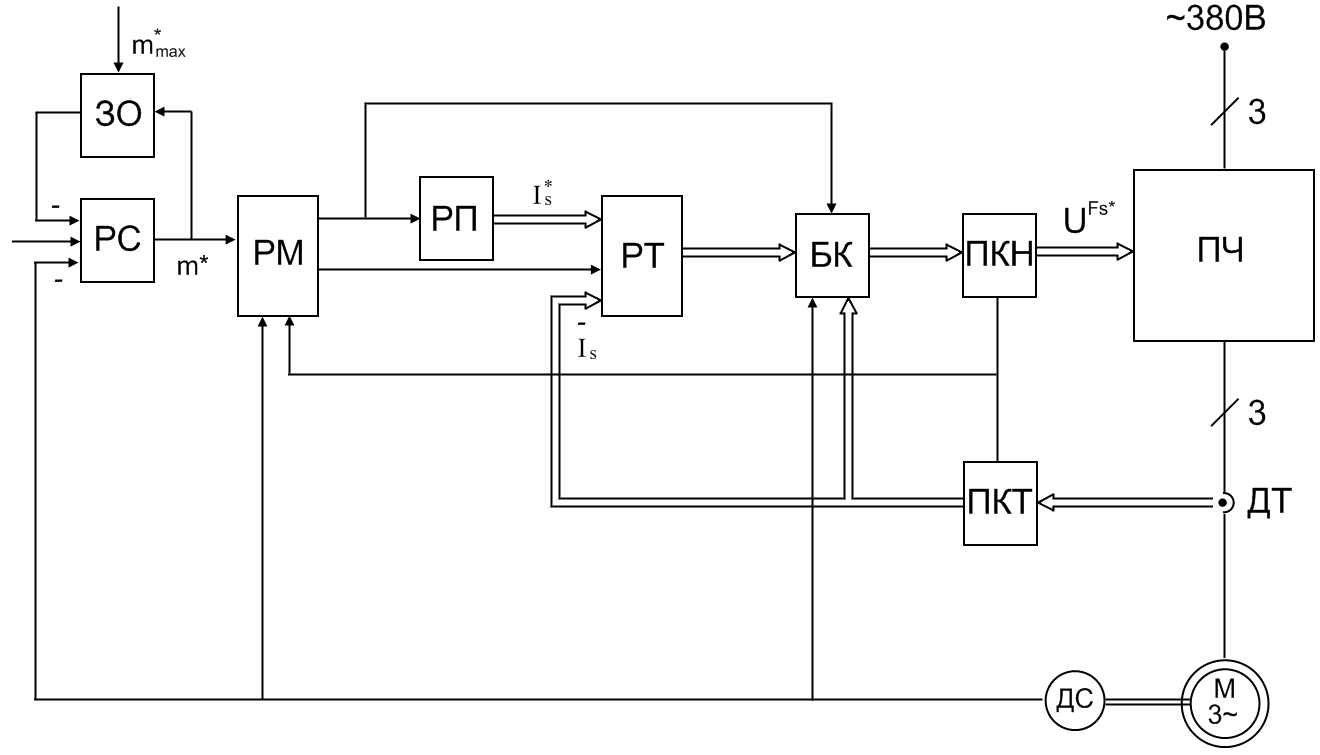 бщая
функциональная схема САР, построенная
на основании данных положений, показана
на рис. 7.
бщая
функциональная схема САР, построенная
на основании данных положений, показана
на рис. 7.
Рис.7. Общая функциональная схема векторной САР.
4.1. Синтез регуляторов токов статора.
В соответствии с общими принципами проектирования систем подчиненного регулирования (СПР) регулирующая часть САР тока строится следующим образом.
На входах звена объекта устанавливается двумерный фильтр первого порядка с некомпенсируемой постоянной времени T, ограничивающий полосу пропускания системы:

Из
требуемого быстродействия принимаем

В соответствии с типовой методикой синтеза регуляторов СПР в виде последовательных корректирующих устройств и обеспечивающих настройку на модульный оптимум каждого из каналов передаточная функция регулятора имеет вид:

Где
 – передаточные функции звена объекта.
При условии компенсации внутренних
перекрестных связей
– передаточные функции звена объекта.
При условии компенсации внутренних
перекрестных связей

В итоге получаем пропорциональный регулятор тока с передаточной функцией:

Синтез регулятора тока по каналу isy производится аналогично.
Данная методика синтеза является приближенной в силу неидеальности компенсации внутренних перекрестных обратных связей объекта, которые вводятся в систему не напрямую, а через некомпенсируемый фильтр, что вызвано необходимостью обеспечения помехоустойчивости и инерционностью датчиков. Для уточненного анализа динамики САР тока статора необходим этап математического моделирования, позволяющий в случае необходимости скорректировать параметры САР для приближения процессов регулирования тока к эталонным для систем подчиненного регулирования.
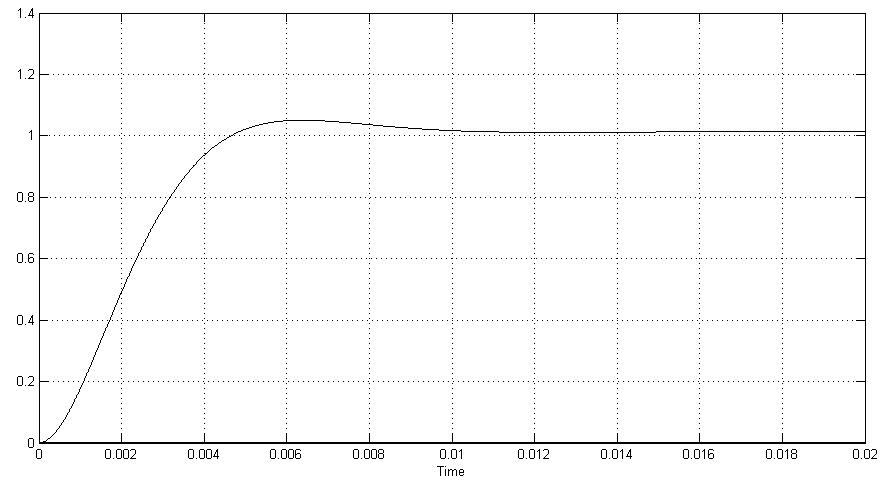
Рис.8. Реакция токов статора на ступенчатое воздействие.
t, c
На выходе регулятора тока получили типовой переходный процесс по двум каналам регулирования (по каналу х и y). По графику видно, что переходные процессы по току isx и току isy совпали. Теоретические и измеренные показатели качества приведены в таблице 1.
Таблица 4. Показатели качества контура тока.
Показатели качества |
Измеренные значения |
Теоретические значения |
σ,% |
5 |
4,3 |
tm, с |
0,0064 |
0,00628 |
tпп, с |
0,0075 |
0,0085 |
Измеренные значения показателей качества почти не отличаются от теоретических.