

Министерство образования Российской Федерации
Санкт-Петербургский институт машиностроения (ЛМЗ-ВТУЗ)
Кафедра электротехники, вычислительной техники и автоматизации
ТЕОРИЯ ЛИНЕЙНЫХ И НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания к выполнению лабораторных работ
Для студентов специальности 2203.01
Составители:
Томчина О.П.
Шарякова О.Л.
Шестаков В.М.
Санкт-Петербург 2011г.
УДК 62-83
О.П. Томчина, О.Л. Шарякова, В.М. Шестаков,
Теория линейных и нелинейных систем автоматического управления: Методические указания к выполнению лабораторных работ.- СПб.: 2011.
Тематика лабораторных работ посвящена изучению динамических режимов и качества переходных процессов в линейных и нелинейных САУ, применяемых в машинных агрегатах. Работы выполняются на ЭВМ в среде пакета MATLAB-SIMULINK, что позволяет студентам освоить унифицированные системы математического моделирования и глубже изучить динамические характеристики современных САУ.
Методические указания предназначены для студентов специальности 2203.01, изучающих курс “Теория автоматического управления” (части 2 и 3).
Научный редактор докт. техн. наук, проф. В.М. Шестаков.
Рецензенты:
докт. техн. наук, проф. А.Л. Фрадков (Институт проблем машиноведения РАН); канд. техн. наук, доц. А.Е. Епишкин (ПИМаш)
Содержание
Работа №1. Исследование настройки типового контура на оптимум по модулю………………………………………………………………………………4
Работа №2. Исследование настройки типового контура на симметричный оптимум……………………………………………………………………………..9
Работа №3. Исследование настройки типового контура на скорректированный оптимум…………………………………………………………………………….13
Работа №4. Исследование динамики линейных и нелинейных САУ с помощью метода фазовой плоскости……………………………………….………………..18
Литература………………………………………………………………….………32
Приложение………………………………………………………………..………..33
Лабораторная работа №1
Исследование настройки типового контура на оптимум по модулю
Цель работы: Исследование качества переходных процессов по управлению и возмущению в замкнутом контуре, настроенном на оптимум по модулю.
1. Основные сведения
В современных системах автоматического управления широкое применение нашла структура подчиненного регулирования. Система подчиненного регулирования, характеризуется последовательным включением корректирующих устройств и обладает следующими особенностями [1]:
1) количество регуляторов равно количеству локальных объектов управления;
2) все регуляторы включены в систему последовательно таким образом, что каждый внутренний регулятор подчинен смежному с ним внешнему;
3) локальный объект управления представляет собой типовое звено первого или второго порядка и содержит, как правило, одну большую постоянную времени контура;
4) регулятор является типовым и имеет типовые настройки.
На рис. 1.1 приведена динамическая структурная схема типового контура.
z
х y
Рис. 1.1. Типовой контур системы подчиненного регулирования
x – сигнал задания, z –возмущающее воздействие, y – регулируемая переменная, W(p) – передаточная функция регулятора, W0(р) – передаточная функция локального объекта управления, kµ - коэффициент передачи звена с малой постоянной времени Тµ.
Пусть локальный объект управления – апериодическое звено первого порядка с передаточной функцией
W0(p) = k0/(T0р+1),
где
T0
– большая постоянная времени контура
(T0>>
Тµ), k0-
коэффициент передачи объекта. Применяя
пропорционально-интегральный (ПИ)
регулятор
с передаточной функций
![]()
![]() ,
найдем параметры регулятора
,
найдем параметры регулятора
 (1.1)
(1.1)
где β — динамический коэффициент усиления, τ — постоянная времени настройки регулятора.
Реализация настройки на ОМ возможна и при других передаточных функциях объекта.
Если W0(p)=k0/(T0p), то должен быть использован пропорциональный (П) регулятор Wp(p)=β (см. формулу 1.1).
Если объект содержит две «большие» постоянные времени Т01 и Т02
 ,
,
то аналогичный результат может быть получен при применении пропорционально-интегрально-дифференциального (ПИД) регулятора
 (1.2)
(1.2)
с
параметрами
 ,
τ1=T01
и
τ2=T02
при условии T01>T02.
,
τ1=T01
и
τ2=T02
при условии T01>T02.
Передаточная функция замкнутого оптимизированного контура по управляющему воздействию будет
 при
представлении знаменателя в виде
при
представлении знаменателя в виде
![]() коэффициент
демпфирования
коэффициент
демпфирования
![]() .
.
При ступенчатом управляющем воздействии выходная координата в первый раз достигает установившегося значения через время 4,7Тμ при перерегулировании 4,3 % (рис. 1.2). Длительность переходного процесса не зависит от постоянной времени объекта Т0 и определяется малой постоянной времени Тμ. Такой способ настройки контура называется настройкой на оптимум по модулю (ОМ). Наиболее простое объяснение этого термина состоит в том, что при данной настройке стремятся в наиболее широкой полосе частот сделать модуль вещественной частотной характеристики замкнутого контура близким к единице.
На рис. 1.3 представлены логарифмические частотные характеристики разомкнутой САУ. Запас устойчивости по фазе составляет Δφр=630
При настройке контура на ОМ длительность переходного процесса по возмущению определяется соотношением постоянных времени Т0 и Тμ. Чем больше Т0, тем ниже быстродействие системы по возмущению (см. рис 1.4).
Таким образом, настройка на ОМ – это настройка на оптимальное быстродействие по управляющему воздействию.
В
ряде случаев может быть применена
настройка на компромиссный оптимум
(КО), обеспечивающая большее быстродействие,
чем ОМ. При настройке на КО параметры
ПИ-регулятора:
 ,
τ=T0.
При этом
уменьшается время переходного процесса,
но увеличивается перерегулирование и
составляет 16% (см. рис. 1.5).
,
τ=T0.
При этом
уменьшается время переходного процесса,
но увеличивается перерегулирование и
составляет 16% (см. рис. 1.5).
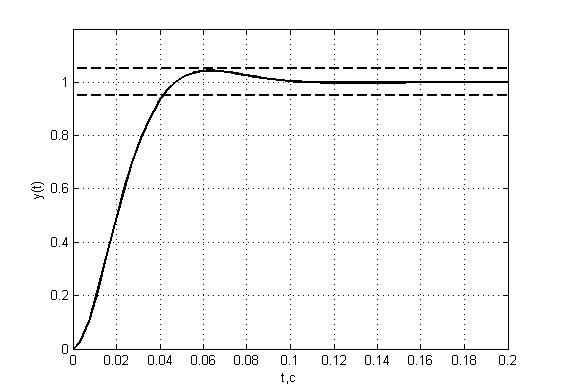
Рис. 1.2. Переходная функция контура при настройке на ОМ
.
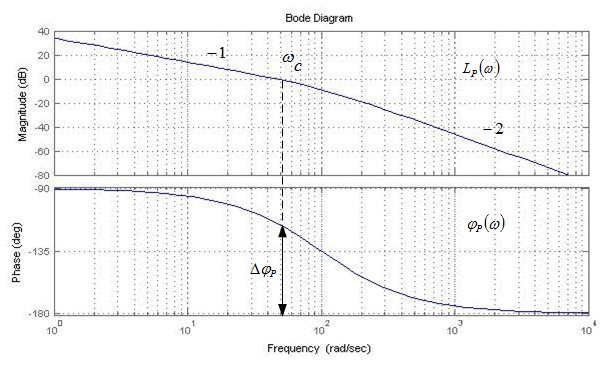
Рис. 1.3. ЛАХ и ЛФХ разомкнутой САУ
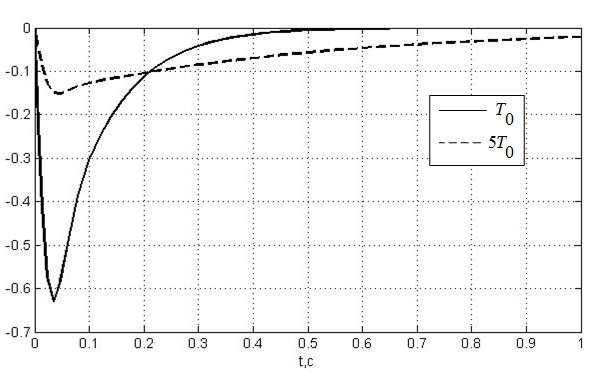
Рис. 1.4. Переходные функции контура по возмущению
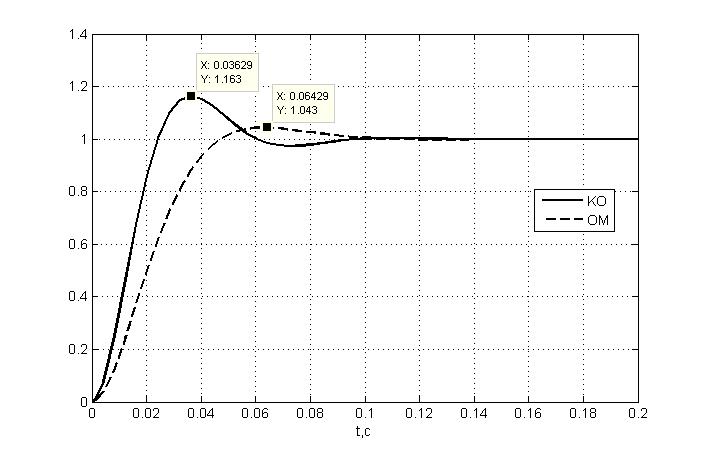
Рис. 1.5. Переходные функции контура при настройках на КО и ОМ