

Анализ характеристик датчиков информации
В системе управления электропривода в качестве информационных устройств используется четыре вида датчиков: положения, скорости, тока и напряжения.
Датчики тока и ЭДС уже встроены в преобразователь постоянного тока Siemens DC-MASTER 6RA7085-6DS22, поэтому нам остается выбрать только датчики скорости и положения.
В качестве датчика положения и скорости выбираем импульсный фотоэлектрический датчик серии ДИФ11. Он пригоден для использования при повышенной концентрации влаги и пыли. Датчик имеет 3 канала.
Достоинства датчика серии ДИФ11:
- Широкий выбор по разрешающей способности (количеству импульсов на оборот вала),
- Питание от нестабилизированного источника напряжения,
- Фланцевое или напольное крепление,
- Наличие второго конца вала датчика,
- Работоспособность при любом расположении в пространстве,
- Устойчивость к вибрации и ударам, защита от проникновения пыли и воды IP65.
Принцип действия:
Датчик представляет собой фотоэлектрический пpеобpазователь, в котором поток инфpакpасного излучения, модулированный механическим модулятором, пpеобpазуется в последовательность электрических импульсов, количество которых пpопоpционально угловому перемещению вала датчика.
Конструкция:
Корпус датчиков ДИФ11 выполнен литым из алюминиевого сплава и закрывается литой цилиндрической крышкой. Внутри корпуса датчика установлен механический модулятор, а также фоpмиpователь выходных сигналов.
Полные технические данные зависят от конкретной модификации датчика.
Коэффициенты передачи датчика тока, скорости, положения и ЭДС двигателя в относительных единицах принимаем равными единице.
Построение предварительных вариантов функциональной и структурной схем системы управления электропривода
Преобразователь постоянного тока Siemens DC-MASTER 6RA7085-6DS22 позволяет реализовать комбинации схем:
- системы управления однозонным и двузонным электроприводом,
- системы управления с П- и ПИ-регулятором скорости,
- системы управления с линейным и нелинейным регулятором положения (при использовании опционального ПО).
В соответствие с требованиями к электроприводу принимаем трехконтурную САР положения с внутренними контурами регулирования тока якоря и регулирования скорости и внешним контуром регулирования положения. Выбираем однократно интегрирующую САР скорости. Контуры тока якоря и скорости настроены на модульный оптимум. Поэтому в системе применяется ПИ-регулятор тока и П-регулятор скорости. Ускорение и замедление привода обеспечивается путем формирования линейно изменяющегося сигнала задания на скорость задатчиком интенсивности, задание на который поступает с нелинейного регулятора положения.
Функциональная схема САРП представлена на рис. 4.1.
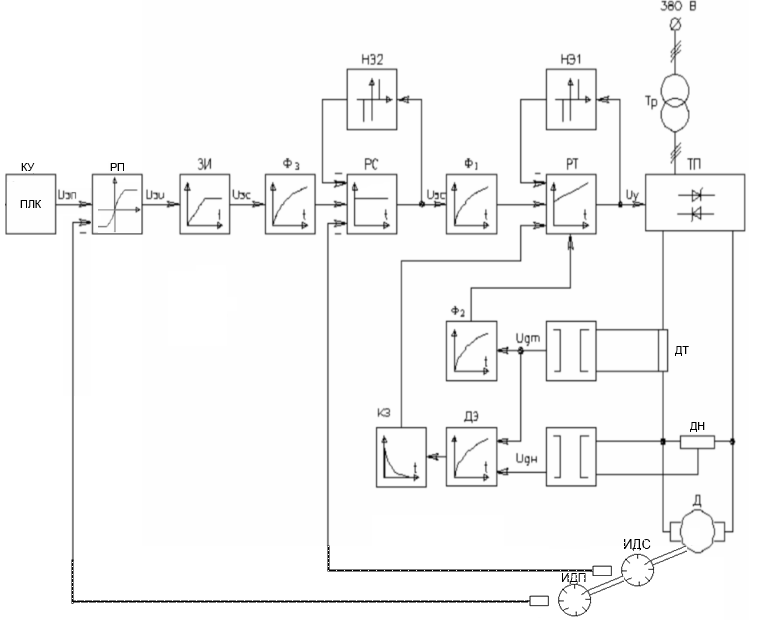
Д – двигатель; ТП – тиристорный преобразователь; Тр – трансформатор; РТ – регулятор тока; Ф – фильтр; НЭ – нелинейный элемент; РС – регулятор скорости; ЗИ – задатчик интенсивности; РП – регулятор положения; КУ – командное устройство; ДС – датчик скорости;
ДП – датчик положения; ДЭ – датчик ЭДС; ДТ – датчик тока; ДН – датчик напряжения; КЗ – компенсационное звено
Рис. 4.1. Функциональная схема САР положения.
Синтез передаточных функций регуляторов системы управления электропривода
Наибольшее применение при проектировании систем управления электроприводов получил метод, основанный на использовании в качестве критериев качества системы управления интегральной квадратичной ошибки. Сочетание аналитического метода с принципом подчиненного регулирования с последовательной коррекцией позволяет унифицировать не только методы расчета, но и средства автоматического управления.
Синтез регуляторов системы управления электропривода проводится на основе критериев качества. Рассматривается система регулирования при ступенчатом изменении воздействия. Необходимый астатизм системы обеспечивается введением нужного количества интегрирующих звеньев. В качестве основной составляющей критерия качества рассматривается ошибка регулирования и ставится задача ее минимизации. В целях получения нужного качества учитывают не только величину, но и характер изменения ошибки, для чего в критерий качества вводят значения производных выходной координаты системы.
Выбор некомпенсируемой постоянной времени.
Величина Тμ является "базовой" при расчете СПР, для которых характерно, что динамические свойства системы не зависит от параметров объекта регулирования и определяется только величиной постоянной времени Тμ фильтра, установленного на выходе регулирующей части системы управления. Таким образом, в стандартных системах регулирования величина Тμ является единственным средством воздействия на систему управления.
С одной стороны уменьшение Тμ приводит к увеличению быстродействия и снижению статической и динамической ошибок по скорости при приложении внешних возмущающих воздействий, с другой стороны величина этой постоянной времени должна быть достаточно большой, чтобы обеспечить высокую помехозащищенность системы, ограничение тока якоря на допустимом уровне и устойчивость работы САУ с учетом дискретность тиристорного преобразователя.
Следовательно, фильтр с постоянной времени Тμ должен реально присутствовать в САУ электроприводом.
В реальных САУ с подчиненным регулированием параметров величина Тμ лежит в пределах 0,001-0,01 с.
Для нашей системы выберем Тμ = 0,001 с.
Расчет контура регулирования тока якоря.
Контур регулирования тока якоря является внутренним контуром САУ электроприводом. Он образуется регулятором тока, фильтром с постоянной времени Тμ, тиристорным преобразователем, якорной цепью и обратной связью по току через датчик тока. В объекте управления имеет место внутренняя обратная связь по ЭДС якоря двигателя. Структурная схема контура тока представлена на рис. 5.1.
Рис. 5.1. Структурная схема контура тока.
При синтезе регулятора внутренняя обратная связь по ЭДС не учитывается.
Передаточная функция регулятора тока, найденная по условию настройки на модульный оптимум:
 ,
,
где Тi1 = Tэ = 0,08304 с;
 с.
с.
При выборе данной передаточной функции регулятора тока замкнутый контур тока будет описываться передаточной функцией фильтра Баттерворта II порядка
Компенсация влияния ЭДС якоря двигателя.
Действие ЭДС якоря приводит к погрешности регулирования тока. Появляется астатизм контура по задающему воздействию. При единичном задании на ток статическая ошибка составит
 ,
,
где Ti = 2·Tμ = 2·0,001 = 0,002 c.

Статическая ошибка по току для этой системы оказывается существенной, поэтому пренебречь влиянием обратной связи по ЭДС нельзя. Для компенсации влияния ЭДС якоря используют принцип комбинированного управления. В систему управления вводится положительная обратная связь по ЭДС. Для удобства технической реализации эта обратная связь подается на вход регулятора тока, а фильтр выносится из контура в цепь задания и обратной связи по току. Структурная схема контура тока с компенсирующей связью по ЭДС представлена на рис. 5.2.
 Рис.
5.2. Структурная схема контура регулирования
тока якоря с компенсирующей связью по
ЭДС.
Рис.
5.2. Структурная схема контура регулирования
тока якоря с компенсирующей связью по
ЭДС.
Передаточная функция звена компенсации ЭДС будет иметь вид
 ,
,
где
 c,
Tк2
= Tэ
= 0,08304 c.
c,
Tк2
= Tэ
= 0,08304 c.
ЭДС якоря двигателя, в отличие от тока якоря и скорости, недоступна для прямого измерения. Датчик косвенного измерения ЭДС якоря использует сигналы датчика тока якоря и датчика напряжения на якоре двигателя. Связь между током якоря, напряжением якоря и ЭДС якоря устанавливает уравнение электрического состояния равновесия в якорной цепи. В операторном виде оно имеет вид
 ,
,
где
 c.
c.
 Выразив
ЭДС, получим уравнение датчика. Структурная
схема датчика ЭДС приведена на рис. 5.3.
Для возможности практической реализации
форсирующего звена и защиты системы от
помех в сигналах датчиков в канале тока
и напряжения датчика ЭДС добавлено
инерционное звено с постоянной времени
Тμ.
Таким образом реальный датчик ЭДС будет
инерционным.
Выразив
ЭДС, получим уравнение датчика. Структурная
схема датчика ЭДС приведена на рис. 5.3.
Для возможности практической реализации
форсирующего звена и защиты системы от
помех в сигналах датчиков в канале тока
и напряжения датчика ЭДС добавлено
инерционное звено с постоянной времени
Тμ.
Таким образом реальный датчик ЭДС будет
инерционным.
Рис. 5.3. Реализация датчика ЭДС.
Расчет контура регулирования скорости.
Согласно требованиям, предъявляемым к электроприводу, система регулирования скорости выполняется однократной. Структурная схема контура скорости представлена на рис. 5.4. Контур регулирования тока настроен на модульный оптимум с наличием компенсации по ЭДС якоря - рассматриваем как фильтр Баттерворта II порядка.
 Контур
скорости образуется регулятором
скорости, контуром регулирования тока
якоря, звеном умножения на поток, звеном
механической части привода и обратной
связью по скорости через датчик скорости.
На объект действует возмущающее
воздействие - момент статического
сопротивления.
Контур
скорости образуется регулятором
скорости, контуром регулирования тока
якоря, звеном умножения на поток, звеном
механической части привода и обратной
связью по скорости через датчик скорости.
На объект действует возмущающее
воздействие - момент статического
сопротивления.
Рис. 5.4. Структурная схема контура регулирования скорости.
В однократной САР скорости, по условия настройки на модульный оптимум, регулятор скорости имеет передаточную функцию пропорционального звена
 ,
,
где Tω = 4·Tμ = 4·0,001 = 0,004 c, φ = 1, т.к. Ф = ФN = const.
 .
.
Передаточная функция замкнутого контура скорости при настройке на модульный оптимум представляет собой фильтр Баттерворта III порядка

Задатчик интенсивности устанавливается на входе САР скорости и предназначен для формирования сигнала задания на скорость. Задатчик интенсивности ограничивает темп нарастания снижения задания на скорость и тем самым обеспечивает, чтобы ускорение и динамический момент электропривода не превышали допустимых значений. Структурная схема задатчика интенсивности представлена на рис. 5.5.
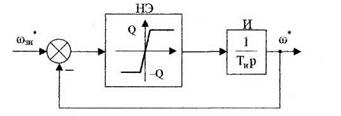
Рис. 5.5. Структурная схема задатчика интенсивности.
Темп задатчика интенсивности представляет собой величину ускорения электропривода в относительных единицах
 ,
,
где
 динамический момент двигателя при
пуске.
динамический момент двигателя при
пуске.
 c-1.
c-1.
Принимаем постоянную времени интегратора Ти = 0,001 с. При этом величина ограничения нелинейного элемента составит:
 =
1,8576·0,001
= 0,0018576.
=
1,8576·0,001
= 0,0018576.
Расчет контура регулирования положения.
Согласно требованиям, предъявляемым к электроприводу, система регулирования положения выполняется нелинейной. Структурная схема контура регулирования положения представлена на рис. 5.6. Контур регулирования скорости настроен на модульный оптимум - рассматриваем как фильтр Баттерворта III порядка.
Контур положения образуется нелинейным регулятором положения, контуром регулирования скорости, звеном интегрирующей части и обратной связью по положению через датчик положения. На объект действует возмущающее воздействие - момент статического сопротивления.
Регулятор положения на Siemens DC-MASTER 6RA7085-6DS22 реализуется при помощи опционального Технологического ПО в главном устройстве, опция S00 ("Свободные функциональные блоки").
Рис. 5.6. Структурная схема контура регулирования положения.
Нелинейный регулятор положения имеет три зоны:
Линейная зона, коэффициент которой равен:
 ,
,
на
участке
 .
.
Нелинейная зона:
 ,
,
где
 ,
,
на
участке
 ,
где
,
где
 .
.
Зона ограничения
 ,
,
на
участке
 .
.
Характеристика регулятора изображена на рис. 5.7.
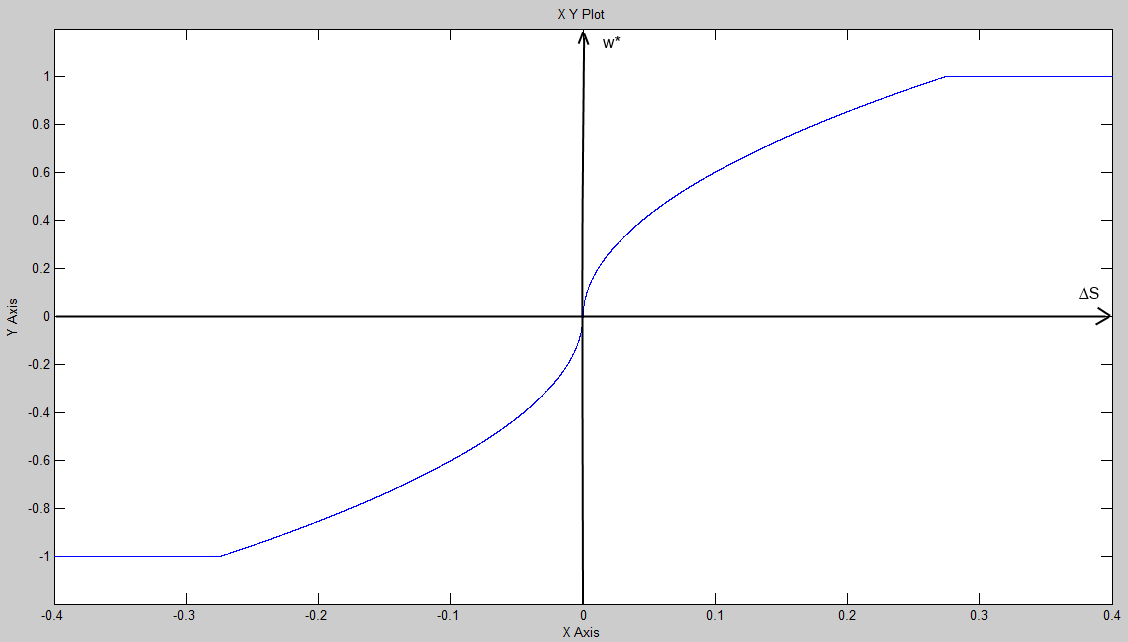
Рис. 5.7. Характеристика нелинейного регулятора.