

1.2 Призначення матриць еталонних моделей [1]
Призначення матриць еталонних моделей засноване на використанні стандартних характеристичних поліномів. Ці поліноми забезпечують спеціальне розташування коренів характеристичного полінома системи на комплексній площині коренів. Прикладами таких поліномів є поліноми Ньютона (біноміальний) і Баттерворта.
1.2.1 Стандартні поліноми Ньютона [1]
Всі
стандартні поліноми залежать від
параметра
![]() [6]. Цей параметр визначає радіус розподілу
коренів характеристичного полінома.
Тому це значення завжди позитивно, тобто
>0.
Поліном Ньютона має наступний вигляд:
[6]. Цей параметр визначає радіус розподілу
коренів характеристичного полінома.
Тому це значення завжди позитивно, тобто
>0.
Поліном Ньютона має наступний вигляд:
![]() (1.17)
(1.17)
Поліноми Ньютони з першого по шостий порядок системи представлені в таблиці 1.1. Як видно з виразу (1.17), характеристичний поліпом має негативні дійсні кратні корені, які дорівнюють:
![]()
Таблиця 1.1 – Поліноми Ньютона
-
Порядок системи
Стандартний поліном Ньютона
1

2

3

4

5

6

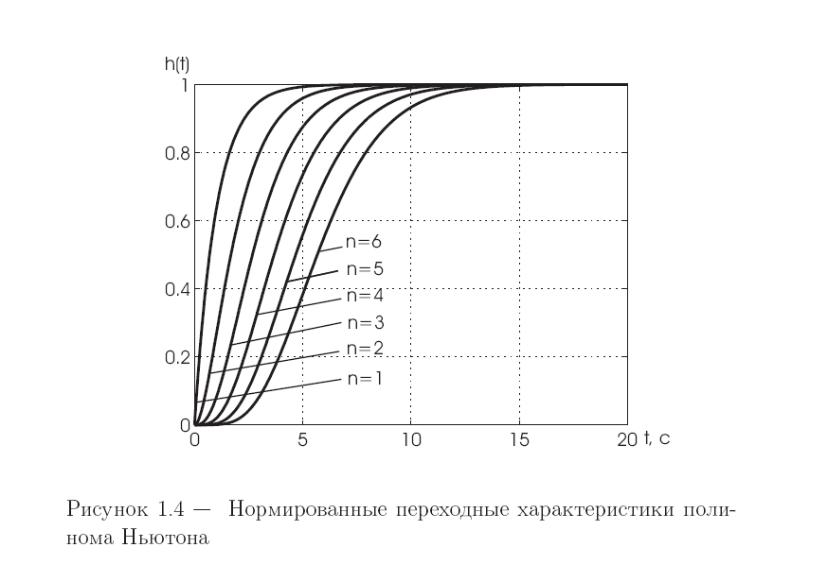
Отже, такі корені забезпечують в системі аперіодичний характер перехідних процесів, тобто з нульовим перерегулюванням.
Зауваження 1.4 У реальних системах управління досягнення нульового значення перерегулювання є досить складним завданням. У багатьох випадках в системі присутнє перерегулювання, яке зумовлене інерційністю об'єкту управління.
Значення порядку полінома. Вид, перехідної функції відповідає передавальній функції, у якої є тільки полюса і відносини вільних коефіцієнтів цих поліномів рівні 1. Нормовані перехідні функції виходять шляхом заміни значення параметра на одиницю в формулах, що визначають поліном Ньютона або Баттерворта при певному порядку полінома. Графіки нормованих перехідних функцій для випадку полінома Ньютона представлені на малюнку 1.4.
1.2.2 Стандартні поліноми Баттерворта [1]
У
стандартному поліномі Баттерворта всі
корені розподілені в лівій півплощині
комплексної площині коренів на півколі
з радіусом
.
Причому кут між сусідніми радіус -
векторами коренів складає
![]() ,
а кут між ближніми радіус - векторами і
уявною віссю дорівнює
,
а кут між ближніми радіус - векторами і
уявною віссю дорівнює
![]() .
.
Тому корені такого полінома знаходяться за формулою :
![]()
Поліном Баттерворта виражається наступним чином :
![]()
Поліноми Баттерворта з першого по шостий порядок представлені в таблиці 1.2.
Нормовані перехідні функції для випадку полінома Баттерворта представлені на малюнку 1.5. Як видно з цього малюнка, перерегульовання нормованих стандартних перехідних функцій становить менше 20 %
Таблиця 1.2 - Поліноми Баттерворта
Порядок системи |
Стандартний поліном Баттерворда |
1 |
|
2 |
|
3 |
|
4 |
|
5 |
|
6 |
|

[1] – В.В.Григорьев, Н.В.Журавлева, Г.В.Лукьянова, К.А.Сергеев. Синтез систем автоматического управления. С-Пб: СПбГУ ИТМО, 2007. – 108 с. Ил.
[2] – В.А.Бесекерский,
Е.П.Попов. Теория систем автоматического
управления. С-Пб:
«Профессия»![]()