

35 Преобразователь частоты с непосредственной связью сети и нагрузки
Преобразователь с непосредственной связью предназначен для преобразования высокой частоты в низкую и состоит из 18 тиристоров, объединенных во встречно-параллельные группы с раздельным управлением (рис. 1). В основе преобразователя лежит трехфазная нулевая схема выпрямления; каждая фаза преобразователя состоит из двух таких встречно включенных выпрямителей. Группу из трех вентилей, имеющих общий катод, называют положительной или выпрямительной, а группу с общим анодом — отрицательной или инверторной. Вентильные группы могут управляться раздельно либо совместно.
Во избежание короткого замыкания управляющие импульсы при раздельном управлении должны подаваться на тиристоры одной из вентильных групп, в соответствии с направлением тока в нагрузке. Для обеспечения раздельной работы применяется специальное логическое устройство, исключающее возможность прохождения тока в одной группе в то время, когда ток проходит в другой группе.
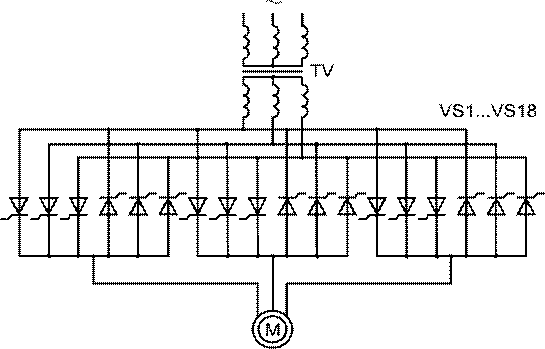
Рисунок 1 - Преобразователь частоты с непосредственной связью
В течение одного полупериода выходного напряжения преобразователя пропускают ток выпрямительные группы, а в течение другого — инверторные. Выходное напряжение состоит из отрезков волн напряжения питающей сети. На рисунке 2 показана кривая выходного напряжения при неизменном угле включения вентилей α = 0.
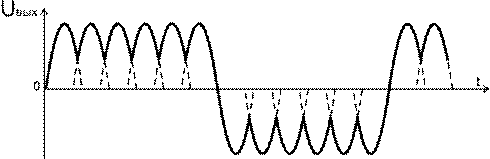
Рисунок 2 - Форма выходного напряжения трехфазного преобразователя частоты с непосредственной связью
К достоинствам этого типа преобразователей можно отнести: 1) однократное преобразование энергии и, следовательно, высокий КПД (около 0,97—0,98); 2) возможность независимого регулирования амплитуды напряжения на выходе от частоты; 3) свободный обмен реактивной и активной энергией из сети к двигателю и обратно; 4) отсутствие коммутирующих конденсаторов, так как коммутация тиристоров производится естественным путем (напряжением сети.)
К недостаткам рассмотренного преобразователя частоты относятся: 1) ограниченное регулирование выходной частоты (от 0 до 40 % частоты сети); 2) сравнительно большое число силовых вентилей и сложная схема управления ими; 3) невысокий коэффициент мощности — максимальное значение на входе преобразователя около 0,8).
№36 Преобразователь частоты со звеном постоянного тока
Наиболее экономичный и эффективный способ регулирования скорости электропривода с асинхронным двигателем – изменение частоты питающего напряжения. Поэтому широкое распространение получили преобразователи частоты с промежуточным звеном постоянного тока.
В преобразователе частоты с промежуточным звеном постоянного тока переменное напряжение сети сначала выпрямляется с помощью управляемого выпрямителя, а затем через фильтр подается на автономный инвертор, который вновь преобразует постоянное напряжение в переменное, но с регулируемой частотой.
В схеме преобразователя частоты с промежуточным звеном постоянного тока имеется выпрямитель V, который может быть управляемый или неуправляемый. Если регулирование напряжения на нагрузке осуществляется автономным инвертором Uz или специальным импульсным преобразователем в цепи постоянного тока, то выпрямитель U может быть неуправляемым.
Наиболее ответственным узлом в преобразователях частоты с промежуточным звеном постоянного тока является автономный инвертор. Дело в том, что этот инвертор работает на автономную нагрузку, в которой отсутствует источник ЭДС. Поэтому автономный инвертор снабжен узлом искусственной коммутации, который прерывает ток в вентиле и включает его в нужный момент времени в соответствии с работой схемы управления.
Преобразователь частоты со звеном постоянного тока позволяет изменять частоту на нагрузке как вверх, так и вниз относительно частоты сети в широком диапазоне.
Широкое применение преобразователей частоты с промежуточным звеном постоянного тока нашли в приводе угольных и проходческих комбайнов, а также в приводах где отсутствуют тормозные режимы.
№37 Основные типы и принцип действия управляемых инверторов. Системы импульсно-фазового управления тиристорами.
Инвертор – устройство, преобразующее постоянный ток в переменный заданного значения и частоты. Применяется для передачи энергии постоянного тока, в электроприводе постоянного тока, для преобразования частоты и т.д.
В выпрямительном режиме работы преобразователя мощность из сети переменного тока поступает к потребителю постоянного тока, а в инверторном мощность из сети постоянного тока поступает к потребителю переменного тока.
Инвертор питается энергией от источника постоянного напряжения и выдает переменное напряжение, а выпрямитель подключен к источнику переменного напряжения и имеет на выходе постоянное напряжение. Имеется третий вариант - схема или система потребляет энергию от источника постоянного напряжения и выдает также постоянное напряжение в нагрузку. Устройство, осуществляющее эту операцию, называется преобразователем. Но не любую схему, имеющую постоянное напряжение на входе и постоянное напряжение на выходе, можно считать преобразователем.
Различают инверторы тока и напряжения.
В выпрямителях в качестве управляемых ключей используются тиристоры. Для открывания тиристора необходимо выполнение двух условий: потенциал анода должен превышать потенциал катода; на управляющий электрод необходимо подать открывающий (управляющий) импульс.
Момент появления положительного напряжения между анодом и катодом тиристора называется моментом естественного открывания. Подача открывающего импульса может быть задержана относительно момента естественного открывания на угол открывания. Вследствие этого задерживается начало прохождения тока через вступающий в работу тиристор и регулируется напряжение выпрямителя.
Для управления тиристорами выпрямителя используется система импульсно-фазового управления (СИФУ), выполняющая следующие функции:
-определение моментов времени, в которые должны открываться те или иные конкретные тиристоры; эти моменты времени задаются сигналом управления, который поступает с выхода САУ на вход СИФУ;
-формирование открывающих импульсов, передаваемых в нужные моменты времени на управляющие электроды тиристоров и имеющих требуемые амплитуду, мощность и длительность.
№38 Основные принципы построения замкнутых систем автоматического регулирования скорости электроприводов.
Основным принципом управления (регулирования) является принцип обратной связи, позволяющий осуществлять контроль регулирования по отклонению управляемого параметра от заданного значения. Структурная схема системы регулирования скорости и момента электропривода приведена на рис. 1. При регулировании (стабилизации) скорости двигателя используется главная отрицательная обратная связь по скорости, осуществляющая контроль скорости двигателя в динамических и статических режимах с помощью датчика обратной связи по скорости В2. Командное устройство S задает уровень регулирования скорости, поэтому его называют задатчиком скорости. Управляющее устройство, в качестве которого обычно используется сумматор, сравнивает сигнал задатчика Uз с сигналом обратной связи Uс, определяет ошибку управления и вырабатывает управляющий сигнал, пропорциональный ошибке и ее знаку. В системах регулирования скорости применяются также внутренние обратные связи, обеспечивающие обратную связь по внутреннему параметру, например по напряжению U двигателя. Она осуществляется с помощью датчиков напряжения UV.
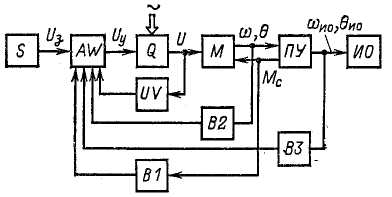
Стабилизация момента двигателя обеспечивается в рассматриваемых системах регулирования с помощью отрицательной обратной связи по току двигателя.
№39 Система автоматического регулирования скорости с обратной связью по э.д.с. (напряжению). Система автоматического регулирования скорости с обратной связью по току.
Система регулирования скорости вращения с обратной связью по ЭДС двигателя применяется для электроприводов с нерегулируемым потоком возбуждения в тех случаях, когда требования к точности поддержания заданной скорости относительно невелики. Диапазон регулирования скорости таких систем обычно не превышает 50. Измерение ЭДС в таких системах производится путем суммирования сигнала, пропорционального напряжению двигателя, и сигнала токовой компенсации, пропорционального падению напряжения в активном сопротивлении якоря двигателя. В настоящее время находят применение два типа систем с обратной связью по ЭДС – система с датчиком ЭДС и система с датчиком напряжения. В первой из них суммирование сигналов производится на входе датчика ЭДС, во второй – непосредственно на входе регулятора ЭДС.
Отрицательная обратная связь по току увеличивает выходное сопротивление усилителя.
Отрицательная обратная связь по току с отсечкой начинает действовать тогда, когда ток якоря двигателя превышает ток отсечки.
Отрицательная обратная связь повышает входное сопротивление ИП.
Отрицательная обратная связь увеличивает входное сопротивление каскада в ( 1 -ру / Су) раз.
Отрицательная обратная связь функционирует только при работе триода в усилительном режиме. Поэтому во время действия запирающего импульса, когда напряжение на коллекторе по абсолютной величине уменьшается, должна быть исключена вероятность перехода рабочей точки в область насыщения.
№40 Система автоматического регулирования скорости двигателя постоянного тока независимового возбуждения с обратной связью по скорости. Система подчиненного регулирования скорости.
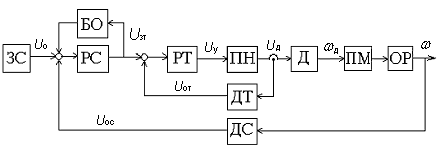
Рис. 8.5. Функциональная схема системы регулирования скорости с подчиненно-токовым управлением
РТ – регулятор тока, ДТ – датчик тока, БО – блок ограничении, uот – сигнал обратной связи по току.
Ограничение по току в данной системе осуществляется путем ограничения выходного напряжения регулятора скорости, т.е. ограничением сигнала задания тока uзт за счет охвата регулятора скорости нелинейной обратной связью (блок БО).
№46:Расчет переходных режимов в электроприводе с асинхронным двигателем
Род тока для электропитания двигателя (постоянный ток, переменный ток трех- или однофазный промышленной или повышенной частоты) определяется выбором типа двигателя: двигатель постоянного или переменного тока (синхронный либо асинхронный). Выбранный двигатель должен в наибольшей степени удовлетворять требованиям, предъявляемым к электроприводу, и одновременно быть максимально экономичным и надежным.
«Правила устройства электроустановок» регламентируют основные положения выбора двигателей для электроприводов.
1. Электрические и механические параметры двигателей (номинальные значения мощности, напряжения, частоты вращения, относительная продолжительность включения, перегрузочная способность, начальный пусковой момент, диапазон регулирования частоты вращения и т.п.) должны соответствовать параметрам приводимых в действие механизмов.
Для привода механизмов, не требующих регулирования частоты вращения, независимо от мощности следует применять двигатели синхронные или асинхронные с короткозамкнутым ротором.
Для привода механизмов с тяжелыми условиями пуска или работы либо требующих изменения частоты вращения следует применять двигатели с наиболее простыми и экономичными методами пуска и регулирования частоты вращения, возможными в данной электроустановке.
Режим работы электропривода определяет требования к статическим и динамическим свойствам двигателя. Статические свойства определяются величиной статического момента сопротивления рабочей машины, требуемой частотой вращения, необходимостью регулирования частоты вращения и его диапазоном, возможностью кратковременных перегрузок и т. п. Динамические свойства определяются показателями переходных режимов: частотой пуска, реверса и торможения. Например, при частых пусках, торможении или реверсе требуется двигатель с малым моментом инерции ротора (якоря).
Большое значение при выборе двигателя имеют экономические требования: стоимость двигателя, его КПД и коэффициент мощности, масса и габариты, расходы по эксплуатации и ремонту. При оценке экономических показателей принимаемого варианта необходимо учитывать экономические показатели не только самого двигателя, но и используемых для его управления пускорегулирующих устройств (статических выпрямителей, регулируемых преобразователей, устройств «мягкого» пуска, защиты и т.п.).
№47. Потери энергии в статических режимах работы электропривода
Установившийся режим характеризуется состоянием равновесия системы двигатель – нагрузка относительно координаты ω. Как и всякое состояние равновесия, установившийся режим может быть устойчивым и неустойчивым. Известно, что критерием статической устойчивости системы является условие возникновения усилия, стремящегося при выведении системы из состояния равновесия вернуть ее в это состояние. Чтобы сформулировать условие статической устойчивости электропривода рассмотрим электромеханическую систему, состоящую из двигателя и рабочей машины, механические характеристики которых представлены на рис. 1.4.а. При этом характеристика двигателя 1 имеет отрицательную жесткость (β<0), а характеристика рабочего органа (рабочей машины) абсолютно мягкая βс=0.
Учет потерь в передачах
При выводе уравнений приведения моментов и уравнений движения мы учитывали потери в редукторе либо через к.п.д., либо вообще не учитывали. Однако это часто приводит к ошибкам в расчетах, особенно в области малых статических нагрузок или при больших, до нескольких десятков тысяч, передаточных отношениях редуктора, когда потери на трение в нем составляют основную часть нагрузки.
Для уточненного определения момента сопротивления на валу двигателя в статическом режиме и для уточнения уравнений движения привода в динамическом режиме с учетом трения в редукторе рассмотрим механическую модель привода, представленную на рис. 1.5, состоящую из двигателя, редуктора и рабочего органа. При этом возможны два направления потока энергии: прямое направление от двигателя к рабочему органу (двигательный режим) и обратное направление от р
№48 режимы работы электропривода S1, S2, S3, S4 и их основные характеристики
Продолжительный режим работы - типовой режим S1
Типовой режим работы электродвигателя S1
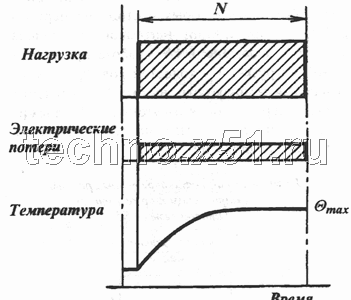
Продолжительный режим работы электродвигателя (S1) – режим работы с постоянной нагрузкой и продолжительностью, достаточной для достижения теплового равновесия, см. рис. (N – работа при постоянной нагрузке; Omax- максимальная достигнутая температура).
Кратковремнный режим работы - типовой режим S2
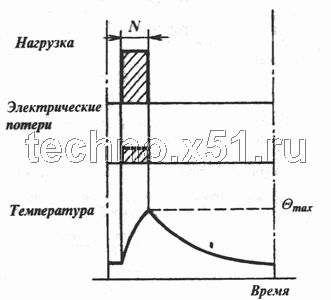
Кратковременный режим (типовой режим S2) – режим работы электродвигателя с постоянной нагрузкой в течение определенного времени, недостаточного для достижения теплового равновесия, за которым следует состояние покоя в течение времени, достаточного для того, чтобы температура машины сравнялась с температурой охлаждающей среды с точностью до 2 К, см. рис. (N – работа при постоянной нагрузке; Omax– максимальная температура, достигнутая в течение цикла).
В соответствии с ГОСТ 183 длительность периода неизменной номинальной нагрузки 10, 30, 60 и 90 мин.
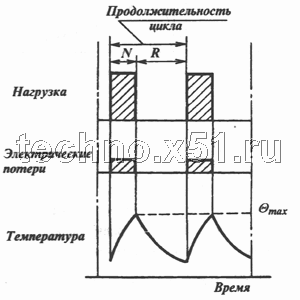
Периодический кратковременный режим работы - типовой режим S3
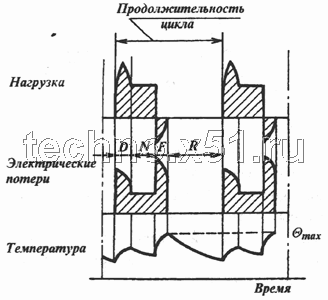
Периодический кратковременный режим (типовой режим S3) – последовательность одинаковых рабочих циклов, каждый из которых состоит из периода работы с постоянной нагрузкой и периода покоя, см. рис. (N – работа при постоянной нагрузке; R – состояние покоя; Omax– максимальная температура, достигнутая в течение цикла).
В этом режиме цикл работы таков, что пусковой ток не оказывает заметного влияния на превышение температуры. Продолжительность цикла недостаточна для достижения теплового равновесия.
Продолжительность включения (ПВ), %: ПВ = 100 N/(N+R).
В соответствии с ГОСТ 183 продолжительность включения (ПВ) 15, 25, 40 и 60 %; продолжительность одного цикла принимают равной 10 мин
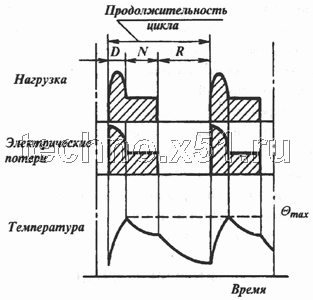
Периодичекий кратковременный режим с пусками - типовой режим S4
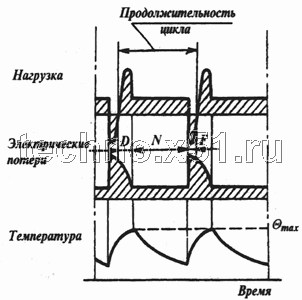
Периодический кратковременный режим электродвигателя с пусками (типовой режим 54) – последовательность одинаковых рабочих циклов, включающих достаточно длительный период пуска, период работы с постоянной нагрузкой и период покоя, см. рис. (D – пуск; N – работа при постоянной нагрузке; R – состояние покоя; Omax– максимальная температура, достигнутая в течение цикла).
Продолжительность включения, %: ПВ = 100 (D+N) /(D+N+R).
В соответствии с ГОСТ 183 продолжительность включений (ПВ): 15, 25, 40 и 60%; число включений в час 30, 60, 120 и 240 при коэффициенте инерции FI, равном 1,2; 1,6; 2,0; 2,5; 4,0; 6,3 и 10.
№49 режимы работы электропривода S5, S6, S7, S8 и их основные характеристики
Периодический кратковременный режим с электрическим торможением - типовой режим S5
Периодический кратковременный режим с электрическим торможением (типовой режим S5) – последовательность одинаковых рабочих циклов электродвигателя, каждый из которых состоит из периода пуска, периода работы с постоянной нагрузкой, периода быстрого электрического торможения и периода покоя, см. рис. (D –пуск; N – работа при постоянной нагрузке: R – состояние покоя; Omax– максимальная температура, достигнутая в течение цикла; F –электрическое торможение). Продолжительность цикла недостаточна для достижения теплового равновесия.
Продолжительность включения, %: ПВ=100(Д+ N+ F)/(D+ N + F + К).
В соответствии с ГОСТ 183 продолжительность включения (ПВ) 15, 25, 40 и 60%; число включений в час 30, 60, 120 и 240 при коэффициенте инерции равном 1,2;. 1,6; 2,0; 2,5 и 4,0.
Периодический непрерывный режим с кратковременной нагрузкой - типовой режим электродвигателя S6
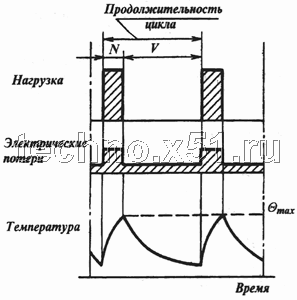
Периодический непрерывный режим работы электродвигателя с кратковременной нагрузкой – последовательность одинаковых рабочих циклов, каждый из которых состоит из периода работы с постоянной нагрузкой и периода холостого хода, см. рис. (N – работа при постоянной нагрузке; V – холостой ход; Omax– максимальная температура, достигнутая в течение цикла). Период покоя отсутствует. Продолжительность цикла недостаточна для достижения теплового равновесия.
Продолжительность включения, %: ПВ = 100 N/(N+ V).
В соответствии с ГОСТ 183 продолжительность включения (ПВ) 15, 25, 40 и 60%; продолжительность одного цикла принимают равной 10 мин.
Периодический непрерывный режим работы электродвигателя с злектрическим торможением - типовой режим S7
Периодический непрерывный режим с электрическим торможением (типовой режим S7) – последовательность одинаковых рабочих циклов, каждый из которых состоит из периода пуска, периода работы с постоянной нагрузкой и периода электрического торможения, см. рис. (D – пуск; N – работа при постоянной нагрузке; F – электрическое торможение; Omax– максимальная температура, достигнутая в течение цикла). Период покоя отсутствует. Продолжительность цикла недостаточна для достижения теплового равновесия. Продолжительность включения ПВ = 100%. В соответствии с ГОСТ 183 число реверсов при электрическом торможении в час 30, 60, 120 и 240 при коэффициенте инерции FI, равном 1,2; 1,6; 2,0; 2,5 и 4,0.
Периодический непрерывный режим с одновременным изменением нагрузки и частоты вращения электродвигателя - типовой режим S8
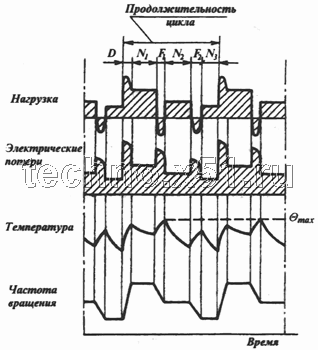
Периодический непрерывный режим с одновременным изменением нагрузки и частоты вращения (типовой режим S8) – последовательность одинаковых рабочих циклов, каждый из которых состоит из периода работы с постоянной нагрузкой, соответствующей заданной частоте вращения, за которым следует период или несколько периодов работы с другими постоянными нагрузками, соответствующими различным частотам вращения (которые достигаются, например, изменением числа полюсов в случае асинхронных двигателей), см. рис. (F1, F2 - электрическое торможение; D –пуск; N1, N2, N3 – работа при постоянных нагрузках; Omax– максимальная температура, достигнутая в течение цикла). Период покоя отсутствует Продолжительность цикла недостаточна для достижения теплового равновесия.
Продолжительность включения, %:
ПВ = 100 (D + N1) (D + N1 + F1+ N2+ F2+ N3);
ПВ = 100 (F1 + N2) (D + N1 + F1+ N2+ F2+ N3);
ПВ = 100 (F2 + N3) (D + N1 + F1+ N2+ F2+ N3);
В соответствии с ГОСТ 183 число циклов в час 30, 60, 120 и 240 при коэффициенте инерции FI равном 1,2; 1,6; 2,0; 2,5 и 4,0.
№51 Расчет мощности двигателя при кратковременном режиме
Если двигатель работает такое время Тк за которое температура его не достигает установившегося значения, а при отключении он успевает охладиться до температуры окружающей среды, то режим работы называют кратковременным (зажимные приспособления металлорежущих станков, шлюзовые устройства, разводные мосты).
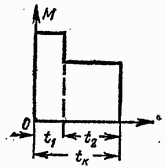
Рис.
1. Диаграмма работы двигателя при
кратковременном режиме. Тогда в
соответствии с графиком (рис. 1) считают,
что t1+t2+…+tn=tk и
по формуле (1)
![]() определяют Mэ. Затем
по каталогу выбирают двигатель,
предназначенный для времени
работы tк номинальный
момент которого Мн≥Мэ Выбранный
двигатель проверяется на мгновенную
перегрузку током так, чтобы Iм/Iэ было
допустимым для этого двигателя.
определяют Mэ. Затем
по каталогу выбирают двигатель,
предназначенный для времени
работы tк номинальный
момент которого Мн≥Мэ Выбранный
двигатель проверяется на мгновенную
перегрузку током так, чтобы Iм/Iэ было
допустимым для этого двигателя.
№52 Расчет мощности двигателя при повторно-кратковременном режиме
Режиму повторно-кратковременной нагрузки соответствуют графики, подобные представленному на рис. 1. Перегрев электродвигателя изменяется по пилообразной ломаной линии, состоящей из чередующихся отрезков кривых нагрева и охлаждения. Режим повторно-кратковременной нагрузки характерен для приводов большинства металлорежущих станков.
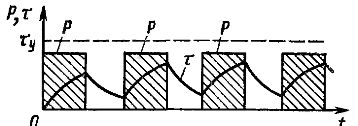
Рис. 1. График повторно-кратковременной нагрузки
Для таких двигателей указывается относительная продолжительность включения (ПВ).
Она равна отношению суммы рабочего времени ко времени цикла tц состоящего из времени работы и времени паузы t0
![]() (1)
(1)
Чем больше ПВ, тем меньше номинальная мощность двигателя при равных габаритах. Следовательно, двигатель, рассчитанный на работу в течение 25% времени цикла при номинальной мощности, нельзя оставлять под нагрузкой 60% времени цикла при той же мощности.
Электродвигатели
строятся для стандартных ПВ=15,25,40,60%
причем ПВ=25% принимается
за номинальную. Двигатель рассчитывается
на повторно-кратковременный режим, если
продолжительность цикла не превышает
10 мин. Расчет ведется по формуле(2)
 а затем для заданной ПВ находят номинальную
мощность двигателя по каталогу. Если
найденная ПВ не соответствует стандартной,
то подсчитанную по
формуле (2) мощность Pэ1 пересчитывают
на стандартную ПВ:
а затем для заданной ПВ находят номинальную
мощность двигателя по каталогу. Если
найденная ПВ не соответствует стандартной,
то подсчитанную по
формуле (2) мощность Pэ1 пересчитывают
на стандартную ПВ:
№53 Основные подходы к выбору типа электродвигателя по каталогу .Классы изоляционных материалов и особенности тепловых процессов в приводных двигателях.
Выбор одного из каталожных типов электродвигателей считается правильным при соблюдении следующих условий:
а) наиболее полное соответствие электродвигателя рабочей машине (исполнительному механизму) по механическим свойствам.
б) максимальное использование мощности электродвигателя во всех режимах работы.
в) соответствие электродвигателя исполнительному механизму и условиям окружающей среды по конструктивному исполнению;
г) соответствие электродвигателя параметрам электропитания.
Мощность двигателя определяется его нагревом. Допустимый нагрев машины ограничивается теплостойкостью изоляционных материалов, а также системой охлаждения двигателя..Изолирующие материалы, применяемые в электрических машинах, делятся на пять классов.
Класс изоляции А. В него входят хлопчатобумажные ткани, шелк, пряжа, бумага и другие органические материалы, пропитанные различными маслами, а также эмали и лаки.
Класс изоляции В. Сюда входят изделия из слюды, асбеста и других неорганических материалов, содержащих органические связывающие вещества.
Класс изоляции ВС. Состоит из слюды, стеклянной пряжи и асбеста на теплостойких лаках.
Класс изоляции СВ. Состоит из неорганических материалов на теплостойких лаках без применения изолирующих материалов класса А.
Класс изоляции С. Включает слюду, фарфор, стекло, кварц и другие неорганические материалы без связывающих веществ.
Наибольшая допустимая температура нагрева для изоляции класса А—105°, для класса В — 120°, для класса ВС—135°, для класса СВ несколько выше, в зависимости от теплостойкости применяемых лаков, для класса С температура не устанавливается. За среднюю температуру окружающей среды принимают +35°.
Соблюдение допустимых ограничений по температуре обеспечивает заданный срок службы электродвигателей 15…20 лет. Превышение допустимых температур ведет к сокрушению срока эксплуатации. Так, для изоляции класса A превышение допустимой температуры нагрева на 8÷10 °C. сокращает срок службы изоляции вдвое. Предельные температуры достигаются двигателем при номинальной нагрузке, температуре окружающей среды 40 °C .При более высокой температуре окружающей среды или при увеличении высоты нагрузка двигателя должна быть снижена относительно номинального значения. При выполнении оговоренных условий для двигателя нормируется не допустимая температура, а превышение температуры обмотки и других частей машины над температурой окружающей среды. Условия нагрева различных частей машины различны. Большему нагреву подвергаются части обмоток, расположенных во внутренних частях машины. Так же не одинаково выделение теплоты в различных режимах работы.
№54 Электрические аппараты ручного управления: кнопки управления, ключи управления, командоаппараты, рубильники, пакетные выключатели, контроллеры. Общая характеристика и критерии выбора по каталогу.
Кнопка управления электрический аппарат для включения (отключения) электрических цепей управления, сигнализации, электроблокировки, а также для ручного дистанционного включения электромагнитных приборов (пускателей, контакторов, реле и др.). К. у. применяют в цепях переменного тока с напряжением до 660 в и постоянного тока не более 440 в; допустимая сила тока 15 а. К. у. могут иметь от 2 до 16 контактов, часть которых обычно нормально замкнута, а другие нормально разомкнуты. Различают К. у. с самовозвратом, контакты которых после нажатия автоматически возвращаются в исходное положение, и без самовозврата с механической или электромагнитной блокировкой. Изготовляют К. у. открытой, закрытой и пылевлагозащищённой конструкции.
Ключ управления ручной переключатель на два и более положений для замыкания и размыкания электрических цепей управления. Обычно устанавливаются на диспетчерских щитах и пультах управления, в системах автоматики и телемеханики. По функциональному назначению различают К. у. для образования командных или сигнальных цепей управления (командные К. у.), для квитирования (исправления) приходящих сигналов (квитирующие К. у.), а также К. у., совмещающие эти функции. Часто устанавливают К. у. со встроенной сигнальной лампой для указания положения ключа.
Командоаппараты - устройства преимущественно ручного управления, предназначенные для переключений в цепях управления электрическими аппаратами постоянного и переменного тока. Замыкая и размыкая при помощи командоаппарата те или иные цепи, оператор может дистанционно подать команду на запуск или остановку электрической машины или на изменение режима ее работы.Командоаппараты выполняются как контактными, так и бесконтактными. Контактные командоаппараты можно разделить на следующие основные группы:1кнопки управления;2универсальные переключатель и пакетные ключи;3командоконтроллеры;4путевые и конечные выключатели и переключатели.Командоаппараты могут приводиться в действие, ручным или ножным приводом , двигательным приводом , рабочей машиной . Они могут выполняться с фиксированным положением, когда после снятия воздействия коммутационное положение аппарата остается неизменным,- и с самовозвратом, когда после прекращения воздействия его контакты возвращаются в исходное (нулевое) положение.
Рубильники являются простейшими аппаратами ручного управления, которые используются в цепях переменного тока при напряжении до 660 В и постоянного тока при напряжении до 440 В.Эти аппараты служат для включения и отключения, а переключатели — для переключения электрических цепей постоянного и переменного тока при номинальной нагрузке.По количеству полюсов рубильники подразделяются на одно-, дух- и трехполюсные, по роду токауправления бывают с центральной и боковой рукояткой, по способу присоединения - с передней и задней стороны аппарата.Рубильники с центральной рукояткой служат в качестве разъединителя, т. е. отключают предварительно обесточенные электрические цепи, а с боковой рукояткой и рычажными приводами — отключают цепи под нагрузкой.
Пакетные выключатели , предназначены для работы в электрических цепях напряжением до 380В переменного тока частотой 50, 60Гц и 400Гц и до 220В постоянного тока в качестве:
- вводных выключателей и переключателей в цепях управления электроустановок распределения энергии;
- коммутационных аппаратов с ручным приводом для нечастых включений и отключений;
- для ручного управления асинхронными электродвигателями в электрических цепях переменного тока.
Контро́ллер — многоступенчатый, многоцепной коммутационный аппарат с ручным управлением, предназначенный для изменения схемы главной цепиэлектрического двигателя или цепи возбуждения, включения и выключения электрической цепи с возможностью одновременно производить сложные переключения схемы управления с помощью одной рукоятки (маховика).
№55 Электрические аппараты дистанционного управления:контакторы,магнитные пускатели,электромагнитное реле.
Контактор - это дистанционно управляемый коммутационный аппарат, позволяющий коммутировать мощные нагрузки как переменного, так и постоянного тока.Отличительной особенностью электромагнитных контакторов, по сравнению с близкими к ним электромагнитными реле является то, что контакторы разрывают электрическую цепь в нескольких точках одновременно.Электромагнитный контактор представляет собой электрический аппарат, предназначенный для коммутации силовых электрических цепей. Замыкание или размыкание контактов контактора осуществляется чаще всего с помощью электромагнитного привода.
Общепромышленные контакторы классифицируются:.по роду тока главной цепи и цепи управления (включающей катушки) - постоянного, переменного, постоянного и переменного тока;1по числу главных полюсов - от 1 до 5;2по номинальному току главной цепи - от 1,5 до 4800 А;3по номинальному напряжению главной цепи: от 27 до 2000 В постоянного тока; от 110 до 1600 В переменного тока частотой 50, 60, 500, 1000, 2400, 8000, 10 000 Гц;4по номинальному напряжению включающей катушки: от 12 до 440 В постоянного тока, от 12 до 660 В переменного тока частотой 50 Гц, от 24 до 660 В переменного тока частотой 60 Гц;5по наличию вспомогательных контактов - с контактами, без контактов.Контакторы также различаются по роду присоединения проводников главной цепи и цепи управления, способу монтажа, виду присоединения внешних проводников и т.п.
Магнитные пускатели предназначены, главным образом, для дистанционного управления трехфазными асинхронными электродвигателями с короткозамкнутым ротором, а именно:
- для пуска непосредственным подключением к сети и остановки (отключения) электродвигателя (нереверсивные пускатели),
- для пуска, остановки и реверса электродвигателя (реверсивные пускатели). Кроме этого, пускатели в исполнении с тепловым реле осуществляют также защиту управляемых электродвигателей от перегрузок недопустимой продолжительности.
Магнитные пускатели открытого исполнения предназначены для установки на панелях, в закрытых шкафах и других местах, защищенных от попадания пыли и посторонних предметов.
Магнитные пускатели защищенного исполнения предназначены для для установки внутри помещений, в которых окружающая среда не содержит значительного количества пыли.
Магнитные пускатели пылебрызгонепроницаемого исполнения предназначены как для внутренних, так и для наружных установок в местах, защищенных от солнечных лучей и от дождя (под навесом) Реле — это элемент автоматического устройства, который при воздействии на его вход внешних физических явлений скачкообразно принимает значение выходной величины. Этих значений, чаще всего у выходной величины бывает два: например, в электромагнитном реле два устойчивых состояния контактов – замкнутое и разомкнутое.Электромагнитное реле реагирует на изменение каких-либо определенных параметров замыканием или размыканием своих контактов. Контакты реле включаются в цепь, которая осуществляет контроль или управление аппаратами, включенными в силовую цепь, для коммутации, например: осуществляет управление контакторами и др.Реле могут работать под воздействием самых различных факторов: электрического тока, световой энергии, давления жидкости или газа, уровня жидкости и т. п.По способу присоединения различают первичные, вторичные и промежуточные реле.Первичные реле включаются непосредственно в цепь управления.Вторичные реле включаются через измерительные трансформаторы тока или напряжения.Промежуточные реле работают от исполнительных органов других реле и предназначаются для усиления и размножения сигнала, т. е. распределения воздействия на несколько цепей.Основными параметрами реле являются:а) номинальные данные - ток, напряжение, время и другие величины, на которые рассчитаны реле,б) величина срабатывания, т. е. то значение параметра (ток, напряжение, время и пр.), при котором происходит автоматическое действие реле; реле реагирует на тот параметр, на который оно было изготовлено,в) уставка реле – значение величины срабатывания, на которую отрегулировано данное реле (реле, имеет некоторое количество уставок, фиксирующих величину срабатывания в определенных пределах). Реле́ вре́мени — реле, предназначенное для создания независимой выдержки времени и обеспечения определённой последовательности работы элементов схемы. Реле времени применяется в случаях, когда необходимо автоматически выполнить какое-то действие не сразу после появления управляющего сигнала, а через установленный промежуток времени.
№56 Аппараты и типовые схемы защиты, блокировки и сигнализации в электроприводе.
Для обеспечения надежной работы ЭП и технологического оборудования в схемах управления предусматривается специальная защитная аппаратура, различные блокировочные связи, и средства сигнализации, измерительные и регистрирующие приборы.
Аппараты максимальной токовой защиты. При работе ЭП может произойти замыкание электрических Цепей между собой или на землю, а также увеличение тока в силовых цепях двигателя сверх допустимого предела. Для защиты ЭП и питающей сети от больших токов предусматривается максимальная токовая защита (плавкие предохранителей, реле максимального тока и автоматических выключателей).
Плавкие предохранители FU включаются в каждую линию питающей двигатель сети между выключателем Q напряжения сети и контактами линейного контактора КМ для АД и для ДПТ . Цепи yпpaвления также могут защищаться плавкими предохранителями. (рис. 1)
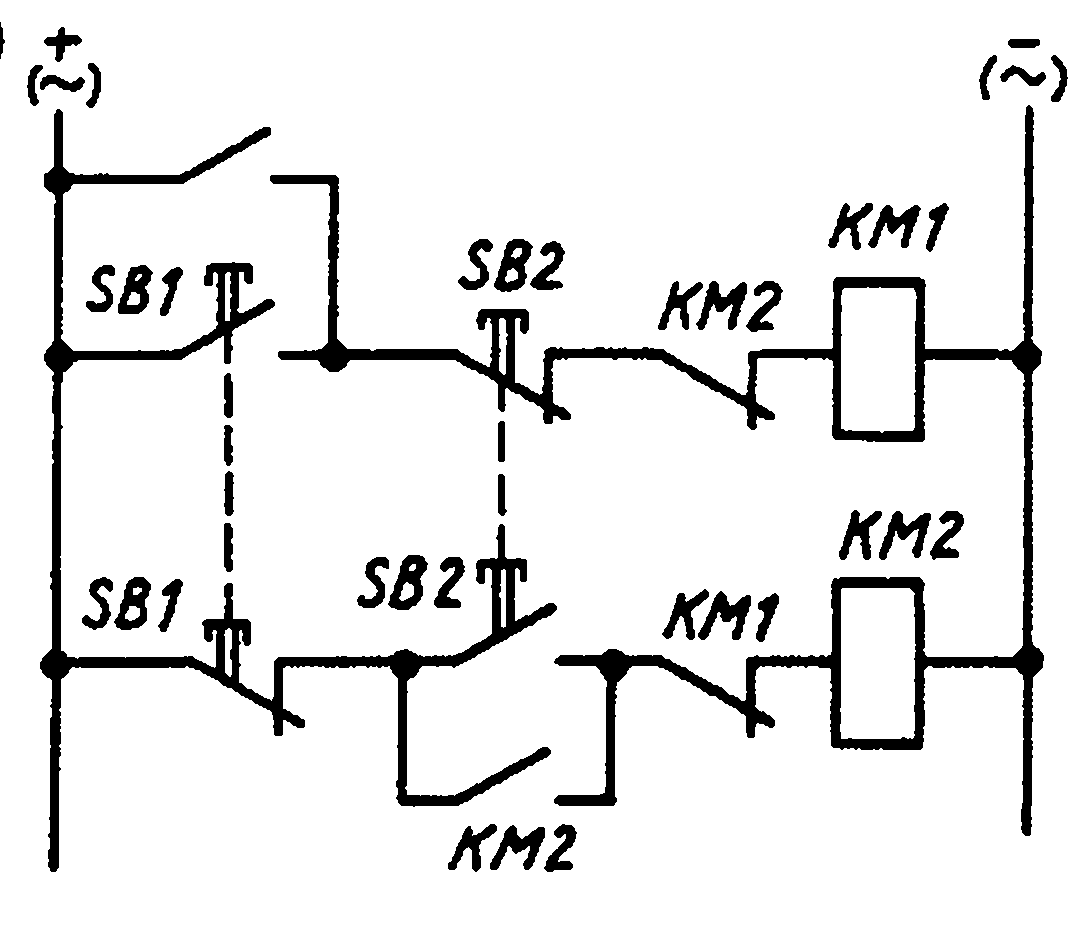
Электрические блокировки в схемах ЭП. Они служат для обеспечения заданной последовательности операций при его управлении, предотвращения нештатных и аварийных ситуаций и неправильных действий со стороны оператора, что э итоге повышает надежность работы ЭП и технологического оборудования. Одновременное включение двух контакторов может быть предотвращено и с помощью использования двухцепных кнопок управления, имеющих замыкающий и размыкающий контакты. (рис.2)
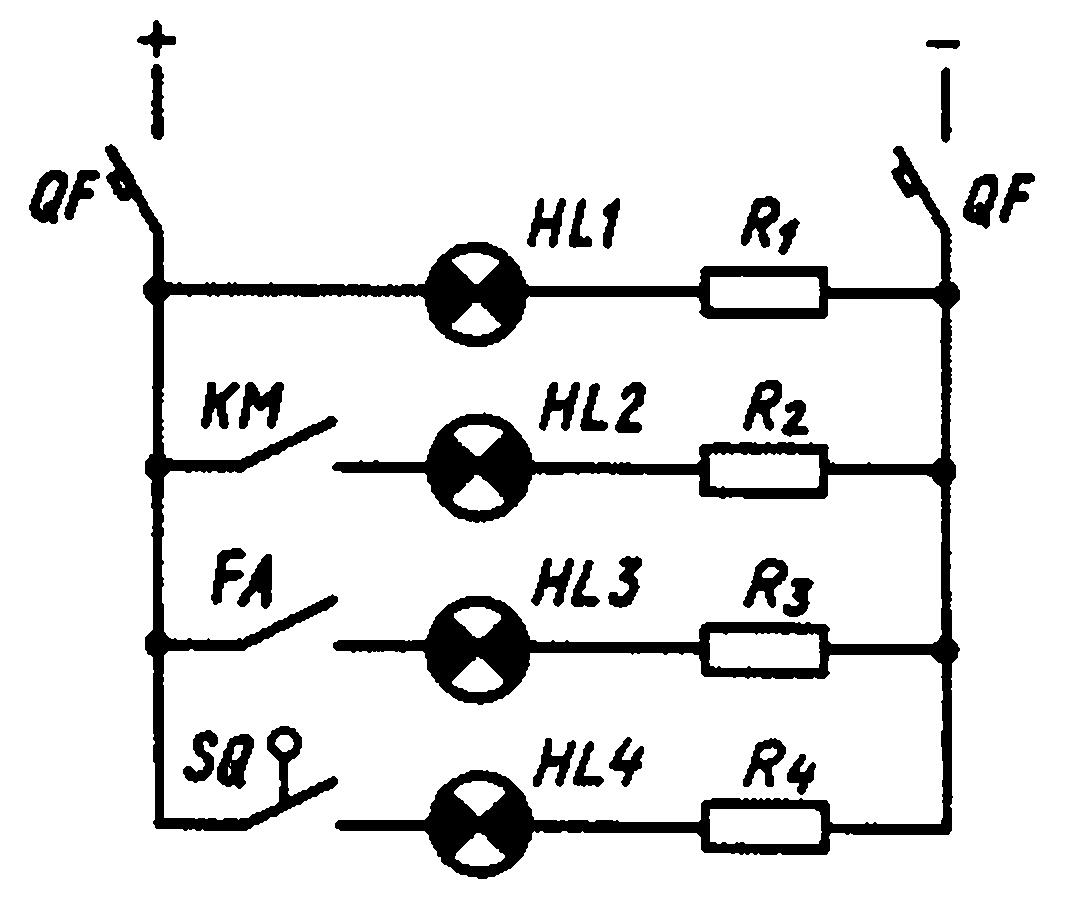
Сигнализация в схемах управления ЭП. Для контроля хода технологического процесса или последовательности выполняемых операций, состояния защиты и наличия напряжения питания или какого-либо электрического сигнала применяется сигнализация, которая может быть световой (сигнальные лампы, табло), звуковой (звонок, сирена) и визуальной (указательные реле, измepитeльныe приборы).
Лампа HL1 (рис. 3) в
схеме управления ЭП сигнализирует о
подаче напряжения на схему (включение
автомата QF), лампа HL2—о включении
контактора КМ, лампа HL3—о срабатывании
реле максимальной токовой защиты FA,
лампа НL4 — о срабатывании конечного
выключателя SQ.
Плавкие
рис.1-рис.2-
рис.3-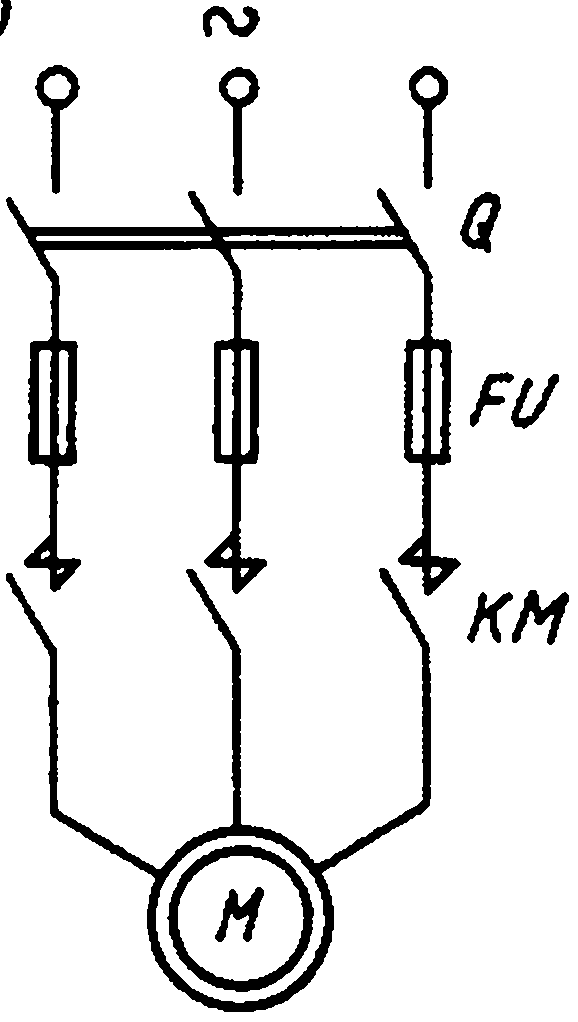
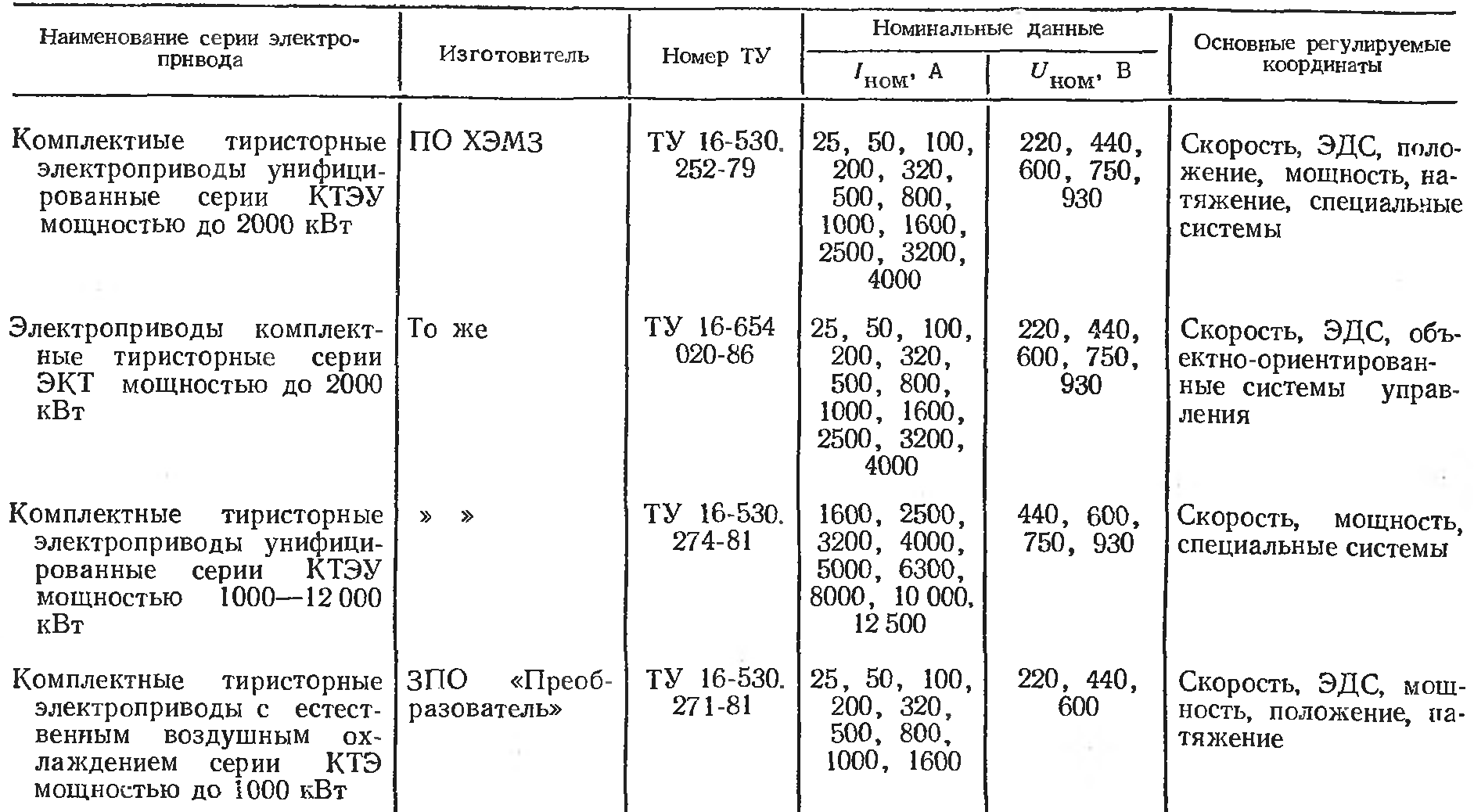
№57. Расчет и выбор по каталогу тиристорного преобразователя (комплектного электропривода). Комплектные электроприводы серий ЭКТ, КТЭУ, КТЭ – общая характеристика.
Тип преобразователя должен соответствовать типу двигателя. Для двигателя постоянного тока требуется тиристорный преобразователь напряжения, а для двигателей переменного – транзисторный.
Выбранный преобразователь должен соответствовать следующим условиям:
1) требуемая мощность преобразователя:
![]()
2) ток преобразователя определяется исходя из параметров двигателя и нагрузки:
![]()
3) Напряжение преобразователя должно соответствовать следующему условию:
![]()
Выбираем преобразователь из каталога по первому условию. Далее выполняется проверка преобразователя по остальным условиям.
После проверки выписываем следующие номинальные параметры двигателя из каталога:
- номинальный
ток ![]() ;
;
- номинальное
напряжение питания ![]() ;
;
- номинальная
мощность ![]() .
.
№58. Расчет и выбор по каталогу частотного преобразователя. Серийные преобразователи частоты ЭКТ, ЭКТ2, ЭКТЗР, АТО1-АТО6 – общая характеристика.
1. Преобразователь
частоты можно выбрать быстро и точно
на основе значения тока ![]() ,
который потребляет электродвигатель.
Пример расчета и выбора преобразователя
частоты: Электродвигатель 7,5 kW, 3 х 400 В
потребляет ток 14,73 А. Выбирается такой
преобразователь, у которого длительный
максимальный выходной ток больше или
равен 14,73 А.
,
который потребляет электродвигатель.
Пример расчета и выбора преобразователя
частоты: Электродвигатель 7,5 kW, 3 х 400 В
потребляет ток 14,73 А. Выбирается такой
преобразователь, у которого длительный
максимальный выходной ток больше или
равен 14,73 А. ![]()
2. Преобразователь
частоты можно выбирать на основе полной
мощности ![]() ,
потребляемой электродвигателем и полной
мощности, подаваемой преобразователем
частоты. Электродвигатель 7,5 kW, 3x400 В
потребляет ток 14,73 А. Sm =U х I х √3 / 1000 = 400
х 14.73 √3 / 1000= 10,2 кВА. Выбирается такой
преобразователь, у которого
,
потребляемой электродвигателем и полной
мощности, подаваемой преобразователем
частоты. Электродвигатель 7,5 kW, 3x400 В
потребляет ток 14,73 А. Sm =U х I х √3 / 1000 = 400
х 14.73 √3 / 1000= 10,2 кВА. Выбирается такой
преобразователь, у которого ![]()
3. Преобразователь частоты можно также выбирать по мощности Рм, вырабатываемой электродвигателем. Однако данный способ является неточным, поскольку cos φ и коэффициент полезного действия η изменяются с нагрузкой. Пример расчета мощности электродвигателя: Электродвигатель мощностью 3 кВт, имеющий cos φ = 0,80 и η = 0,81, потребляет мощность Sм = Pм/(η х cos φ) = 3,0 / (0,80 х 0,81 )=4,6 кВА выбирается такой преобразователь, у которого длительная максимальная выходная мощность больше или равна 4,6 кВА
4. На практике номинальная мощность большинства преобразователей частоты соответствует стандартной серии асинхронных электродвигателей. Поэтому преобразователи частоты часто выбирают исходя именно из этого соображения, что, однако, может привести к неточному определению их характеристик, особенно если электродвигатель не нагружается полностью.
ЭКТ
ЭКТ1Х-Х/380-ХХ: Э - электропривод; К - комплектный; Т - тиристорный; 3 - третье поколение; Х - вид торможения (Д - динамическое, Р - рекуперативное); Х - номинальный ток на выходе, А (25, 63, 160, 250, 400); 380 - номинальное напряжение на выходе, В; Х - номинальная частота на выходе, Гц (50, 200, 400); Х - климатическое исполнение и категория размещения по ГОСТ - 15150 - 69 (УХЛ4, О4).
АТО
Электромашинные преобразователи тока и частоты предназначены для преобразования переменного трехфазного тока частотой 50 Гц (АТО, АТТ) в переменный однофазный и трехфазный ток частотой 50 Гц или 400, 427, 500 и 1000 Гц.
Обозначение АХХ-Х-ХР: - А – преобразователь; Х - род тока на входе преобразователя: П-постоянный, Т-переменный трехфазный;Х - род тока на выходе преобразователя: О-однофазный переменный, Т-трехфазный переменный; Х - номинальная выходная мощность, кВт Х - номинальная выходная частота, Гц; Р - с повышенным ресурсом.
№59 Принцип действия и основные типы задатчиков интенсивности. Расчет параметров задатчиков интенсивности.
Задатчики интенсивности (ЗИ) являются типовым блоком в системе управления электроприводом. ЗИ (интегрозадающие устройства) служат для формирования плавного изменения выходного сигнала при переходе задающего сигнала от одного уровня к другому, а именно создать линейное нарастание и спадание сигнала с требуемым темпом.
Аналоговые
задатчики
интенсивности выполняются на операционных
усилителях. Первый усилитель DA1 работает
без обратной связи, но с ограничением
выходного напряжения U1 и имеет
характеристику прямоугольной формы.
Второй ОУ DA2 – интегратор с постоянным
темпом нарастания![]()
Темп интегрирования регулируется изменением Rвх2. Третий усилитель DA3 формирует отрицательное напряжение обратной связи
![]()
При подаче на вход задающего напряжения Uзад напряжение на выходе Uвых возрастает линейно.
В момент времени
tп, когда
![]() интегрирование прекращается и выходное
напряжение, достигнув значение
интегрирование прекращается и выходное
напряжение, достигнув значение
![]() далее
остается неизменным. При снятии с входа
задающего напряжения
далее
остается неизменным. При снятии с входа
задающего напряжения
(Uзад = 0) происходит процесс линейного уменьшения выходного напряжения до нуля.
цифровой задатчик интенсивности (цзи) реализуется на цифровых интегральных микросхемах (ИМС). ЦЗИ состоит из трёх частей: ФЧ – формирователь чисел, УДЧ – управляемый делитель частоты, ГТИ – генератор тактовых импульсов. в состав ФЧ входят компаратор ЕС, ячейка управления W1 и реверсивный счетчик. УДЧ состоит из ячейки управления W2 и счетчика СТ1, работающего на вычитание.
Цифровое задание по уровню N3.У с числом разрядов n преобразуется ФЧ в число N на входе, линейно изменяющееся от начального значения N0 до установившегося Nз.у в течении времени
![]() где
fу – управляющая частота.
где
fу – управляющая частота.
Темп изменения выходного числа N определяется fу, которая формируется УДЧ в зависимости от цифрового задания темпа Nз.т.
![]() гдеfг
– частота ГТИ.
гдеfг
– частота ГТИ.![]()
№60 Электропривод с синхронным двигателем: основные принципы построения и типовые схемы управления.
Возможны следующие способы пуска синхронного двигателя: асинхронный пуск на полное напряжение сети и пуск на пониженное напряжение через реактор или автотрансформатор.
Асинхронный пуск синхронного электродвигателя
Схема возбуждения синхронного двигателя с глухоподключенным возбудителем может применяться в том случае, если пусковые токи не вызывают падения напряжения в сети больше допустимого и статистический момент нагрузки Мс < 0,4 Мном.
Асинхронный пуск синхронного двигателя производится присоединением статора к сети. Двигатель разгоняется как асинхронный до скорости вращения, близкой к синхронной.
В процессе
асинхронного пуска обмотка возбуждения
замыкается на разрядное сопротивление,
чтобы избежать пробоя обмотки возбуждения
при пуске, так как при малой скорости
ротора в ней могут возникнуть значительные
перенапряжения. При скорости вращения,
близкой к синхронной, срабатывает
контактор КМ (цепь питания контактора
на схеме не показана), обмотка возбуждения
отключается от разрядного сопротивления
и подключается к якорю возбудителя.
Пуск заканчивается.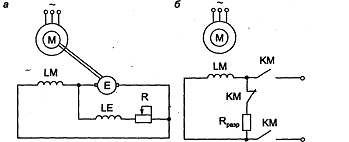
Рис. 1Типовые узлы схем возбуждения синхронного двигателя
Использование тиристорных возбудителей для пуска синхронных электродвигателей
В настоящее время широкое распространение для возбуждения синхронных двигателей находят тиристорные возбудители. Они поставляются в комплектном виде.
Тиристорные возбудители синхронных электродвигателей более надежны и имеют более высокий к.п.д. по сравнению с электромашинными возбудителями. С их помощью легко решаются вопросы оптимального регулирования тока возбуждения для поддержания постоянства cos фи, напряжения на шинах, от которых питается синхронный двигатель, а также ограничение токов ротора и статора синхронного двигателя в аварийных режимах. Если пуск синхронного электродвигателя производится на пониженное напряжение, то при «легком» пуске возбуждение подается до включения обмотки статора на полное напряжение, а при «тяжелом» пуске подача возбуждения происходит при полном напряжении в цепи статора. Возможно подключение обмотки возбуждения двигателя к якорю возбудителя последовательно с разрядным сопротивлением. Процесс подачи возбуждения синхронному двигателю автоматизируется двумя способами: в функции скорости и в функции тока.
№61 Следящий электропривод: общие принципы построения, следящий электропривод с прерывистым управлением, следящий электропривод с непрерывным управлением.
Следящий электропривод.
Следящая система, обеспечивающая воспроизведение некоторых механических перемещений на управляемом объекте посредством исполнительного электродвигателя (ИЭ). С. э. включает в себя задающее устройство, Измерительный преобразователь, орган сравнения, усилитель и ИЭ. Задающее устройство вырабатывает исходный сигнал (изменяющийся, как правило, по произвольному закону). Измерительный преобразователь непрерывно измеряет фактическое значение воспроизводимой величины на управляемом объекте, которое при помощи органа сравнения сопоставляется с заданным. Обычно измерительный преобразователь и орган сравнения объединены в одном устройстве, вырабатывающем электрический сигнал рассогласования (СР), пропорциональный разности между заданным и фактическими значениями воспроизводимой величины. СР (в виде напряжения или тока) поступает на вход усилителя, а затем на ИЭ, осуществляющий такое движение управляемого объекта, при котором СР уменьшается. В отсутствие СР ротор электродвигателя находится в покое.
Различают С. э. с непрерывным и дискретным управлением. Особенностью первого является непрерывное регулирование напряжения (мощности) ИЭ в функции СР. В простейшем случае эта зависимость линейна. С. э. с дискретным управлением подразделяются на релейные и импульсные. В релейных С. э. в качестве усилителя используют бесконтактные Реле, которые при определённой величине СР включают ИЭ на полную мощность. В импульсных С. э. включение ИЭ осуществляется периодически, через определённые (равные) промежутки времени управляющими импульсами тока, амплитуда, длительность или частота которых являются функцией СР.
В большинстве С. э. задаваемой величиной является угол поворота входного вала, а регулируемой — угол поворота выходного вала, с которым связан управляемый объект. В качестве измерительных преобразователей наибольшее распространение в таких устройствах получили Потенциометры и индукционные машины переменного тока типа Сельсинов или поворотных трансформаторов. С. э. находят применение в различных системах управления, передачи информации и измерения.
№62 Электропривод с шаговыми двигателями, линейные и координатные шаговые приводы.
Ша́говый электродви́гатель — это синхронный бесщёточный электродвигатель с несколькими обмотками, в котором ток, подаваемый в одну из обмоток статора, вызывает фиксацию ротора. Последовательная активация обмоток двигателя вызывает дискретные угловые перемещения (шаги) ротора.
Линейный шаговый электродвигатель При возбуждении со стороны ротора - якоря, получаем шаговый двигатель активного типа. Со стороны статора - индукторный, который получил широкое применение. Ход плоского электродвигателя ограничен его длиной. Закрепив индуктор, получим перемещение магнитной системы. В индукторе некоторых электродвигателей профрезированы зубцы. Для уменьшения эксплуатационного зазора и улучшения эксплуатационных показателей линейных шаговых двигателей используются воздушные опоры. Сжатый воздух, проходя через калиброванные отверстия якоря, создает воздушную подушку 15-20 микрон. В ряде случаев предусматривается магнитная фиксация ротора при отключении питания. Разработано большое количество комбинированных электродвигателей. Так сочетание пары электродвигателей перпендикулярно в одной раме образуют планарный электродвигатель. Он может осуществлять двухкоординатное движение на плоскости, являющейся индукторами. Большое усилие притяжения к плите позволяет такому двигателю работать в любом положении. Простота и однотипность физических процессов в шаговых двигателях, их конструктивная пластичность позволили разработать бесконтактные электромеханические и электронные модули, реализующие сложное многокоординатное движение без дорогостоящих и изнашивающихся кинематических преобразователей.
Микропроцессорное управление электроприводом дает возможность выбирать оптимальные режимы работы для разных промышленных установок, гибко перестраивать программы движения, компенсировать систематические погрешности изготовления модулей. Отмеченные особенности делают многокоординатный шаговый привод весьма перспективным для робототехники и построение гибкого автоматизированного производства. Отличительная особенность гибкой автоматизации состоит в совмещении транспортных и технологических операций в одной установке. На основе модульного привода создано новое поколение прецизионной аппаратуры для электронной и других отраслей промышленности.
Координатные При работе двигателя на его индукторе закрепляют три датчика положения: два датчика, например, на координату X и один – на координату Y. Два датчика положения на одной из координат двигателя позволяют по разности их показаний легко установить факт разворота индуктора и, следовательно, бороться При работе двигателя на его индукторе закрепляют три датчика положения: два датчика, например, на координату X и один – на координату Y. Два датчика положения на одной из координат двигателя позволяют по разности их показаний легко установить факт разворота индуктора и, следовательно, бороться посредством соответствующего алгоритма управления с этим нежелательным явлением.
№63 Принципы построения взаимосвязанного электропривода, электропривод низких скоростей, электропривод c электрическим валом.
Взаимосвязанный электропривод содержит два и более электродвигателей, приводящих в движение один и более исполнительных механизмов. При этом, если электродвигатели связаны между собой механически (работают на 1 вал), то электропривод называют многодвигательным. Если же электродвигатели связаны только электрическими цепями, то электропривод называют электрическим валом. Классификация электроприводов по виду электрического силового преобразователя:
управляемые и неуправляемые; с выпрямителем или инвертором; с преобразованием напряжения или частоты; со звеном постоянного или переменного тока , или их совокупностью.
Также весьма разнообразна элементная база силовых преобразователей: электромашинные системы, магнитные усилители, ионные и полупроводниковые элементы. Благодаря вышеотмеченномы рознообразию видов электропривода, он получил широкое применение во всех сферах человеческого общества, начиная от промышленного производства и до бытовых сфер. Этим и определяется исключительно большой диапазон мощностей электроприводов — от долей Вт до десятков МВт. Такие электроприводы применяются в газо- и нефтеперекачивающих станциях, прокатных станах, конвейерах, металлорежущих станках и т.д. В основном, предпочтение в таких случаях отдается индивидуальному автоматизированному электроприводу.
В области низких скоростей в условиях однонаправленности движения в значительной мере проявляется нелинейный характер нагрузки, эбусловленный силами трения. В системах малой мощности занимают бальшое место узлы трения, среди которых наиболее распространенны и являются опоры трения скольжения и качения,зубчатые и винтовые передачи
№64Электропривод с однофазными и двухфазными двигателями. Электропривод с однофазным коллекторным двигателем.
Электропривод основных механизмов пищевой (химической) промышленности.
Однофазные асинхронные двигатели - машины небольшой мощности, которые по конструктивному исполнению напоминают аналогичные трехфазные электродвигатели с короткозамкнутым ротором.
Однофазные асинхронные двигатели отличаются от трехфазных двигателей устройством статора, где в пазах магнитопровода находится двухфазная обмотка, состоящая из основной, или рабочей, фазы с фазной зоной 120 эл. град и выводами к зажимам с обозначениями С1 и С2, и вспомогательной, или пусковой, фазы с фазной зоной 60 эл. град и выводами к зажимам с обозначениями В1 и В2 .
Магнитные оси этих фаз обмотки смещены относительно друг друга па угол 0 = 90 эл. град. Одна рабочая фаза, присоединенная к питающей сети переменного напряжения, не может вызвать вращения ротора, так как ток ее возбуждает переменное магнитное поле с неподвижной осью симметрии, характеризуемое гармонически изменяющейся во времени магнитной индукцией.
В двухфазных асинхронных двигателях обе фазы обмотки статора с фазными зонами по 90 эл. град являются рабочими. Они расположены в пазах магнитопровода статора так, что их магнитные оси образуют угол 90 эл. град. Эти фазы обмотки статора отличаются друг от друга не только числом витков, но и номинальными напряжениями и токами, хотя при номинальном режиме двигателя полные мощности их одинаковы.
В одной из фаз обмотки статора постоянно находится конденсатор Ср, который в условиях номинального режима двигателя обеспечивает возбуждение кругового вращающегося магнитного поля.
Колле́кторный электродви́гатель — электрическая машина, в которой датчиком положения ротора и переключателем тока в обмотках является одно и то же устройство —щёточно-коллекторный узел. Строго говоря, универсальный коллекторный электродвигатель является коллекторным электродвигателем постоянного тока с последовательно включенными обмотками возбуждения (статора), оптимизированным для работы на переменном токе бытовой электрической сети. Такой тип двигателя независимо от полярности подаваемого напряжения вращается в одну сторону, так как за счёт последовательного соединения обмоток статора и ротора смена полюсов их магнитных полей происходит одновременно и результирующий момент остаётся направленным в одну сторону.
Общие достоинства коллекторных двигателей постоянного тока — простота изготовления, эксплуатации и ремонта, достаточно большой ресурс.
К недостаткам можно отнести то, что эффективные конструкции (с большим КПД и малой массой) таких двигателей являются низкомоментыми и быстроходными (сотни и тысячи оборотов в минуту), поэтому для большинства приводов (кроме вентиляторов и насосов) необходимы редукторы. Это утверждение не вполне верно, но обоснованно. Электрическая машина, построенная на низкую скорость, вообще имеет заниженный КПД и связанные с ним проблемы охлаждения. Скорее всего проблема лежит так, что изящных решений для неё нет.
Электропривод основных механизмов пищевой (химической) промышленности. - это электромеханическая система для приведения в движение исполнительных механизмов рабочих машин и управления этим движением в целях осуществления технологического процесса. Современный электропривод — это совокупность множества электромашин, аппаратов и систем управления ими.
№65Электропривод запорной и регулирующей арматуры пищевых (химических) производств.
Регулирующая арматура — это вид трубопроводной арматуры, предназначенный для регулирования параметров рабочей среды. В понятие регулирования параметров входит регулирование расхода среды, поддержания давления среды в заданных пределах, смешивание различных сред в необходимых пропорциях, поддержание заданного уровня жидкости в сосудах и некоторые другие. Выполнение всех своих функций регулирующая арматура осуществляет за счёт изменения расхода среды через своё проходное сечение.
В зависимости от конкретных условий эксплуатации применяются различные виды управления регулирующей арматурой, чаще всего при этом используются внешние источники энергии и управление по команде от датчиков, фиксирующих параметры среды в трубопроводе. Используется также автоматическое управление непосредственно от рабочей среды. В современной промышленности уже редко, но все же встречается, основной способ управления регуляторами в прошлом — ручное управление (см. рисунок справа).
В зависимости от параметров рабочей среды (давления, температуры, химического состава и др.) к каждому виду регулирования предъявляются различные требования, что привело к появлению множества конструктивных типов регулирующей арматуры. С точки зрения автоматизации промышленных предприятий каждый из них рассматривается как элемент системы автоматического управления технологическим процессом, протекающим с участием жидких и газообразных рабочих сред и регулирующимся под воздействием получаемой командной информации.
Электроприводы позволяют осуществлять:
- Закрывание и открывание прохода арматуры с пульта управления нажатием пусковых кнопок и остановку запорного устройства арматуры в любом промежуточном положении нажатием кнопки "стоп".
- Управление электроприводом в двух режимах: дистанционно с пульта управления и на месте вручную.
- Автоматическое отключение электродвигателя муфтой ограничения крутящего момента при достижении заданного крутящего момента на выходном валу в положениях "закрыто", "открыто" или при аварийном заедании подвижных частей в процессе хода на закрывание и открывание.
- Сигнализацию на пульте управления крайних положений запорного устройства арматуры и срабатывания муфты ограничения крутящего момента.
- Автоматическое отключение электродвигателя путевыми выключателями при достижении запорным устройством арматуры крайних положений.
- Местное указание крайних и промежуточных положений запорного устройства арматуры на шкале местного указателя.
- Дистанционное указание степени открытия прохода арматуры на пульте управления (при наличии датчика положений).
- Автоматическое переключение электропривода из положения ручного управления на электрическое или независимое ручное и электрическое управление.
- Электрическую блокировку электропривода с работой других механизмов и агрегатов.
- Регулирование величины крутящего момента в пределах, указанных в таблице.
№66 Электрические исполнительные механизмы
Исполнительным механизмом в системах управления обычно называют устройство, предназначенное для перемещения рабочего органа в соответствии с сигналами, поступающими от управляющего устройства. Рабочими органами могут быть различного рода дроссельные заслонки, клапана, задвижки, шиберы, направляющие аппараты и другие, регулирующие и запорные органы, способные производить изменение количества энергии или рабочего вещества, поступающего в объект управления.
Основными показателями, при выборе исполнительные механизмы по каталогу, являются: номинальный момент и пусковой момент. Номинальный момент – это величина момента сопротивления или усилия, которые исполнительный механизм может преодолевать при номинальном значении управляющего сигнала. Пусковой момент – это максимальное значение крутящего момента или усилия, развиваемого исполнительным механизмом в момент включения под действием номинальной величины управляющего сигнала. Для уменьшения времени разгона пусковой момент исполнительного механизма обычно в 2 – 2,5 раза превышает номинальный момент.
Механизмы ПР (поступательно регулирующий):
Для дозирующих устройств с поступательным перемещением регулирующего органа можно применять исполнительные механизмы типа ПР . Ход штока составляет 19 мм. Эти устройства пригодны и для осуществления вращательного движения. Максимальный угол поворота составляет 180°.
Механизмы ИМ (исполнительный механизм):
При вращательном движении регулирующего органа можно применять исполнительные механизмы серий ИМ , различные модификации которых позволяют получить угол поворота в пределах от 0 до 360° при вращающем моменте от 2 до 100 кгс ■ м. Имеются также многооборотные варианты этих серий.
Исполнительные механизмы типов ПР и серий ИМ и ИМТ могут применяться только при горизонтальном положении выходного вала.
Механизм электромеханический многооборотный МЭМ:
Назначение: Механизм исполнительный электрический многоборотный МЭМ предназначен для перемещения регулирующих органов самотормозящейся запорно-регулирующей арматуры в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами, поступающими от регулирующих и управляющих устройств. Механизм устанавливается непосредственно на трубопроводной арматуре. Пространственное положение механизмов - любое, определяемое положением трубопроводной арматуры. Управление механизмами - контактное или бесконтактное.
Механизм электромеханический прямоходный МЭП:
Предназначены для перемещения затворных частей исполнительн0ых звеньев (запорно-регулирующих клапанов и регулирующих гидроэлеваторов) по сигналу управления от управляющего звена. Механизмы могут комплектоваться дополнительными функциями для отслеживания положения затвора исполнительного звена и выдачи дополнительных сигналов при определенном положении затворных частей арматуры.
Механизм электрический однооборотный МЭО:
Однооборотные (или неполноповоротные) электрические исполнительные механизмы и приводы МЭО предназначены для передачи крутящего момента арматуре при ее повороте на один оборот или менее (от 0 до 360°).Механизмы МЭО предназначены для приведения в действие запорно-регулирующей арматуры в системах автоматического регулирования технологическими процессами, в соответствии с командными сигналами регулирующих и управляющих устройств.
Механизм электромеханический однооборотный МЭК:
Механизмы исполнительные электрические однооборотные постоянной скорости МЭК предназначены для перемещения регулирующих органов в системах автоматического регулирования технологическими процессами в соответствии с командными сигналами автоматических регулирующих и управляющих устройств. Принцип работы механизмов заключается в преобразовании электрического сигнала поступающего от регулирующего или управляющего устройства во вращательное перемещение выходного вала.
№67 Расчет электропривода насосов, компрессоров и вентиляторов
Расчет мощности электропривода насоса:
Р=k3QHρg*10-3/(3600*ηнηп) , где k3-коэффициент запаса (k3= 1,1-1,5), Q-подача насоса, H-полный напор, ρ-плотность перекачиваемой жидкости, g=9,81 – ускорение свободного падения, ηн – КПД насоса, ηп- КПД передачи
Электропривод насоса выбирается по каталогу в соответствия рассчитанной мощностью.
Расчет мощности электропривода компрессора:
Р=k3QА*10-3/ηкηп , где k3-коэффициент запаса (k3= 1,1-1,5), Q-производительность компрессора, А-работа изотермического и адиабатического сжатия одного метра кубического атмосферного воздуха давлением 0,1 МПа до требуемого давления Р2 , ηк – КПД компрессора, ηп- КПД передачи
Электропривод компрессора выбирается по каталогу в соответствия рассчитанной мощностью.
Расчет мощности электропривода вентилятора:
Р=k3QН*10-3/(3600*ηвηп) , где k3-коэффициент запаса (k3= 1,1-1,2 при мощности 5 кВт, k3= 1,5 – при мощности до 2кВт, k3= 2,0 при мощности до 1кВт), Q-подача вентилятора, Н-полный напор , ηв – КПД вентилятора, ηп- КПД передачи
Электропривод вентилятора выбирается по каталогу в соответствия рассчитанной мощностью.
№68 Расчет электропривода мешалок.
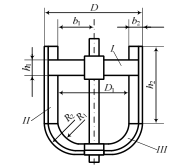
Рамную мешалку можно рассматривать как сочетание горизонтальных лопастей ǀ , вертикальных лопастей ǁ и сферической (опорной) части ǀǀǀ . Для расчета мощности электродвигателя мешалки следует сперва найти :
Мощность вращения горизонтальных лопастей : PГ=60*10-8*kл zFлD3n3ρ/η
где kл- коэффициент , зависит от формы лопастей (определяется по таблице), z – число пар горизонтальных лопастей, Fл=b1h1sinβ, β- угол наклона лопастей к направлению вращения (для горизонтальных лопастей sinβ=1 ), D-диаметр окружности описываемый горизонтальной лопастью, n – частота вращения, ρ- плотность жидкости.
Мощность вращения вертикальных лопастей : Pв=18*10-8*kл zh2(D24-D14)n3ρ/η
где kл- коэффициент , зависит от формы лопастей (определяется по таблице), z – число пар вертикальных лопастей, h2- высота вертикальной лопасти, D2=D-2b2 , D2=D – диаметр окружности, описываемый вертикальной лопастью, n – частота вращения, ρ- плотность жидкости.
Мощность вращения сферической части: Pс=15*10-7*kл z(R25-R15)n3ρ/η
где kл- коэффициент , зависит от формы лопастей (определяется по таблице), z – число пар лопастей сфирической части, R2=R-b2 , R2 –радиус сферической части, n – частота вращения, ρ- плотность жидкости.
Суммарная мощность по валу привода Pм= PГ +PГ + PГ
Мощность с учетом запаса (kз=1,15) : P= kзPм
Электродвигатель выбирается по каталогу по мощность равной или немного большей рассчитанной P .
№69 Расчет электропривода центрифуг.
Расчет двигателя для привода центрифуги по периодическому действию производится по пусковому режиму. Ообщая мощность необходимая для пуска центрифуги, рассчитывается по формуле : P= P1 +P2 + P3+ P4
где P1-мощность, затрачиваемая на преодоление инерции барабана, P2- мощность, затрачиваемая на приодоление инерции материала, Р3 – мощность затрачиваемая на преодоление трения в подшипниках вала, Р4- мощность трения барабана о воздух.
Р1 = mбν2/2000τn , где mб - масса барабана, ν – скорость барабана
Р2 = 1,86Vб ρc ν2/1000τn , где Vб - объем барабана, ν – скорость барабана, ρc –плотность суспензии в барабане
Р3 = fmΣ g νв/1000 , где mΣ -суммарная масса узлов, опирающихся на подшипники, νв–окружная скорость вала, g–ускорение свободного падения 9,81 м/с2
Р4=(D/2)5n3 *10-8 – мощность трения барабана о воздух
Динамический момент : М = 9550Р/n
Электродвигатель выбирается по каталогу в соответствия рассчитанной мощностью.
№70 Основные особенности электроприводов.
В современном промышленном производстве, коммунальном хозяйстве и в других областях наибольшее применение находит электропривод (электрический привод).
Такое широкое применение электропривода объясняется целым рядом его преимуществ по сравнению с другими видами приводов: использование электрической энергии, распределение и преобразование которой в другие виды энергии, в том числе и в механическую, наиболее экономично; большой диапазон мощности электроприводов и скорости их движения; разнообразие конструктивных исполнений, что позволяет рационально сочленять привод с исполнительным органом рабочей машины и использовать для работы в различных условиях - в воде, среде агрессивных жидкостей и газов, космическом пространстве; простота автоматизации технологических процессов; высокий КПД и экологическая чистота.