

Лабораторная работа №2
Исследование настройки типового контура на симметричный оптимум
Цель работы: сравнительное исследование качества переходных процессов по управлению и возмущению в замкнутом контуре при настройке на симметричный оптимум и оптимум по модулю.
1. Основные сведения
Недостатки настройки на оптимум по модулю могут быть устранены при применении настройки регуляторов на симметричный оптимум (СО). Если локальным объектом управления является интегрирующее звено, то уменьшение статической ошибки по возмущению в замкнутом контуре и улучшение качества переходного процесса может быть достигнуто путем использования ПИ-регулятора.
Если выбрать β в соответствии с формулой (1.1), но принять
τ=4Тμ, (2.1)
т о
можно получить передаточную функцию
разомкнутого контура,
настроенного на (СО):
о
можно получить передаточную функцию
разомкнутого контура,
настроенного на (СО):
Передаточная функция замкнутого контура по управлению

(2.2)
при
представлении
![]() в виде
в виде
![]() ξ=0,5.
ξ=0,5.
При ступенчатом управляющем воздействии время первого достижения выходной величиной установившегося значения в контуре, настроенном на СО, составляет 3,1Тμ, а максимальное перерегулирование достигает 43% (рис.2.1).
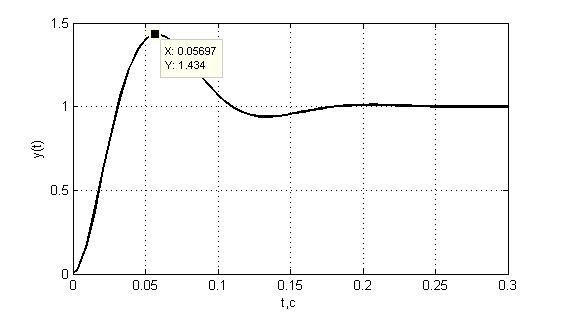
Рис.2.1. Переходная функция контура по управлению при настройке на СО
Термин «настройка на симметричный оптимум» объясняется тем, что ЛАХ разомкнутой системы имеет симметричный характер относительно частоты среза (см. рис. 2.2). Причем запас устойчивости по фазе Δφр составляет 370, что обуславливает такое значительное перерегулирование переходной функции.
Зато длительность переходного процесса по возмущению зависит только от значения малой постоянной времени контура Тμ и не зависит от параметров объекта (см. рис. 2.3).
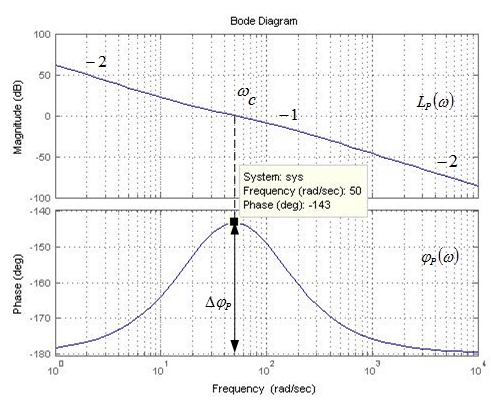
Рис. 2.2. ЛЧХ разомкнутой системы, настроенной на СО
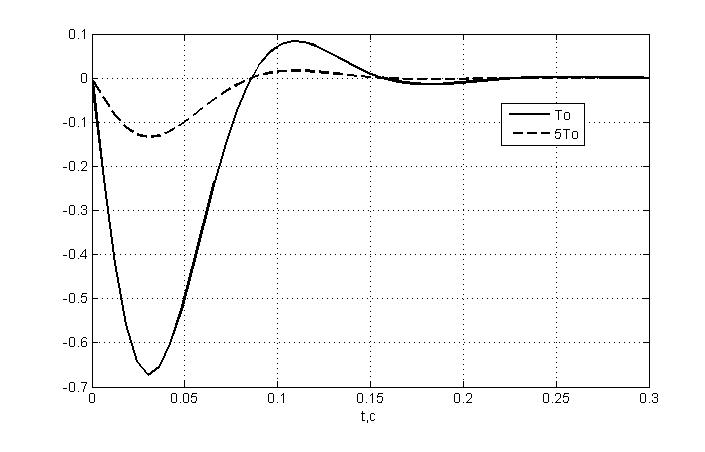
Рис. 2.3. Переходные функции контура по возмущению
2. Порядок выполнения работы
1. а) В приложении SIMULINK пакета MATLAB создайте динамическую структурную схему (рис. 2.4); по формулам (1.1) и (2.1) рассчитайте параметры регулятора, настроенного на СО, и задайте их в блоке PID. Варианты заданий см. табл. 1.2.
б) Задайте единичное ступенчатое воздействие на вход х(t). Проведите моделирование и распечатайте график переходного процесса для выходной переменной y(t); по полученному графику найдите перерегулирование и время регулирования.
в) Отредактируйте параметры модели, изменив постоянную времени объекта на значения 2Т0, 5Т0,10Т0. Получите соответствующие переходные функции.
2. Отредактируйте схему, задав х(t)=0 и z(t)=1. Повторите исследования, проведенные выше.
3. По результатам исследований заполните таблицу по образцу табл. 1.1.
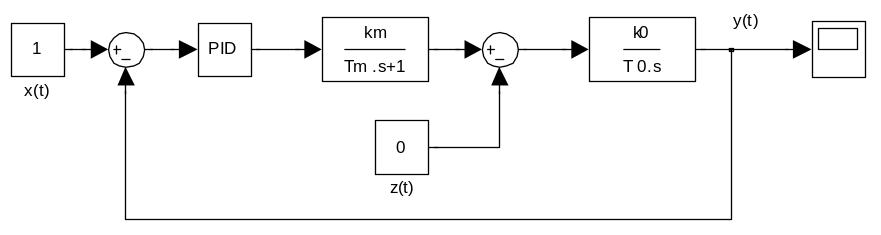
Рис. 2.4. Динамическая структурная схема контура в среде SIMULINK
3. Контрольные вопросы
1) Какой тип регулятора применим при настройке контура на СО, если локальный объект управления – интегрирующее звено?
2) Как выбрать параметры регулятора при настройке контура на СО?
3) В чем достоинства настройки на СО?
4) В чем недостаток настройки на СО?
5) Как снизить перерегулирование переходного процесса по управлению при настройке на СО?
6. Как изменяются показатели качества переходных процессов в контуре, настроенном на СО, при изменении «большой» постоянной времени контура?