

Моделирование системы управления электропривода
Моделирование как метод анализа проводится с целью оценки соответствия показателей качества проектируемой СУЭП техническому заданию.
Будем осуществлять цифровое моделирование на ЭВМ в пакете программ MATLAB R12. На рис. 6.1-6.3 показана структурная схема объекта моделирования с системой управления.
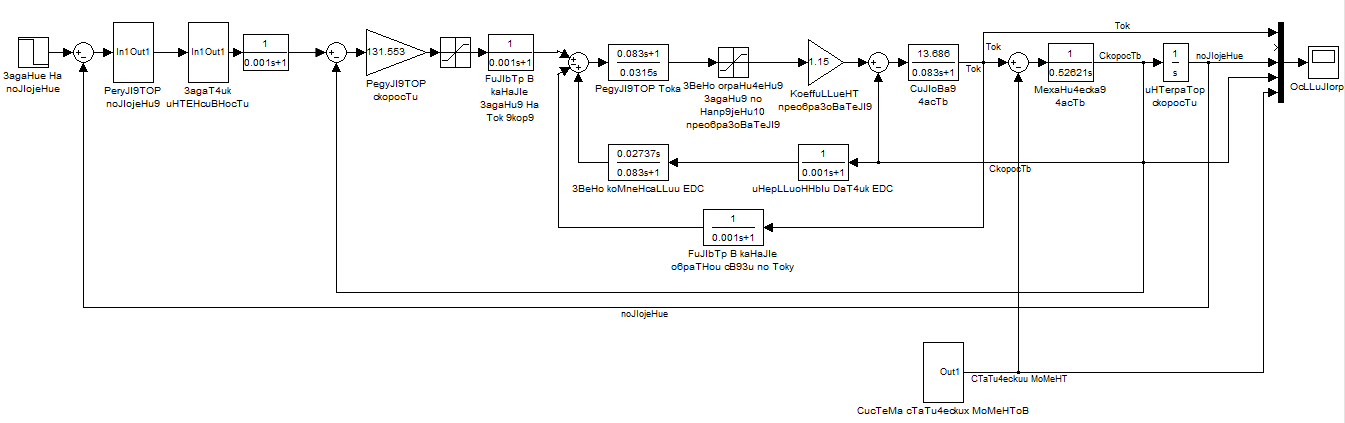
Рис. 6.1. Структурная схема САР положения.
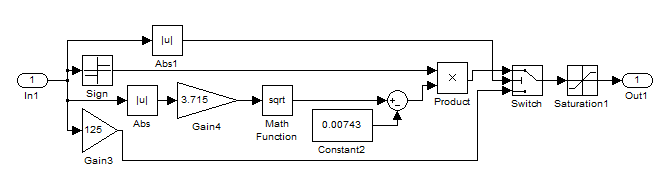
Рис. 6.2. Структурная схема нелинейного регулятора положения.
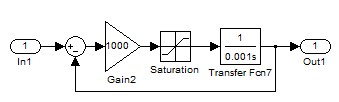
Рис. 6.3. Структурная схема задатчика интенсивности.
На рис. 6.5. представлен переходный процесс при моделировании по структурной схеме 6.1. Возмущающее воздействие принято равным 1,042. На рис. 6.4 более детально показана ошибка по положению.
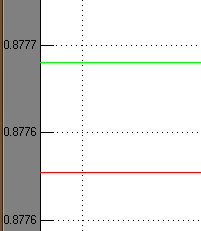
Рис. 6.4. Ошибка по положению
Как
видно из графика, ошибка по положению
равна
 или
или
 м.
м.
Рис. 6.5. Переходный процесс по скорости и моменту системы при ступенчатом задании |
Параметрирование преобразователя
Настройку параметров преобразователя можно проводить либо с панели управления, либо с персонального компьютера.
Сброс параметров преобразователя на заводские установки и настройка уровня доступа.
Если установка параметров выполняется впервые после получения преобразователя с завода изготовителя или неизвестно исходное состояние преобразователя, то полезно установить все параметры в исходное (заводское) состояние. С этой целью следует установить параметр Р051 =21. При этом произойдет сброс всех параметров преобразователя в состояние, соответствующее исходным заводским настройкам преобразователя. Затем параметр Р051 автоматически сбросится в состояние Р051 = 40.
Установим параметр Р051 = 40 [Ключевые параметры]. Указанное состояние обеспечивает доступ к изменению всех параметров преобразователя.
Установим параметр Р052 = 3 [Выбор индицируемых параметров], обеспечивая тем самым отображение на индикаторе PMU всех параметров преобразователя.
Установка данных преобразователя
Установим P067=1 [класса нагрузки DC I] фиксируя класс нагрузки DC I, согласно описанию в главе 3.4.1.
Установим Р078.001 = r071=400 В [Напряжение на входе преобразователя по цепи якоря], фиксируя номинальное напряжение питания тиристорного преобразователя по якорной цепи.
Установим Р078.002 =r074= 220 В [Напряжение на входе преобразователя по цепи возбуждения], фиксируя номинальное напряжение питания тиристорного преобразователя по цепи возбуждения.
Установка номинальных данных двигателя постоянного тока
Установим Р100 = 620 [Номинальный ток якоря двигателя], фиксируя номинальный ток якоря двигателя 620 А.
Установим Р101 = 440 В [Номинальное напряжение якоря], фиксируя номинальное напряжение якоря двигателя, равным 440 В.
Установим Р102 = 22.5 А [Номинальный ток возбуждения двигателя], фиксируя номинальный ток обмотки возбуждения двигателя.
Параметры Р110 [Сопротивление якорной цепи двигателя, Ом], Р111 [Индуктивность якорной цепи двигателя, мГн], Р115 [ЭДС двигателя при его максимальной скорости, % от С/яном], Р118 [ЭДС двигателя при его номинальной скорости, В] и Р119 [Номинальная скорость двигателя, % от иНОм] предварительно могут быть определены расчетным путем, либо взяты из каталожных данных двигателя и затем введены в соответствующие номера параметров. Однако жесткой необходимости в этом нет, поскольку приведенные параметры определяются в дальнейшем в процессе идентификации параметров двигателя.
Установка параметров датчика скорости
Установим Р083 = 2 [Выбор текущего значения частоты вращения], подтверждая этим получение значения частоты с импульсного датчика скорости.
Установим Р743 = 0 [Выбор знака сигнала обратной связи по скорости], разрешая этим прохождение сигнала обратной связи по скорости двигателя с различными знаками (заводская настройка).
Установка параметров ограничения тока якоря и момента двигателя
Установим Р109 = 0 [Установка ограничения тока в функции скорости], фиксируя запрет установки зависимости ограничения тока двигателя от его скорости. При этом параметры Р104...Р108, определяющие функциональную зависимость ограничения тока двигателя от его скорости, соответствуют заводской настройке.
Установим Р171 = 180 % [Граница тока преобразователя в направлении момента I], выбрав тем самым ограничение тока якоря двигателя в направлении «положительного — I» момента, равным 180% от Р100. Значение параметра Р171 выбирается исходя из допустимых значений тока двигателя и допустимых значений тока преобразователя.
Установим Р172 = -180 % [Граница тока преобразователя в направлении момента П], выбрав тем самым ограничение тока якоря двигателя в направлении «отрицательного - II» момента, равным - 180% от Р100.
Установим Р169 = 0 [Регулирование тока и ограничение тока], опустив дополнительный расчет ограничения по моменту, вследствие однозонности системы.
Установим Р180 = 180 % [+ Предел момента I], выбрав тем самым ограничение момента двигателя в направлении «положительного - I» момента, равным 180% от номинального момента. Ограничение значения Р180 выбирается исходя из допустимых значений тока и момента на валу двигателя (указываются в паспортных данных двигателя, либо по технологическим требованиям).
Установим Р181 = -180 % [- Предел момента I], выбрав тем самым ограничение момента двигателя в направлении «отрицательного — II» момента, равным -180% номинального момента.
Установка тепловой защиты двигателя
Установим Р114 = 10 минутам [Тепловая постоянная времени двигателя], фиксируя значение эквивалентной тепловой постоянной времени двигателя, например равным 10 минутам (заводская настройка).
Установка параметров задатчика интенсивности
Основные параметры контура регулирования скорости соответствуют заводской настройке и определяются в процессе идентификации преобразователя. Дополнительно для ограничения темпа задания скорости двигателя и соответственно уменьшения динамических нагрузок на привод устанавливаются:
Р303= 0,54 с [Время разгона 1], обеспечивая разгон двигателя от нуля до заправочной скорости;
Р304 = РЗОЗ [Время торможения 1], обеспечивая торможение двигателя от заправочной скорости до состояния покоя;
Настройка параметров регулятора тока
Параметры регулятора тока определяются в процессе автоматической настройки контура тока. Процедура идентификации параметров контура тока производится в следующей последовательности:
Убедитесь, что преобразователь находится в ожидании команды включения, т. е. имеет место отображение состояния о7.О или о7.1 - Готовность к включению.
Установите параметр Р051 = 25, выбирая режим идентификации параметров контуров регулирования токов якоря и возбуждения двигателя. После установки преобразователь Simoreg на несколько секунд переключается в состояние управления о7.4, а затем возвращается в состояние о7.О или о7.1 и ожидает ввода команд Разрешение работы и Пуск. Мигание десятичной точки на индикаторе состояния управления на панели PMU указывает на готовность преобразователя к идентификации параметров и необходимости ввода команд Разрешение работы и Пуск. После автоматического входа преобразователя в рабочее состояние - Работа начинается процесс идентификации параметров контуров регулирования токов якоря и возбуждения двигателя. Процесс идентификации отражается на дисплее панели управления PMU миганием двухзначных чисел, отделенных друг от друга чертой.
Продолжительность идентификации составляет порядка 40 с. При этом автоматически устанавливаются следующие параметры: Р110 [Сопротивление цепи якоря], Р111 [Индуктивность цепи якоря], Р155 [Коэффициент усиление регулятора тока якоря], Р156 [Постоянная времени интегрирования регулятора тока якоря], Р255 [Коэффициент усиления регулятора тока возбуждения], Р256 [Постоянная времени интегрирования регулятора тока возбуждения] и Р826 [Коррекция естественного момента коммутации]. После окончания идентификации параметр Р051 вернется в исходное состояние Р051=40, и ток возбуждения двигателя упадет до нуля.
Основные параметры контура регулирования тока соответствуют заводской настройке и определяются в процессе идентификации преобразователя.
Настройка параметров регулятора скорости
Параметры регулятора скорости настраиваются в процессе автонастройки, которая производится в следующей последовательности:
Установим параметр Р051 = 26, выбирая режим идентификации параметров контура регулирования скорости. Процесс идентификации также будет отражаться на дисплее панели управления PMU миганием двухзначных чисел, отделенных друг от друга чертой.
Во время идентификации скорость двигателя достигает 20% от максимальной скорости. Продолжительность идентификации не менее 6 с. При этом автоматически устанавливаются параметры Р225 [Коэффициент усиления регулятора скорости], Р226 [Постоянная времени интегрирования регулятора скорости] и Р228 [Постоянная времени фильтра в канале задания на скорость]. По окончании идентификации контура регулирования скорости на дисплее высвечивается параметр Р051=40.
Проверим значение максимальной скорости двигателя. Если после идентификации установка максимальной скорости изменилась
более чем на 10%, то следует выполнить ручную корректировку коэффициента обратной связи по скорости, обеспечив желаемое значение максимальной скорости двигателя. Если корректировка была существенной, то после нее следует вновь повторить идентификацию
параметров контура скорости.
Примечание: Автоматическая идентификация параметров контуров регулирования тока и скорости обеспечивает приемлемые, но не оптимальные динамические показатели качества. При необходимости возможна ручная оптимизация регуляторов с применением осциллографирования переходных процессов переменных электропривода при тестовых возмущениях на его входе.
На этом процесс параметрирования привода заканчивается