

1. Генераторное торможение
Машина переходит в режим генератора, если n>n0, т.е. если ротор вращается быстрее магнитного поля. Этот режим может наступить при регулировании скорости вращения увеличением числа пар полюсов или уменьшением частоты источника питания, а также в подъемно-транспортных машинах при опускании груза, когда под действием силы тяжести груза ротор начинает вращаться быстрее магнитного поля.
В режиме генератора изменяется направление электромагнитного момента, т.е. он становится тормозным, под действием чего происходит быстрое снижение скорости вращения. Одновременно изменяется фаза тока в обмотке статора, что приводит к изменению направления передачи электрической энергии. В режиме генератора происходит возврат энергии в сеть.
2. Динамическое торможение
Этот тормозной режим используется для точной остановки мощных двигателей. На время торможения обмотка статора отключается от сети переменного напряжения и подключается и источнику с постоянным напряжением. При этом обмотка статора будет создавать постоянное неподвижное магнитное поле. При вращении ротора относительно этого магнитного поля изменяется направление ЭДС и тока ротора, что приведет к изменению направления электромагнитного момента, т.е. он станет тормозным. Под действием этого момента происходит торможение. Изменяя величину подведенного к обмотке статора напряжения, можно регулировать время торможения. Основным достоинством этого тормозного режима является точная остановка. Постоянное напряжение можно подводить к обмотке статора только на время торможения. После остановки двигатель нужно отключить от сети постоянного тока.
3. Торможение противовключением
Этот тормозной режим возникает при реверсе двигателя, а также широко используется для быстрой остановки двигателя.
Достоинством этого тормозного режима является быстрое торможение, т.к. тормозной момент действует на всем тормозном пути. Недостатки: большие токи и потери в обмотках при торможении, необходима аппаратура, контролирующая скорость вращения и отключающая двигатель от сети при его остановке. Если в приводе механизма двигатель часто работает в режиме реверса, приходится завышать его мощность из-за больших потерь мощности.
Типовые схемы торможения.
Динамическое торможение осуществляется отключением двигателя от сети трехфазного тока и подсоединением обмотки статора к сети постоянного тока. Магнитный поток в обмотках статора, взаимодействуя с током ротора, создает тормозной момент.
На рис. 1.18 приведена схема прямого пуска асинхронного двигателя с динамическим торможением в функции времени. Двигатель запускается с помощью контактора КМ1. Одновременно замыкается цепь питания реле времени КТ (при включенном автоматическом выключателе QF), так как блок-контакт КМ1 в цепи реле времени замыкается. Контакт реле времени замкнется, но контактор КМ2 не получит питания, поскольку разомкнётся контакт контактора КМ1 в цепи контактора КМ2.
Для остановки двигателя нажимается кнопка SB2 «Стоп». Контактор КМ1 обесточивается, размыкая свои контакты в силовой цепи двигателя. Одновременно с этим замыкается контакт КМ1 в цепи контактора КМ2, вследствие чего контактор КМ2 срабатывает и замыкает свои силовые контакты в цепи постоянного тока. Обмотка статора двигателя отключается от трехфазной сети и подключается к сети постоянного тока. Двигатель переходит в режим динамического торможения. В схеме применено реле времени с выдержкой времени при размыкании. При скорости, близкой к нулю, контакт КТ размыкается, вследствие чего контактор КМ2 обесточивается и двигатель отключается от сети.
Интенсивность торможения регулируется с помощью резистора R. В схеме применена блокировка с помощью размыкающих контактов КМ1 и КМ2 для невозможности включения статора двигателя одновременно в сеть постоянного и трехфазного тока.
Р ис.
1.18. Схема
управления асинхронным двигателем с
короткозамкнутым ротором с динамическим
торможением в функции времени.
ис.
1.18. Схема
управления асинхронным двигателем с
короткозамкнутым ротором с динамическим
торможением в функции времени.
Торможение противовключением.
На рис. 1.20 приведена схема управления асинхронным двигателем с торможением противовключением. Она работает следующим образом. Подача напряжения на схему осуществляется включением автоматического выключателя QF. Для пуска электродвигателя используется кнопка SB1 и контактор КМ1. Одновременно замыкается контакт SR реле контроля скорости, но контактор КМ2 не включен, так как при включении контактора КМ1 размыкается его контакт в цепи контактора КМ2. Для торможения нажимается кнопка SB2 «Стоп», контактор КМ1 теряет питание, вследствие чего замыкается контакт КМ1 в цепи контактора КМ2, который, срабатывая, подключает двигатель к сети с изменением порядка чередования фаз. Происходит торможение двигателя в режиме противовключения. При скорости, близкой к нулю, контакт SR реле контроля скорости размыкается и отключает контактор КМ2. Двигатель останавливается. Схема имеет электрическую блокировку, чтобы невозможно было одновременно включить контакторы КМ2 и КМ1.
Р ис.
1.20. Схема
управления асинхронным двигателем с
короткозамкнутым ротором с торможением
противовключением
ис.
1.20. Схема
управления асинхронным двигателем с
короткозамкнутым ротором с торможением
противовключением
№24Конструкция и принцип действия синхронного двигателя. Механическая и угловая характеристика синхронного двигателя.
Синхронные двигатели. Конструкция, принцип действия
В отличие от асинхронного двигателя частота вращения синхронного двигателя постоянна при различных нагрузках. Синхронные двигатели находят применение для привода машин постоянной скорости (насосы, компресоры, вентиляторы).
В статоре синхронного электродвигателя размещается обмотка, подключаемая к сети трехфазного тока и образующая вращающееся магнитное поле. Ротор двигателя состоит из сердечника с обмоткой возбуждения. Обмотка возбуждения через контактные кольца подключается к источнику постоянного тока. Ток обмотки возбуждения создает магнитное поле, намагничивающее ротор.
Роторы синхронных машин могут быть явнополюсными (с явновыраженными полюсами) и неявнополюсными (с неявновыраженными полюсами). На рис. 1а изображен сердечник 1 явнополюсного ротора с выступающими полюсами. На полюсах размещены катушки возбуждения 2. На рисунке 1б изображен неявнополюсной ротор, представляющий собой ферромагнитный цилиндр 1. На поверхности ротора в осевом направлении фрезеруют пазы, в которые укладывают обмотку возбуждения 2.
 Рис.
1
Рис.
1
Рассмотрим принцип работы синхронного двигателя на модели (рис. 11).
|
Вращающееся магнитное поле статора представим в виде магнита 1. Намагниченный ротор изобразим в виде магнита 2. Повернем магнит 1 на угол α. Северный магнитный полюс магнита 1 притянет южный полюс магнита 2, а южный полюс магнита 1 - северный полюс магнита 2. Магнит 2 повернется на такой же угол α. Будем вращать магнит 1. Магнит 2 будет вращаться вместе с магнитом 1, причем частоты вращения обоих магнитов будут одинаковыми, синхронными, n2 = n1. |
 Рис.
11
Рис.
11Если к вращающемуся ротору приложить тормозной момент, ось магнитного поля ротора повернется на угол θ относительно оси магнитного поля статора.
С увеличением нагрузки этот угол возрастает. Если нагрузка превысит некоторое допустимое значение, двигатель остановится, выпадет из синхронизма.
У синхронных двигателей отсутствует пусковой момент. Это объясняется тем, что электромагнитный вращающий момент, воздействующий на неподвижный ротор, меняет свое направление два раза за период Т переменного тока. Из-за своей инерционности, ротор не успевает тронуться с места и развить необходимое число оборотов.
В настоящее время применяется асинхронный пуск синхронного двигателя. В пазах полюсов ротора укладывается дополнительная короткозамкнутая обмотка.
Вращающее магнитное поле статора индуктирует в короткозамкнутой пусковой обмотке вихревые токи. При взаимодействии этих токов с магнитным полем статора образуется асинхронный электромагнитный момент, приводящий ротор во вращение. Когда частота вращения ротора приближается к частоте вращения статорного поля, двигатель втягивается в синхронизм и вращается с синхронной скоростью. Короткозамкнутая обмотка не перемещается относительно поля, вихревые токи в ней не индуктируются, асинхронный пусковой момент становится равным нулю.
Механическая и угловая характеристики синхронного двигателя
Синхронные двигатели ,если они работают при постоянной частоте с неизменной угловой скоростью ,применяются для приводов ,не требующих регулирования скорости . К таким приводам относятся :компрессоры , холодильные машины,
Рис.3.29 Схема включения (а) и механическая
характеристика (б)синхронного двигателя
Рис.3.30 Пусковые характеристики
синхронного двигателя
камнедробилки и т. п. Основное достоинство синхронного двигателя, заключающееся в возможности работать с высоким коэффициентом мощности, приводит все более широкому применению этого двигателя. Угловая скорость синхронного двигателя к (рис. 3.29, б) при работе в установившемся режиме с возрастанием нагрузки на валу до определенного значения, не превышающего максимального момента Ммах, остается строго постоянной и равна синхронной угловой скорости:
![]()
Электромагнитный момент равен
![]() (3.48)
(3.48)
В случае явнополюсной машины появляется еще дополнительный реактивный момент. Однако для практических расчетов им можно пренебречь и пользоваться формулой (3.48).
При
![]() = 90° момент имеет максимальное значение:
= 90° момент имеет максимальное значение:
![]() (3.49)
(3.49)
Поэтому искомое уравнение угловой характеристики принимает следующий вид:
![]() (3.50)
(3.50)
С увеличением нагрузки угол возрастает. Из (3.50) видно, что вначале с увеличением угла растет и развиваемый двигателем момент (рис. 3.33), что удовлетворяет требованию устойчивой работы двигателя. В правой части графика при > 90° условие устойчивой работы двигателя нарушается, так как при
Рис.3.33 Угловая характеристика синхронного
двигателя
Рис.3.34 Принципиальная схема включения
синхронного двигателя при динамическом
торможении
увеличении нагрузки угол продолжает возрастать, а момент, развиваемый двигателем, уменьшается, вследствие чего двигатель выпадает из синхронизма. Левая часть характеристики является рабочей частью, а правая, где угол изменяется от 90 до 180°, представляет собой неустойчивую часть характеристики.
Номинальному
моменту двигателя Мном
практически
соответствует
угол
НОМ
==30![]() 25°.
При этом кратность максимального
момента к номинальному составляет:
25°.
При этом кратность максимального
момента к номинальному составляет:
![]() .
.
Однако в специальных случаях применяют синхронные машины и с большей кратностью максимального момента, достигающей 3,5—4.
Синхронный двигатель может работать и в режиме генератора параллельно с сетью при синхронной угловой скорости, когда нагрузочный момент на его валу будет иметь отрицательное значение, чему отвечает левая ветвь характеристики на рис. 3.29. Для торможения такой режим практического значения не имеет, так как при этом нельзя получить снижения скорости.
Обычно применяется динамическое торможение синхронных двигателей, при котором обмотки статора отключаются от сети и замыкаются на резисторы (рис. 3.34). Механические характеристики в этом случае подобны характеристикам асинхронного двигателя при динамическом торможении. Интенсивность торможения зависит от сопротивления статорной цепи и от потока, создаваемого током роторной обмотки.
№25 Основные показатели качества регулирования скорости электропривода.
Основными показателями, характеризующими различные способы регулирования скорости электроприводов, являются: 1) диапазон регулирования; 2) плавность; 3) экономичность; 4) стабильность скорости; 5) направление регулирования скорости (уменьшение или увеличение ее относительно основной скорости); 6) допустимая нагрузка при различных скоростях.
1.
Диапазон
регулирования угловой скорости
определяется
отношением возможных установившихся
скоростей!
максимальной
![]() к
минимальной
к
минимальной
![]()
![]() :
:
при заданной точности регулирования (с заданным статическим падением скорости электропривода) для установленных пределов изменения момента нагрузки и других возмущений.
2.Плавность регулирования характеризует скачок скорости при переходе от данной скорости к ближайшей возможной. Плавность тем выше, чем меньше этот скачок. Число скоростей, получаемых в данном диапазоне, определяется плавностью регулирования. Ее можно оценить коэффициентом плавности регулирования, который находится как отношение двух соседних значений угловых скоростей при регулировании
![]()
где![]() -
и
-
и![]() —
угловые скорости соответственно на i-й
и
(i-
1)-й ступенях регулирования.
—
угловые скорости соответственно на i-й
и
(i-
1)-й ступенях регулирования.
При
плавном регулировании
![]() ,
а число скоростей z
,
а число скоростей z![]() .
В случае ступенчатого регулирования
коэффициент
плавности регулирования может существенно
отличаться
от единицы. Число скоростей, диапазон
регулирования D
и
коэффициент плавности регулирования
при таком регулировании связаны
между собой равенством
.
В случае ступенчатого регулирования
коэффициент
плавности регулирования может существенно
отличаться
от единицы. Число скоростей, диапазон
регулирования D
и
коэффициент плавности регулирования
при таком регулировании связаны
между собой равенством
![]() .
.
Плавность
регулирования во многих случаях
определяет качество
продукции. В практике электропривода
наименьшей
плавностью регулирования обладают
двухскоростные асинхронные
двигатели с короткозамкнутым ротором
(![]() =
2). Высокая плавность регулирования
угловой скорости достигается, например,
в двигателе постоянного тока независимого
возбуждения при регулировании изменением
потока
или подводимого к якорю двигателя
напряжения.
=
2). Высокая плавность регулирования
угловой скорости достигается, например,
в двигателе постоянного тока независимого
возбуждения при регулировании изменением
потока
или подводимого к якорю двигателя
напряжения.
3. Экономичность регулирования характеризуется затратами на сооружение и эксплуатацию электропривода.
Необходимо отметить, что экономически выгодным оказывается такой регулируемый электропривод, который обеспечивает большую производительность приводимого им в действие механизма при высоком качестве технологического процесса и сравнительно быстро окупается.
При
оценке экономичности регулируемого
электропривода следует принимать
во внимание надежность его в эксплуатации,
а также учитывать дефицитность материалов
и оборудования,
затрачиваемых на сооружение того или
иного привода.
Существенное значение имеют потери
энергии в
процессе регулирования. Потери мощности
![]() Р,
возникающие
при регулировании скорости, определяют
КПД привода:
Р,
возникающие
при регулировании скорости, определяют
КПД привода:
![]()
где Р2 — мощность на валу двигателя.
При работе двигателя на разных угловых скоростях следует подсчитывать так называемый средневзвешенный КПД за регулировочный цикл, состоящий из m ступеней, по выражению
![]() .
.
где Р2q и Рq — полезная мощность и потери на q-й ступени; tq — время, в течение которого двигатель работает на, q-й ступени.
Потери энергии при регулировании скорости различны для разных способов регулирования. Они сравнительно велики в системах, где регулирование ведется в главных цепях машин, и значительно ниже при регулировании в цепях возбуждения. Последнее становится понятным, если вспомнить, что мощность цепи возбуждения, например, машин постоянного тока составляет лишь 1—5 % мощности главных цепей.
Важным экономическим показателем электропривода является коэффициент мощности и потребление реактивной энергии за рабочий цикл. В случае двигателя переменного тока сдвиг фаз между током и напряжением сети обусловливается потреблением реактивной мощности, затрачиваемой на создание магнитного потока.
Зная потребляемые двигателем активную Ра и реактивную Рр мощности, можно определить коэффициент мощности, с которым в данный момент работает двигатель:
![]() ,
,
и
средневзвешенный cos![]() р
при работе на разных угловых скоростях
с разным временем и с различными
нагрузками в течение цикла регулирования:
р
при работе на разных угловых скоростях
с разным временем и с различными
нагрузками в течение цикла регулирования:
•![]() .
.
Номинальный коэффициент мощности для большинства двигателей составляет cos ном = 0,8. 0,9 и зависит от мощности двигателя. С ростом мощности и номинальной угловой скорости двигателя повышается номинальный коэффициент мощности. Коэффициент мощности асинхронного двигателя в сильной степени зависит от нагрузки; при холостом ходе коэффициент мощности мал вследствие значительной реактивной мощности, затрачиваемой на создание потока, и малой активной мощности, связанной лишь с постоянными потерями. По мере роста нагрузки примерно до номинальной активная мощность растет быстрее реактивной и cos возрастает до номинального значения.
Коэффициент мощности синхронного двигателя также зависит от нагрузки, однако он может быть изменен при регулировании тока возбуждения. При меньшем токе возбуждения синхронный двигатель является потребителем реактивной мощности. С увеличением тока возбуждения возрастает cos . При дальнейшем увеличении тока возбуждения синхронный двигатель может работать в качестве генератора реактивной мощности.
Широкое использование управляемых полупроводниковых преобразователей для регулирования угловой скорости двигателей постоянного и переменного тока приводит к искажению формы первичного напряжения и тока и к значительному возрастанию потребляемой из сети реактивной мощности. Коэффициент мощности примерно равен:
![]()
где
![]() —
минимальная угловая скорость идеального
холостого
хода, соответствующая наибольшему углу
регулирования
—
минимальная угловая скорость идеального
холостого
хода, соответствующая наибольшему углу
регулирования
![]() ;
;
![]() то же при
= 0.
то же при
= 0.
4. Стабильность угловой скорости характеризуется изменением угловой скорости при заданном отклонении момента нагрузки и зависит от жесткости механической характеристики; она тем выше, чем больше жесткость характеристики.
Рис.4.1 Иллюстрация изменения угловой
скорости для механических характеристик
различной жесткости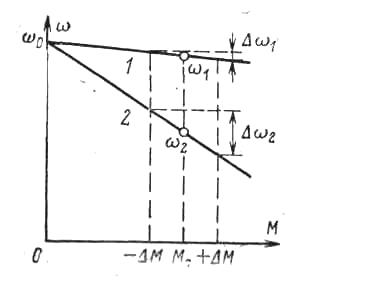
Если при регулировании угловой скорости жесткость характеристики изменяется, то и отклонение скорости от заданной тоже будет изменяться. На рис. 4.1 приведены две характеристики двигателя постоянного тока параллельного возбуждения при регулировании угловой скорости введением резисторов в цепь якоря.
Если
при этом момент сопротивления Мс
остается
неизменным,
то двигатель, работавший ранее с угловой
скоростью
![]() ,-
будет после введения дополнительного
резистора в цепь якоря работать с угловой
скоростью
,-
будет после введения дополнительного
резистора в цепь якоря работать с угловой
скоростью
![]() 2.
Однако при наличии
изменений нагрузочного момента в
некоторых пределах (±
M)
угловая
скорость двигателя не остается постоянной,
она изменяется относительно средних
значений
или
2.
Отклонения угловой скорости
2.
Однако при наличии
изменений нагрузочного момента в
некоторых пределах (±
M)
угловая
скорость двигателя не остается постоянной,
она изменяется относительно средних
значений
или
2.
Отклонения угловой скорости
![]() ,
вызванные
изменениями нагрузки, будут тем больше,
чем меньше жесткость
характеристики. Это обстоятельство во
многих случаях
ограничивает диапазон регулирования
скорости.
,
вызванные
изменениями нагрузки, будут тем больше,
чем меньше жесткость
характеристики. Это обстоятельство во
многих случаях
ограничивает диапазон регулирования
скорости.
5. Направление регулирования скорости, т. е. уменьшение или увеличение ее по отношению к основной скорости, зависит от способов регулирования.
Основная угловая скорость, например, двигателя постоянного тока независимого возбуждения соответствует номинальным значениям напряжения и магнитного потока. Эта скорость получается в том случае, когда в цепях двигателя нет никаких внешних резисторов, т. е. точка осн находится на естественной механической характеристике.
Различают однозонное регулирование вниз от основной скорости, однозонное регулирование вверх от основной скорости и двухзонное регулирование, когда имеется возможность получать характеристики выше и ниже естественной.
6. Допустимая нагрузка двигателя, т. е. наибольшее значение момента, который двигатель способен развивать длительно при работе на регулировочных характеристиках, определяется нагревом двигателя и для разных способов регулирования будет различной.
Изменение нагрузочного момента в зависимости от скорости у различных производственных механизмов различно. Например, многие механизмы требуют регулирования при постоянном моменте. К ним относятся: подъемные краны, лебедки, некоторые прокатные станы и т. п. С другой стороны, существуют механизмы, у которых регулирование скорости производится с постоянной мощностью. В качестве примеров подобного механизма можно привести токарный станок, у которого в процессе обработки данной детали желательно поддержание постоянства линейной скорости (или скорости резания) и усилия резания. При этих условиях произведение скорости резания на усилие даст постоянство, мощности. Поддержание постоянства скорости резания достигается плавным регулированием угловой скорости электропривода.
№31 Испытание двигателя постоянного тока независимого возбуждение методом нагрузочного генератора
Уравнение механической характеристики двигателя постоянного тока независимого (параллельного) возбуждения имеет вид

где: n0 - частота вращения вала двигателя при холостом ходе. Δn - изменение частоты вращения двигателя под действием механической нагрузки.
Из этого уравнения следует, что механические характеристики двигателя постоянного тока независимого (параллельного) возбуждения (ДПТ НВ) прямолинейны и пересекают ось ординат в точке холостого хода n0 (рис 13.13 а), при этом изменение частоты вращения двигателя Δn, обусловленное изменением его механической нагрузки, пропорционально сопротивлению цепи якоря Rа =∑R + Rдоб. Поэтому при наименьшем сопротивлении цепи якоря Rа = ∑R, когда Rдоб = 0, соответствует наименьший перепад частоты вращения Δn. При этом механическая характеристика становится жесткой.
При оценке регулировочных свойств двигателей постоянного тока наибольшее значение имеют механические характеристики n = f(M). При неизменном моменте нагрузки на валу двигателя с увеличением сопротивления резистора Rдоб частота вращения уменьшается. Сопротивления резистора Rдоб для получения искусственной механической характеристики, соответствующей требуемой частоте вращения n при заданной нагрузке (обычно номинальной) для двигателей независимого (параллельного) возбуждения:

где U — напряжение питания цепи якоря двигателя, В; Iя — ток якоря, соответствующий заданной нагрузке двигателя, А; n — требуемая частота вращения, об/мин; n0 — частота вращения холостого хода, об/мин.
Частота вращения холостого хода n0 представляет собой пограничную частоту вращения, при превышении которой двигатель переходит в генераторный режим. Эта частота вращения превышает номинальную nном на столько, на сколько номинальное напряжение Uном подводимое к цепи якоря, превышает ЭДС якоря Ея ном при номинальной нагрузки двигателя.

откуда:

На форму механических характеристик двигателя влияет величина основного магнитного потока возбуждения Ф. При уменьшении Ф (при возрастании сопротивления резистора rpeг) увеличивается частота вращения холостого хода двигателя n0 и перепад частоты вращения Δn. Это приводит к значительному изменению жесткости механической характеристики двигателя (рис. 13.13, б). Если же изменять напряжение на обмотке якоря U (при неизменных Rдоб и Rрег), то меняется n0, a Δn остается неизменным [см. (13.10)]. В итоге механические характеристики смещаются вдоль оси ординат, оставаясь параллельными друг другу (рис. 13.13, в). Это создает наиболее благоприятные условия при регулировании частоты вращения двигателей путем изменения напряжения U, подводимого к цепи якоря. Такой метод регулирования частоты вращения получил наибольшее распространение еще и благодаря разработке и широкому применению регулируемых тиристорных преобразователей напряжения.
№32 Способы регулирования угловой скорости двигателя постоянного тока последовательного возбуждения
возможны три способа регулирования его угловой скорости:
1) регулирование за счет изменения величины сопротивления реостата в цепи якоря,
2) регулирование за счет изменения потока возбуждения двигателя Ф,
3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.
Рассмотрим первый способ регулирования скорости двигателя постоянного тока изменением сопротивления в цепи якоря
Изменяя сопротивление реостата в цепи якоря можно получить при номинальной нагрузке различные угловые скорости электродвигателя на искусственных характеристиках — ω1, ω2, ω3.
Проведем анализ данного способа регулирования угловой скорости двигателей постоянного тока с помощью основных технико-экономических показателей. Так как при данном способе регулирования изменяется жесткость характеристик в широких пределах, то при скоростях менее половины номинальной стабильность работы двигателя резко ухудшается. По этой причине диапазон регулирования скорости ограничен (D= 2 -З).
Скорость при данном способе можно регулировать в сторону уменьшения от основной, о чем свидетельствуют электромеханические и механические характеристики. Высокую плавность регулирования трудно обеспечить, так как потребовалось бы значительное количество ступеней регулирования и соответственно большое число контакторов. Полное использование двигателя по току (нагреву) в этом случае достигается при регулировании с постоянным моментом нагрузки.
Недостатком рассматриваемого способа является наличие значительных потерь мощности при регулировании, которые пропорциональны относительному изменению угловой скорости. Достоинством рассмотренного способа регулирования угловой скорости являются простота и надежность схемы управления.
При втором способе регулирование угловой скорости двигателей постоянного тока независимого возбуждения осуществляется изменением величины магнитного потока за счет введения в цепь обмотки возбуждения дополнительного реостата. При ослаблении потока угловая скорость двигателя как при нагрузке, так и при холостом ходе возрастает, а при усилении потока — уменьшается. Практически возможно изменение скорости только в сторону увеличения ввиду насыщения двигателя.
Обмотки возбуждения двигателей постоянного тока независимого возбуждения обладают значительной индуктивностью. Поэтому при ступенчатом изменении сопротивления реостата в цепи обмотки возбуждения ток, а следовательно, и поток будут изменяться по экспоненциальному закону. В связи с этим регулирование угловой скорости будет осуществляться плавно.
Третий способ регулирования скорости заключается в изменении напряжения, подводимого к обмотке якоря двигателя. Угловая скорость двигателя постоянного тока независимо от нагрузки изменяется прямо пропорционально напряжению, подводимому к якорю. Поскольку все регулировочные характеристики являются жесткими, а степень их жесткости остается для всех характеристик неизменной, работа двигателя является стабильной на всех угловых скоростях и, следовательно, обеспечивается широкий диапазон регулирования скорости независимо от нагрузки. Этот диапазон равен 10 и может быть расширен за счет специальных схем управления.
№33 Реостатное и импульсное регулирование угловой скорости асинхронного двигателя Реостатное регулирование угловой скорости асинхронных двигателей
Введение резисторов в цепь ротора (реостатное регулирование) позволяет, как и для двигателей постоянного тока, регулировать угловую скорость двигателя. Регулирование осуществляется вниз от основной угловой скорости. Плавность регулирования зависит от числа ступеней включаемых резисторов.
Для асинхронных двигателей с фазным ротором применяется регулирование скорости путем изменения сопротивлений в цепи ротора, а для двигателей с короткозамкнутым ротором используются сопротивления в цепи статора, как это показано на рис. 6.1
 а)
а)  б)
б)
Рисунок 6.1–Схемы включения резисторов в цепь ротора а) и статора б)

 (6-1)
(6-1)
Согласно выражениям (6-1) при увеличении активного сопротивления вторичной цепи увеличивается критическое скольжение, и механическая характеристика становится более мягкой (см. рис. 6.2).


а) б)
Рисунок 6.2 – Механические характеристики асинхронного двигателя при регулировании скорости изменением сопротивления в цепи ротора а) и статора б)
При
увеличении скольжения в 2 раза по
сравнению с номинальным, т. е. при снижении
скорости всего лишь на 8![]() 15%,
допустимый момент уменьшается в 2 раза.
По этой причине диапазон регулирования
обычно не превышает (1,5
2):1.
15%,
допустимый момент уменьшается в 2 раза.
По этой причине диапазон регулирования
обычно не превышает (1,5
2):1.
При неизменном моменте нагрузки и реостатном управлении потери мощности в роторной цепи изменяются пропорционально скольжению, а потери в статоре не зависят от скольжения и остаются неизменными при данном моменте нагрузки. Если, например, скорость двигателя снижена вдвое по сравнению с номинальной, то примерно половина всей потребляемой из сети мощности теряется в регулировочных резисторах. Следовательно, с ростом регулировочного сопротивления при одном и том же скольжении снижается к. п. д.
К недостаткам реостатного регулирования скорости относятся также мягкость механических характеристик и зависимость диапазона регулирования от величины нагрузки. В частности, регулирование скорости на холостом ходу практически невозможно.
Реостатное регулирование скорости асинхронного двигателя с фазным ротором продолжает находить практическое применение при невысоких требованиях к точности регулирования.
Реостатное регулирование благодаря своей простоте находит практическое применение, например, в приводе подъемно-транспортных устройств, вентиляторов и насосов малой и средней мощности (до 100 кВт)