

№1 Электропривод как средство автоматизации технологических процессов и производств. Обобщённая функциональная схема автоматизированного электропривода и её основные элементы. Классификация электроприводов.
Электроприводом
(часто автоматизированным) называется
электромеханическое устройство,
предназначенное для приведения в
движение рабочих органов машин и
управления их технологическими
процессами, состоящий из передаточного
устройства, электродвигателя,
преобразовательного и управляющего
устройств. Особенность АЭП состоит в
том, что переработка информации,
необходимая для управления потоками
энергии, осуществляется автоматически.
Благодаря применению АЭП человек
освобождается не только от тяжелого
физического труда, но с него снимаются
также функции соответствующей переработки
информации. Выделяют три основных
элемента: 1) механическая часть привода,
включающая передаточный механизм и
исполнительный механизм (он же РО).
Предназначена для передачи механической
энергии к исполнительному органу рабочей
машины и для изменения вида и скорости
движения и усилия (момента вращения).
2) электродвигательное устройство (ЭМП),
предназначенное для преобразования
электрической энергии в механическую
или механическую в электрическую. 3)
система управления (управляющее
устройство), состоящая из силовой
преобразовательной части, управляющего
устройства, задающего устройства и
датчиков обратных связей. Интеллектуальная
часть электропривода. Рис.
1.1. Структурная схема автоматизированного
электропривода 1.4. Классификация типов
электроприводов

КЛАССИФИКАЦИЯ ЭЛЕКТРОПРИВОДОВ
По виду движения различаются электроприводы вращательного и поступательного однонаправленного и реверсивного движения, а также электроприводы возвратно-поступательного движения. Эти движения могут иметь как непрерывный, так и дискретный характер.
По принципам регулирования скорости и положения электропривод может быть: нерегулируемый (исполнительный орган приводится в движение с одной постоянной скоростью); регулируемый (путем воздействия на электропривод скорость движения исполнительного органа изменяется в соответствии с требованиями технологического процесса); следящий (с помощью электропривода воспроизводится перемещение исполнительного органа в соответствии с произвольно изменяющимся задающим сигналом); программно-управляемый (электропривод обеспечивает перемещение исполнительного органа в соответствии с заданной программой); адаптивный (электропривод автоматически обеспечивает оптимальный режим движения исполнительного органа при изменении условий его работы); позиционный (электропривод обеспечивает регулирование положения исполнительного органа рабочей машины).
По роду механического передаточного устройства различают редукторный электропривод, содержащий один из видов механического передаточного устройства, и безредукторный, в котором электродвигатель непосредственно соединен с исполнительным органом.
По роду электрического преобразовательного устройства различают: вентильный электропривод, преобразовательным устройством которого является вентильный преобразователь энергии. Разновидностями вентильного электропривода являются ионный и полупроводниковый электроприводы. Полупроводниковый электропривод, в свою очередь, делится на тиристорный и транзисторный электроприводы, преобразовательным устройством в которых является соответственно тиристорный или транзисторный преобразователь электроэнергии; система управляемый выпрямитель двигатель (УВ Д) вентильный электропривод постоянного тока, преобразовательным устройством которого является регулируемый выпрямитель; система преобразователь частоты двигатель (ПЧ Д) вентильный электропривод переменного тока, преобразовательным устройством которого является регулируемый преобразователь частоты; система; генератор двигатель (Г Д) и магнитный усилитель двигатель (МУ Д) регулируемый электропривод, преобразовательным устройством которого является соответственно электромашинный преобразовательный агрегат или магнитный усилитель.
По способу передачи механической энергии исполнительному органу электроприводы делятся на индивидуальный, взаимосвязанный и групповой.
Индивидуальный электропривод характеризуется тем, что каждый исполнительный орган рабочей машины приводится в движение своим отдельным двигателем. Этот вид привода в настоящее время является основным, так как .при индивидуальном электроприводе упрощается кинематическая передача от двигателя к исполнительному органу, легко осуществляется автоматизация технологического процесса, улучшаются условия обслуживания рабочей машины.
Взаимосвязанный электропривод содержит два или несколько электрически или механически связанных между собой электроприводов. Частным случаем взаимосвязанного электропривода является многодвигательный электропривод, при котором несколько двигателей работают на общий вал, приводя в движение один исполнительный орган.
Групповой электропривод характеризуется тем, что от одного двигателя приводится в движение несколько исполнительных органов одной или нескольких рабочих машин. Такая система электропривода, широко применявшаяся на раннем этапе его развития, имеет разветвленную кинематическую цепь (трансмиссию), что усложняет ее эксплуатацию и автоматизацию технологических процессов.
№2 Приведение моментов сопротивления к одной оси вращения. Приведение сил сопротивления.
При совершении полезной работы рабочий орган исполнительного механизма ИМ получает механическую энергию от ротора двигателя РД через передаточное устройство ПУ. Кинематическая схема такого механизма приведена на рис. 2.8.
|
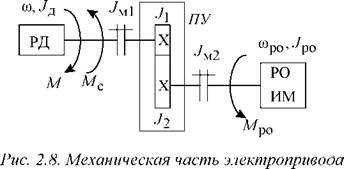
На рис. 2.8 приняты следующие обозначения: РД - ротор двигателя; ПУ - передаточное устройство; РОИМ - рабочий орган исполнительного механизма; М,(о - момент и скорость вращения двигателя; Мс - момент сопротивления, приведенный к валу двигателя; Мр0,®ро - момент и скорость вращения рабочего органа исполнительного механизма; J - момент инерции двигателя; JMі, JM2 - моменты инерции соединительных муфт; J,J2 ~ моменты инерции шестерни и колеса;Jр0 - момент инерции рабочего органа исполнительного механизма. Редуктор понижает скорость вращения выходного вала в передаточное число раз. Принцип приведения момента сопротивления от рабочего органа исполнительного механизма к валу электродвигателя заключается в равенстве мощностей на валу двигателя и на валу рабочего органа. Механическая мощность рабочего органа исполнительного механизма определяется выражением
(2.14)
|
|
|
|
(2.15) |
Рс =МС - ю-гіп,
где г|п - КПД передаточного устройства.
Приравнивая правые части уравнений (2.15) и (2.14), получим
Решим (2.16) относительно Мс, с учетом (2.13) найдем выражение для момента сопротивления при реактивной нагрузке исполнительного механизма:
|
При активной нагрузке поток мощности направлен от механизма к электродвигателю. Механическая мощность на валу электродвигателя, с учетом потерь мощности в передаточном устройстве, определяется выражением
(2.18) |
гс
Приравнивая правые части уравнений (2.18) и (2.14), с учетом (2.13), получим выражение для момента сопротивления, приведенного к валу двигателя при активной нагрузке исполнительного механизма и работе электропривода в четвертом квадранте:
|
Анализ уравнений (2.17) и (2.19) показывает, что при учете потерь в кинематике производственного механизма при активной нагрузке момент сопротивления при подъеме и спуске груза будет различным.
№3 Приведение моментов инерции к одной оси вращения. Приведение масс движущихся поступательно
Приведение
моментов инерции
к одной оси
вращения основано на том, что суммарный
запас кинетической энергии движущихся
частей привода, отнесенный к одной оси,
остается неизменным. При наличии
вращающихся частей, обладающих моментами
инерции
![]() и
угловыми скоростями
и
угловыми скоростями
![]() (см.
рис. 2.1), можно заменить их динамическое
действие действием одного момента
инерции, приведенного например, к
скорости вала двигателя. В таком случае
можно написать:
(см.
рис. 2.1), можно заменить их динамическое
действие действием одного момента
инерции, приведенного например, к
скорости вала двигателя. В таком случае
можно написать:
 (2.7)
(2.7)
откуда результирующий или суммарный момент инерции, приведенный к валу двигателя:
![]()
 (2.8)
(2.8)
где
![]() —
момент
инерции ротора двигателя и других
элементов (муфты, шестерни и т. п.),
установленных на валу двигателя.
—
момент
инерции ротора двигателя и других
элементов (муфты, шестерни и т. п.),
установленных на валу двигателя.
Иногда в каталогах для двигателей указывается значение махового момента GD2, кгс*м2. В этом случае моменты инерции ротора двигателя, кг-м2, в системе СИ вычисляются по формуле
![]() (2.9)
(2.9)
где D — диаметр инерции, м; G — сила тяжести (вес), кгс. Это соотношение следует из формулы, определяющей момент инерции тела массой ,m кг,
![]() (2.10)
(2.10)
где
![]() —
радиус инерции, м.
—
радиус инерции, м.
Если сила тяжести выражена в ньютонах, то масса тела определяется из равенства
![]() , (2.11)
, (2.11)
где g = 9,81 м/с2 — ускорение свободного падения.
Момент инерции сплошного цилиндра относительно продольной оси вычисляется по формуле
![]() (2.12)
(2.12)
где R— радиус цилиндра, м.
Приведение масс, движущихся поступательно, осуществляется также на основании равенства запаса кинетической энергии
Отсюда момент инерции, приведенный к валу двигателя,
![]() .
.
Если механизм имеет вращающиеся и поступательно движущиеся элементы, то суммарный приведенный к валу двигателя момент инерции определяется на основании (2.8) и (2.13)
 ...
...
Для приведения
момента инерции к поступательному
движению нужно момент инерции заменить
приведенной массой, т. е.
![]()
№4 Механические характеристики производственных механизмов и электродвигателей
При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
Механической характеристикой механизма называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя) ω = f(Mс).
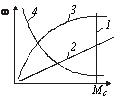
Рис. 1. Механические характеристики механизмов
Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов:
1. Характеристика с моментом сопротивления, не зависящим от скорости (прямая 1 на рис. 1). Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи и др.
2 .
Характеристика с моментом сопротивления
линейно зависящим от скорости (прямая
2 на рис. 1). Такая зависимость присуща,
например, приводу генератора постоянного
тока с независимым возбуждением,
работающему на постоянную нагрузку.
.
Характеристика с моментом сопротивления
линейно зависящим от скорости (прямая
2 на рис. 1). Такая зависимость присуща,
например, приводу генератора постоянного
тока с независимым возбуждением,
работающему на постоянную нагрузку.
3. Характеристика с нелинейным возрастанием момента (кривая 3 на рис. 1). Типичными примерами здесь могут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент Мс зависит от квадрата угловой скорости ω.
4. Характеристика с нелинейно спадающим моментом сопротивления (кривая 4 на рис. 1). Например, у механизмов главного движения некоторых металлорежущих станков момент Мс изменяется обратно пропорционально ω, а мощность потребляемая механизмом, остается постоянной.
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента ωд = f(M).
В качестве примеров на рис. 2 приведены механические характеристики: 1 - синхронного двигателя; 2 – двигателя постоянного тока независимого возбуждения; 3 – двигателя постоянного тока последовательного возбуждения.
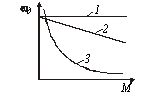
Рис. 2. Механические характеристики электродвигателей
Для оценки свойств механических характеристик электропривода используют понятие жесткости характеристики. Жесткость механической характеристики определяется по выражению
β = dМ /dωд,
где dМ – изменение момента двигателя; dωд – соответствующее изменение угловой скорости.
Для линейных характеристик значение β остается постоянным, для нелинейных – зависит от рабочей точки.
Используя это понятие, характеристики, приведенные на рис. 2, можно качественно оценить так: 1 – абсолютно жесткая (β = ∞); 2 – жесткая; 3 – мягкая.
Установившееся движение и устойчивость установившегося движения электропривода
Имея механическую
характеристику двигателя и исполнительного
органа, нетрудно определить выполнимость
условия установившегося движения
![]() .
Для этого совместим в одном и том же
квадранте эти характеристики. Факт
пересечения этих характеристик говорит
о возможности совместной работы двигателя
и исполнительного органа, а точка их
пересечения является точкой установившегося
движения, так как в этой точке
и
.
Для этого совместим в одном и том же
квадранте эти характеристики. Факт
пересечения этих характеристик говорит
о возможности совместной работы двигателя
и исполнительного органа, а точка их
пересечения является точкой установившегося
движения, так как в этой точке
и
![]() .
.
На рисунке 2.4
показаны механические характеристики
вентилятора (кривая 1) и двигателя
независимого возбуждения (прямая 2).
Точка А является точкой установившегося
движения, а ее координаты
![]() –
координатами установившегося движения
вентилятора.
–
координатами установившегося движения
вентилятора.
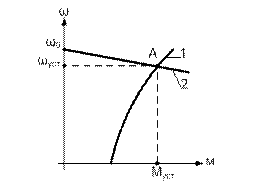
Рис. 2.4. Определение параметров установившегося движения
Для полного анализа установившегося движения необходимо определить, является ли это движение устойчивым. Устойчивым будет такое установившееся движение, которое, будучи выведенным из установившегося режима каким-то внешним возмущением, возвращается в этот режим после исчезновения возмущения [2].
Для определения устойчивости движения удобно пользоваться механическими характеристиками.
Необходимым и достаточным условием устойчивости установившегося движения является противоположность знаков приращения скорости и возникающего при этом динамического момента, т.е.
![]() ,
(2.11)
,
(2.11)
Оценим в качестве
примера (рис. 2.5) устойчивость движения
электропривода. Установившееся движение
возможно с двумя скоростями:
![]() в
точке 1 и
в
точке 1 и
![]() в
точке 2, в которых
.
Определим, устойчиво ли движение в обеих
точках.
в
точке 2, в которых
.
Определим, устойчиво ли движение в обеих
точках.
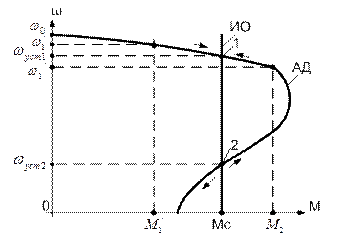
Рис. 2.5. Определение устойчивости механического движения
Точка
1. Предположим, что под действием
кратковременного возмущения скорость
увеличилась до значения
![]() ,
после чего воздействие исчезло. По
механической характеристике АД скорости
будет
соответствовать момент
,
после чего воздействие исчезло. По
механической характеристике АД скорости
будет
соответствовать момент
![]() .
.
В результате этого
динамический момент
![]() =
=![]() станет
отрицательным, и привод начнет тормозиться
до скорости
,
при которой
.
станет
отрицательным, и привод начнет тормозиться
до скорости
,
при которой
.
Если возмущение
вызовет снижение скорости до значения
![]() ,
то мо-
мент АД возрастет до
значения
,
то мо-
мент АД возрастет до
значения
![]() ,
динамический момент
=
,
динамический момент
=
![]() станет
положительным, и скорость увеличится
до прежнего значения
.
Таким образом, движение в точке1 со
скоростью
является
устойчивым.
станет
положительным, и скорость увеличится
до прежнего значения
.
Таким образом, движение в точке1 со
скоростью
является
устойчивым.
При проведении аналогичного анализа можно сделать вывод о неустойчивости движения электропривода в точке 2со скоростью .
Устойчивость
или неустойчивость движения
может быть определена и аналитически
с помощью понятия жесткости механических
характеристик АД и исполнительного
органа:
![]() .
Условие
устойчивости:
.
Условие
устойчивости:
![]() или
или
![]() .
(2.12)
.
(2.12)
Для рассматриваемого
примера
![]() ,
поэтому устойчивость определяется
знаком жесткости характеристики АД:
для точки
1
,
поэтому устойчивость определяется
знаком жесткости характеристики АД:
для точки
1
![]() движение
устойчиво, а для точки
2
движение
устойчиво, а для точки
2
![]() и
движение неустойчиво.
и
движение неустойчиво.
Отметим, что в
соответствии с уравнением (2.10) при
определенной жесткости
![]() устойчивая
работа электропривода возможна и при
положительной жесткости механической
характеристики АД, в частности, на так
называемом нерабочем участке характеристики
АД.
устойчивая
работа электропривода возможна и при
положительной жесткости механической
характеристики АД, в частности, на так
называемом нерабочем участке характеристики
АД.
№5 Основное уравнение движения электропривода. Время ускорения и замедления привода, оптимальное передаточное отношение.
Механическая часть электропривода представляет собой систему твёрдых тел, движение которых определяется механическими связями между телами. Если заданы соотношения между скоростями отдельных элементов, то уравнение движения электропривода имеет дифференциальную форму. Наиболее общей формой записи уравнений движения являются уравнения движения в обобщенных координатах (уравнения Лагранжа):
![]() (2.19)
(2.19)
где Wk
– запас кинетической энергии системы,
выраженный через обобщенные координаты
qi
и обобщенные скорости
![]() ;
;
Qi–
обобщенная сила, определяемая суммой
работ δAiвсех
действующих сил на возможном перемещении
![]() .
.
Уравнение Лагранжа можно представить в другом виде:
![]() (2.20)
(2.20)
Здесь L– функция Лагранжа, представляющая собой разность кинетической и потенциальной энергий системы:
L=Wk – Wn.
Число уравнений равно числу степеней свободы системы и определяется числом переменных – обобщенных координат, определяющих положение системы.
Запишем уравнения Лагранжа для <двухмассовой упругой системы (рис. 2.9).
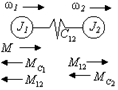
Рис. 2.9. Расчетная схема двухмассовой механической части.
Функция Лагранжа в этом случае имеет вид
![]()
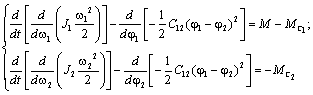
Для определения
обобщенной силы
![]() необходимо
вычислить элементарную работу всех
приведённых к первой массе моментов на
возможном перемещении:
необходимо
вычислить элементарную работу всех
приведённых к первой массе моментов на
возможном перемещении:
![]()
Следовательно, т.к. обобщенная сила определяется суммой элементарных работ δA1 на участке δφ1 , то для определения величины получим:
![]() =
=
![]()
Аналогично, для
определения
![]() имеем:
имеем:
![]()
Подставив выражение для функции Лагранжа в (2.20), получим:
или
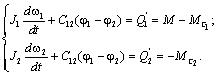
Обозначив
![]() ,
получим:
,
получим:
 (2.21)
(2.21)
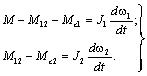
Примем механическую
связь между первой и второй массами
абсолютно жёсткой, т.е.
![]() (рис.
2.10).
(рис.
2.10).
![]()
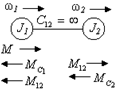
Рис. 2.10. Двухмассовая жесткая механическая система.
Тогда
![]() и
второе уравнение системы примет вид:
и
второе уравнение системы примет вид:
![]()
Подставив его в первое уравнение системы, получим:
![]()
или
![]() (2.22)
(2.22)
Это уравнение
иногда называют основным уравнением
движения электропривода. С его помощью
можно по известному электромагнитному
моменту двигателя М,
моменту сопротивления
![]() и
суммарному моменту инерции
и
суммарному моменту инерции
![]() оценить
среднее значение ускорения электропривода,
рассчитать время, за которое двигатель
достигнет заданной скорости, и решить
другие задачи, если влияние упругих
связей в механической системе существенно.
оценить
среднее значение ускорения электропривода,
рассчитать время, за которое двигатель
достигнет заданной скорости, и решить
другие задачи, если влияние упругих
связей в механической системе существенно.
Рассмотрим
механическую систему с нелинейными
кинематическими связями типа
кривошипно-шатунных, кулисных и других
подобных механизмов (рис. 2.11). Радиус
приведения в них является переменной
величиной, зависящей от положения
механизма:
![]() .
.
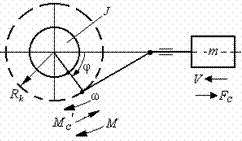
Рис. 2.11. Механическая система с нелинейными кинематическими связями
Представим
рассматриваемую систему в виде
двухмассовой, первая масса вращается
со скоростью ω и имеет момент инерции
![]() ,
а вторая движется с линейной скоростью
V
и представляет суммарную массу m
элементов, жёстко и линейно связанных
с рабочим органом механизма.
,
а вторая движется с линейной скоростью
V
и представляет суммарную массу m
элементов, жёстко и линейно связанных
с рабочим органом механизма.
Связь между
линейными скоростями ω и V
нелинейная, причём
![]() .
Для получения уравнения движения такой
системы без учёта упругих связей
воспользуемся уравнением Лагранжа
(2.19), приняв в качестве обобщенной
координаты угол φ. Определим обобщенную
силу:
.
Для получения уравнения движения такой
системы без учёта упругих связей
воспользуемся уравнением Лагранжа
(2.19), приняв в качестве обобщенной
координаты угол φ. Определим обобщенную
силу:
![]()
где
![]() -
суммарный момент сопротивления от сил,
воздействующих на линейно связанные с
двигателем массы; приведённый к валу
двигателя;
-
суммарный момент сопротивления от сил,
воздействующих на линейно связанные с
двигателем массы; приведённый к валу
двигателя;
FC – результирующая всех сил, приложенная к рабочему органу механизма и линейно связанным с ним элементам;
![]() –
возможное бесконечно
малое перемещение массы m.
–
возможное бесконечно
малое перемещение массы m.
Нетрудно видеть, что
![]()
где
![]() -
радиус приведения.
-
радиус приведения.
Момент статической нагрузки механизма содержит пульсирующую составляющую нагрузки, изменяющуюся в функции угла поворота φ:
![]()
Запас кинетической энергии системы:
![]()
Здесь
![]() -
суммарный приведённый к валу двигателя
момент инерции системы.
-
суммарный приведённый к валу двигателя
момент инерции системы.
Левую часть уравнения Лагранжа (2.19) можно записать в виде:
Таким образом, уравнение движения жёсткого приведённого звена имеет вид:
![]() (2.23)
(2.23)
Оно является нелинейным с переменными коэффициентами.
Для жёсткого
линейного механического звена уравнение
статического режима работы электропривода
соответствует
![]() и
имеет вид:
и
имеет вид:
![]() .
.
Если при движении
![]() то
имеет место или динамический переходный
процесс, или принуждённое движение
системы с периодически изменяющейся
скоростью.
то
имеет место или динамический переходный
процесс, или принуждённое движение
системы с периодически изменяющейся
скоростью.
В механических
системах с нелинейными кинематическими
связями статические режимы работы
отсутствуют. Если
![]() и
ω=const, в таких системах имеет место
установившийся динамический процесс
движения. Он обусловлен тем, что массы,
движущиеся линейно, совершают
возвратно-поступательное движение, и
их скорости и ускорения являются
переменными величинами.
и
ω=const, в таких системах имеет место
установившийся динамический процесс
движения. Он обусловлен тем, что массы,
движущиеся линейно, совершают
возвратно-поступательное движение, и
их скорости и ускорения являются
переменными величинами.
С энергетической точки зрения различают двигательные и тормозные режимы работы электропривода. Двигательный режим соответствует прямому направлению передачи механической энергии к рабочему органу механизма. В электроприводах с активной нагрузкой, а также в переходных процессах в электроприводе, когда происходит замедление движения механической системы, происходит обратная передача механической энергии от рабочего органа механизма к двигателю.
Время переходных режимов привода: пуска, торможения, перехода от одной скорости к другой влияет на производительность механизма. Определение времени переходных процессов основано на интегрировании уравнения движения привода (2.23). Разделяя переменные, получаем:
![]() (2.24)
(2.24)
Время, необходимое
для изменения скорости привода от
![]() до
до
![]() ,
,
 (2.25)
(2.25)
Для решения этого интеграла необходимо знать зависимости моментов двигателя и механизма от скорости. В простейшем случае, приняв М = const, Mc = =const и J = const, получим:
![]() (2.26)
(2.26)
Этим уравнением
можно воспользоваться, например, для
расчета времени пуска привода. Если
значение момента двигателя во время
пуска обозначить через
![]() ,
как это показано на рис. 2.7, то получим
следующее выражение для времени пуска
от состояния покоя до конечной скорости
,
как это показано на рис. 2.7, то получим
следующее выражение для времени пуска
от состояния покоя до конечной скорости
![]() ,
соответствующей заданному моменту
сопротивления:
,
соответствующей заданному моменту
сопротивления:
![]() .
(2.27)
.
(2.27)
Если требуется точно учесть время переходного процесса и момент двигателя не может быть принят постоянным, например при пуске двигателя с короткозамкнутым ротором, необходимо пользоваться (2.25). При этом следует иметь в виду, что момент инерции для большинства приводов имеет постоянное значение, а момент двигателя и момент сопротивления в переходных режимах обычно не остаются постоянными.
Из (2.25) видно, что
теоретически полное время переходного
процесса равно бесконечности.
Действительно, поскольку переходный
процесс заканчивается при наступлении
равенства моментов (М
= Мс),
то величина, стоящая под знаком интеграла,
с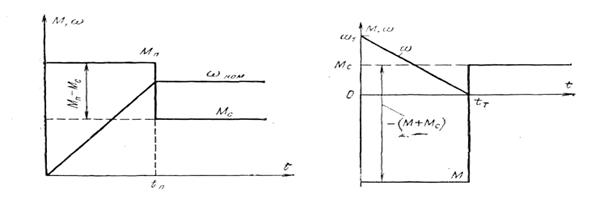 тремится
к бесконечности. В практических расчетах
обычно считают, что процесс разбега
тремится
к бесконечности. В практических расчетах
обычно считают, что процесс разбега
|
|
|
|
|
заканчивается при
скорости, равной не
![]() ,
а приблизительно
=
0.95
,
а приблизительно
=
0.95![]() ,
тогда время разбега получит конечное
значение.
,
тогда время разбега получит конечное
значение.
В тех случаях, когда динамический момент имеет отрицательное значение, привод замедляется. Как указывалось выше, для такого случая уравнение моментов будет иметь вид:
![]() .
.
Очевидно, привод замедляется и в том случае, когда двигатель развивает положительный момент по абсолютному значению, меньший момента сопротивления.
Из последнего уравнения следует, что время торможения
 (2.28)
(2.28)
Полагая в частном случае J - const, M = const и Мс = const, получаем:
 (2.29)
(2.29)
Пользуясь уравнением
(2.29), можно рассчитать время торможения
(![]() =
0) для графика момента, показанного на
рис. 2.8.
=
0) для графика момента, показанного на
рис. 2.8.
Если момент двигателя и момент статический находятся в сложной зависимости от скорости, уравнение движения аналитически не решается. В этом случае приходится пользоваться приближенными графическими или графоаналитическими методами решения.
В ряде практических
случаев (например, в следящих системах,
приводах вспомогательных механизмов
прокатных станов, продольно-строгальных
станках и т. п.) возникает необходимость
в получении минимального времени разгона
и торможения производственного механизма
с целью повышения его производительности.
При заданных значениях моментов инерции
ротора двигателя
![]() ,
производственного механизма
,
производственного механизма
![]() и
момента сопротивления
и
момента сопротивления
![]() уравнение
движения привода относительно рабочего
вала механизма (пренебрегая потерями
в передачах) может быть записано так:
уравнение
движения привода относительно рабочего
вала механизма (пренебрегая потерями
в передачах) может быть записано так:
 ,
(2.30)
,
(2.30)
где k — коэффициент, учитывающий момент инерции передач.
Очевидно, минимум времени разгона имеет место при наибольшем ускорении. Из (2.30)
![]() .
.
Пользуясь правилом
определения максимума
![]()
![]() и
полагая
и
полагая
![]() ,
а также М
= const
(средним за период переходного режима),
находим оптимальное (или наивыгоднейшее)
передаточное отношение i:
,
а также М
= const
(средним за период переходного режима),
находим оптимальное (или наивыгоднейшее)
передаточное отношение i:
![]() (2.31)
(2.31)
В том случае, когда момент сопротивления оказывается значительно меньшим момента двигателя при пуске и торможении,
![]()
№6 Неустановившееся движение электропривода при постоянном динамическом моменте
Неустановившееся
механическое
движение электропривода возникает во
всех случаях, когда момент двигателя
отличается от момента нагрузки, т.е.
когда
![]() .
.
Рассмотрение
неустановившегося движения электропривода
имеет своей основной целью получение
зависимостей во времени выходных
механических координат электропривода
– момента
![]() ,
скорости
,
скорости
![]() и положение вала двигателя
и положение вала двигателя
![]() .
Кроме того, часто требуется определить
время неустановившегося движения
(переходного процесса) электродвигателя.
Отметим, что законы изменения моментов
двигателя и нагрузки должны быть
предварительно заданы.
.
Кроме того, часто требуется определить
время неустановившегося движения
(переходного процесса) электродвигателя.
Отметим, что законы изменения моментов
двигателя и нагрузки должны быть
предварительно заданы.
Рассмотрим
неустановившееся движение при постоянном
динамическом моменте
![]() во время пуска электродвигателя.
Предполагается, что во время пуска
электродвигателя
во время пуска электродвигателя.
Предполагается, что во время пуска
электродвигателя
![]() и
и
![]() ,
но
,
но
![]() .
.
Решая уравнение механического движения электропривода, получаем следующую зависимость [2,4]:
![]() ;
(2.13)
;
(2.13)
![]() (2.14)
(2.14)
Уравнение (2.14)
получено с учетом равенств
![]() и
и
![]() .
.
Полагая в уравнении
(2.13)
![]() и
и
![]() ,
находим время изменения скорости от
,
находим время изменения скорости от
![]() до
до
 .
(2.15)
.
(2.15)
Характеристики
![]() ,
,
![]() ,
,
![]() представлены на рисунке 2.6.
представлены на рисунке 2.6.
Рис. 2.6. Характеристики , , при пуске ЭД
В уравнениях
(2.13), (2.14) и (2.15) момент
![]() принят равным среднему моменту
принят равным среднему моменту
![]() при пуске двигателя, поэтому полученные
выше аналитические соотношения используют
только при выполнении различных
приближенных расчетов в электроприводе.
В частности, неустановившееся движение
может быть рассмотрено при торможении
и реверсе электропривода, или при
переходе с одной характеристики на
другую.
при пуске двигателя, поэтому полученные
выше аналитические соотношения используют
только при выполнении различных
приближенных расчетов в электроприводе.
В частности, неустановившееся движение
может быть рассмотрено при торможении
и реверсе электропривода, или при
переходе с одной характеристики на
другую.
№7 Неустановившееся движение электропривода при линейной зависимости моментов двигателя и исполнительного органа .
Рассматриваемый вид движения является весьма распространенным.
На рисунке 2.7 представлены механические характеристики ЭД и ИО при пуске электродвигателя.
Рис. 2.7. Механические характеристики ЭД и ИО при пуске электродвигателя
Механические характеристики ЭД и ИО можно выразить аналитически следующими уравнениями:
![]() (2.16)
(2.16)
![]() (2.17)
(2.17)
В уравнениях (2.16)
и (2.17)
![]() и
и
![]() – коэффициенты жесткости механических
характеристик ЭД и ИО.
– коэффициенты жесткости механических
характеристик ЭД и ИО.
Подставляя выше приведенные уравнения в уравнение механического движения электропривода, получаем следующие уравнения для зависимостей , , [2,4].
![]() (2.18)
(2.18)
![]() (2.19)
(2.19)
![]() (2.20)
(2.20)
где
![]() – электромеханическая постоянная
времени в секундах, учитывающая
механическую инерционность привода и
влияющая на время пуска электропривода.
– электромеханическая постоянная
времени в секундах, учитывающая
механическую инерционность привода и
влияющая на время пуска электропривода.
Полученные выражения
(2.18)–(2.20) могут использоваться для
анализа переходных процессов различного
вида, но в каждом конкретном случае
должна быть определена электромеханическая
постоянная времени
![]() ,
а также начальные и конечные значения
координат
,
а также начальные и конечные значения
координат
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
В частном случае, когда
.
В частном случае, когда
![]() и
и
![]() ,
эти величины могут быть определены по
формулам:
,
эти величины могут быть определены по
формулам:
![]() ;
(2.21)
;
(2.21)
![]() ;
;
![]() ,
(2.22)
,
(2.22)
где
–
это время, в течение которого электропривод
запускается до скорости
![]() при
при
![]() .
Тогда
.
Тогда
![]() .
Так как обычно момент
.
Так как обычно момент
![]() двигателя при пуске изменяется, то на
практике время пуска в секундах определяют
по выражению
двигателя при пуске изменяется, то на
практике время пуска в секундах определяют
по выражению
![]() ,
или по следующему выражению:
,
или по следующему выражению:
![]() .
.
Зависимости , приведены на рисунке 2.8.
Рис. 2.8. Зависимости , при пуске электродвигателя
№8 НЕУСТАНОВИВШЕЕСЯ ДВИЖЕНИЕ ЭЛЕКТРОПРИВОДА ПРИ ПРОИЗВОЛЬНОМ ДИНАМИЧЕСКОМ МОМЕНТЕ
П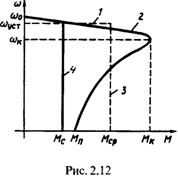 ри
переходных процессах этого вида моменты
двигателя и исполнительного органа
различны и могут быть нелинейными
функциями скорости, времени или
положения . Основная сложность получения
искомых зависимостей
ри
переходных процессах этого вида моменты
двигателя и исполнительного органа
различны и могут быть нелинейными
функциями скорости, времени или
положения . Основная сложность получения
искомых зависимостей![]() заключается
в интегрировании уравнения движения
(2.15), которое не имеет универсального
способа решения. Поэтому в зависимости
от исходных данных и требуемой
точности расчета могут применяться
различные методы получения кривых
переходного процесса, которые кратко
рассматриваются далее
заключается
в интегрировании уравнения движения
(2.15), которое не имеет универсального
способа решения. Поэтому в зависимости
от исходных данных и требуемой
точности расчета могут применяться
различные методы получения кривых
переходного процесса, которые кратко
рассматриваются далее
Л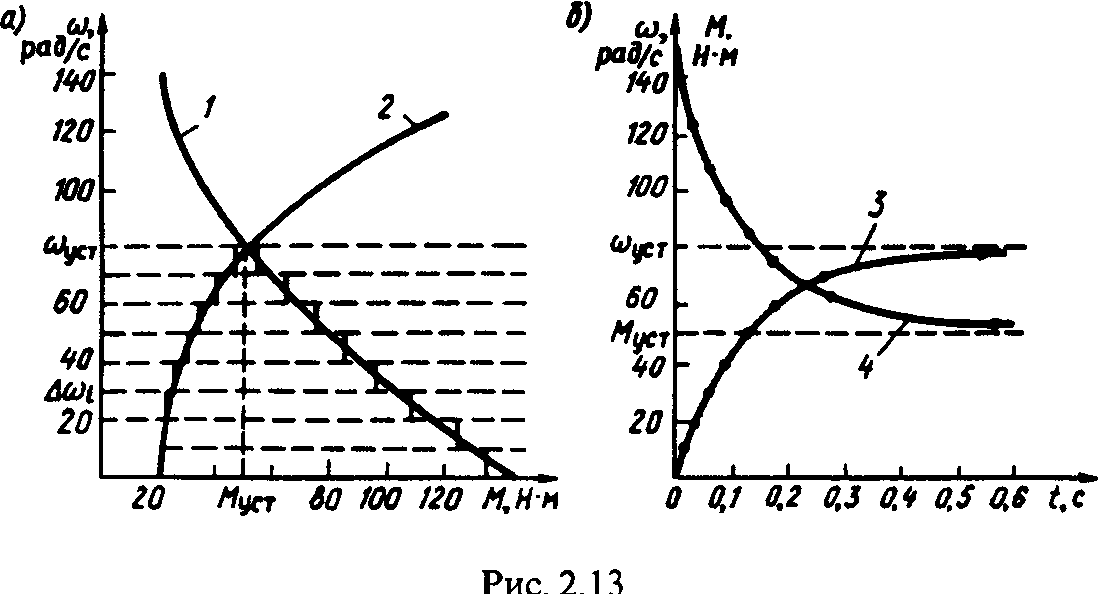 инеаризация
нелинейных механических характеристик
двигателя и исполнительного органа
основана
на представлении (аппроксимации) этих
характеристик или их отдельных участков
прямыми линиями. В
этом
случае для построения кривых переходного
процесса или расчета его продолжительности
используются формулы (2.24), (2.30) и (2.32).
Если механические характеристики
аппроксимируются несколькими прямыми
отрезками, то переходный процесс строится
по участкам, при этом конечное значение
переменной на предыдущем участке
является начальным значением для
следующего участка. Методы
численного интегрирования уравнения
движения. Во
многих случаях, когда механические
характеристики двигателя и исполнительного
органа заданы графически или в виде
таблиц, целесообразно применять для
решения разработанные в математике
численные методы интегрирования
дифференциальных уравнений, к которым
и относится уравнение механического
движения ЭП (2.16). Наиболее простым из
них является метод Эйлера, сущность
которого рассмотрим на следующем
примере.
инеаризация
нелинейных механических характеристик
двигателя и исполнительного органа
основана
на представлении (аппроксимации) этих
характеристик или их отдельных участков
прямыми линиями. В
этом
случае для построения кривых переходного
процесса или расчета его продолжительности
используются формулы (2.24), (2.30) и (2.32).
Если механические характеристики
аппроксимируются несколькими прямыми
отрезками, то переходный процесс строится
по участкам, при этом конечное значение
переменной на предыдущем участке
является начальным значением для
следующего участка. Методы
численного интегрирования уравнения
движения. Во
многих случаях, когда механические
характеристики двигателя и исполнительного
органа заданы графически или в виде
таблиц, целесообразно применять для
решения разработанные в математике
численные методы интегрирования
дифференциальных уравнений, к которым
и относится уравнение механического
движения ЭП (2.16). Наиболее простым из
них является метод Эйлера, сущность
которого рассмотрим на следующем
примере.
 Метод
Эйлера прост, нагляден и позволяет
получать требуемую точность расчета,
которая обеспечивается выбором интервалов
скорости.
Метод
Эйлера прост, нагляден и позволяет
получать требуемую точность расчета,
которая обеспечивается выбором интервалов
скорости.
Графоаналитические методы построения кривых переходного процесса используются в случаях, когда механические характеристики двигателя и исполнительного органа заданы графически. В теории ЭП разработано несколько таких методов (например, методы площадей и пропорций), основанных также на решении уравнения (2.16). Подробно эти методы рассмотрены в [1, 2, 4].
№9 Конструкция, принцип действия и основные типы двигателей постоянного тока.
Электрическая машина постоянного тока состоит из статора, якоря, коллектора, щеткодержателя и подшипниковых щитов (рисунок 1). Статор состоит из станины (корпуса), главных и добавочных полюсов, которые имеют обмотки возбуждения. Эту неподвижную часть машины иногда называют индуктором. Главное его назначение — создание магнитного потока. Станина изготавливается из стали, к ней болтами крепятся главные и добавочные полюса, а также подшипниковые щиты. Сверху на станине имеются кольца для транспортирования, снизу — лапы для крепления машины к фундаменту. Главные полюса машины набираются из листов электротехнической стали толщиной 0,5 -1 мм с целью уменьшения потерь, которые возникают из-за пульсаций магнитного поля полюсов в воздушном зазоре под полюсами. Стальные листы сердечника полюса спрессованы и скреплены заклепками.
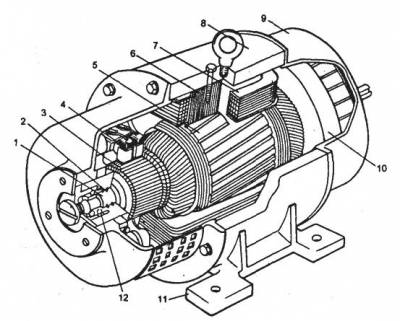
Рисунок 1 – Машина постоянного тока: I — вал; 2 — передний подшипниковый щит; 3 — коллектор; 4 — щеткодержатель; 5 — сердечник якоря с обмоткой; б — сердечник главного полюса; 7 — полюсная катушка; 8 — станина; 9 — задний подшипниковый щит; 10 — вентилятор; 11 — лапы; 12 — подшипник
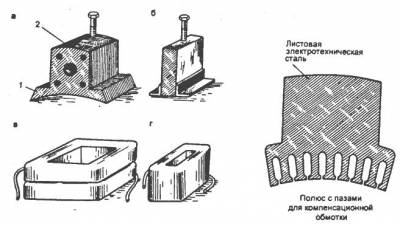
Рисунок 2 – Полюса машины постоянного тока: а — главный полюс; б — дополнительный полюс; в — обмотка главного полюса; г — обмотка дополнительного полюса; 1 — полюсный наконечник; 2 — сердечник
В полюсах различают сердечник и наконечник (рисунок 2). На сердечник надевают обмотку возбуждения, по которой проходит ток, создавая магнитный поток. Обмотка возбуждения наматывается на металлический каркас, оклеенный электрокартоном (в больших машинах), или размещается на изолированном электрокартоном сердечнике (малые машины). Для лучшего охлаждения катушку делят на несколько частей, между которыми оставляют вентиляционные каналы. Добавочные полюса устанавливаются между главными. Они служат для улучшения коммутации. Их обмотки включаются последовательно в цепь якоря, поэтому проводники обмотки имеют большое сечение.
Якорь машины постоянного тока состоит из вала, сердечника, обмотки и коллектора. Сердечник якоря собирается из штампованных листов электротехнической стали толщиной 0,5 мм и спрессовывается с обеих сторон с помощью нажимных шайб. В машинах с радиальной системой вентиляции листы сердечника собираются в отдельные пакеты толщиной 6-8 см, между которыми делают вентиляционные каналы шириной 1 см. При осевой вентиляции в сердечнике выполняют отверстие для прохождения воздуха вдоль вала. На внешней поверхности якоря имеются пазы для обмотки.
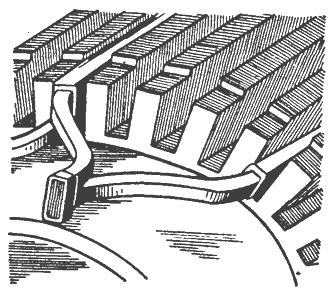
Рисунок 3 – Расположение секции обмотки якоря в пазах сердечника
Обмотка якоря изготавливается из медных проводов круглого или прямоугольного сечения в виде заранее выполненных секций (рисунок 3). Они укладываются в пазы, где тщательно изолируются. Обмотку делают двухслойной: размещают в каждом пазу две стороны разных якорных катушек — одну над другой. Обмотку закрепляют в пазах клиньями (деревянными, гетинаксовыми или текстолитовыми), а лобовые части крепят специальным проволочным бандажом. В некоторых конструкциях клинья не применяют, а обмотку крепят бандажом. Бандаж изготовляют из немагнитной стальной проволоки, которая наматывается с предварительным натяжением. В современных машинах для бандажировки якорей используют стеклянную ленту.
Коллектор машины постоянного тока собирается из клиноподобных пластин холоднокатаной меди. Пластины изолируют одну от другой прокладками из коллекторного миканита толщиной 0,5 - 1 мм. Нижние (узкие) края пластин имеют вырезы в виде "ласточкина хвоста", которые служат для крепления медных пластин и миканитовой изоляции. Коллекторы крепят нажимными конусами двумя способами: при одном из них усилие от зажима передается только на внутреннюю поверхность "ласточкина хвоста", при втором — на "ласточкин хвост" и конец пластины.
Коллекторы с первым способом крепления называют арочными, со вторым — клиновыми. Наиболее распространены арочные коллекторы.
В коллекторных пластинах со стороны якоря при небольшой разнице в диаметрах коллектора и якоря делают выступы, в которых фрезеруют прорези (шлицы). В них укладывают концы обмотки якоря и припаивают оловянистым припоем. При большой разнице в диаметрах припайка к коллектору делается с помощью медных полосок, которые называются "петушками".
В быстроходных машинах большой мощности для предотвращения выпучивания пластин под действием центробежных сил применяют внешние изолированные бандажные кольца.
Щеточный аппарат состоит из траверсы, щеточных пальцев (болтов), щеткодержателей и щеток. Траверса предназначена для крепления на ней щеточных пальцев щеткодержателей, образующих электрическую цепь.
Щеткодержатель состоит из обоймы, в которую помещается щетка, рычага для прижима щетки к коллектору и пружины. Давление на щетку составляет 0,02 - 0,04 МПа.
Для соединения щетки с электрической цепью имеется гибкий медный тросик.
В машинах малой мощности применяют трубчатые щеткодержатели, которые крепят в подшипниковом щите. Все щеткодержатели одной полярности соединяются между собой сборными шинами, которые подключаются к выводам машины.
Щетки (рисунок 4) в зависимости от состава порошка, способа изготовления и физических свойств разделяют на шесть основных групп: угольно-графитовые, графитовые, электрографитовые, медно-графитовые, бронзографитовые и серебряно-графитовые.
Подшипниковые щиты электрической машины служат в качестве соединительных деталей между станиной и якорем, а также опорной конструкцией для якоря, вал которого вращается в подшипниках, установленных в щитах.

Рисунок 4 – Щетки:
а — для машин малой и средней мощности; б — для машин большой мощности; 1 — щеточный канатик; 2 — наконечник
В последние годы статор двигателей постоянного тока собирают из отдельных листов электротехнической стали. В листе одновременно штампуются ярмо, пазы, главные и добавочные полюса.Принципу работы электродвигателя постоянного тока может быть дано два описания:
1. подвижная рамка (два стержня с замкнутыми концами) с током в магнитном поле статора
2. взаимодействие магнитных полей статора и ротора.
Необходимо отметить, что работа по вращению ротора (рамки с током) совершается не за счет энергии внешнего магнитного поля (поля статора), а за счет источника тока, поддерживающего неизменным ток в контуре рамки. При изменениях магнитного потока, пронизывающего контур (рамку с током) при вращении, в этом контуре возникает э.д.с. индукции, направленная противоположно э.д.с. источника тока. Следовательно, источник тока, кроме работы, затрачиваемой на выделение ленц-джоулева тепла, должен совершать дополнительную работу против э.д.с. индукции. Сам же процесс вращения происходит за счет силы Ампера, действующей на проводник с электрическим током, находящийся в магнитном поле. Правильное мнение, что ротор (рамка с током) приходит в движение за счет того, что его магнитное поле отталкивается от магнитного поля статора.
Классификация
ДПТ классифицируют по виду магнитной системы статора:
с постоянными магнитами;
с электромагнитами:
с независимым включением обмоток (независимое возбуждение);
с последовательным включением обмоток (последовательное возбуждение);
с параллельным включением обмоток (параллельное возбуждение);
со смешанным включением обмоток (смешанное возбуждение):
с преобладанием последовательной обмотки;
с преобладанием параллельной обмотки;
Вид подключения обмоток статора существенно влияет на тяговые и электрические характеристики электродвигателя.
Разновидности
Коллекторные, с щёточноколлекторным переключателем тока
С одним коллектором (щёточноколлекторным узлом
С двумя коллекторами (щёточноколлекторными узлами, в бесколлекторных — с инвертором на двух параллельных мостах) С тремя коллекторами и тремя обмотками (в бесколлекторных с инвертором на трёх параллельных мостах, трёхфазный).С четырьмя коллекторами (щёточноколлекторными узлами) и двумя обмотками синусной и косинусной (синусно-косинусные), С четырьмя коллекторами и четырьмя обмотками (в бесколлекторных — с инвертором на четырёх параллельных мостах, четырёхфазный).С восемью коллекторами (щёточноколлекторными узлами). В этом двигателе уже нет рамок, а ток подаётся через коллекторы в отдельные стержни ротора.
Бесколлекторные, с электронным переключателем тока[править | править исходный текст]
Электронным аналогом щёточно-коллекторного узла является инвертор с датчиком положения ротора (ДПР) (вентильный электродвигатель).
Ротор является постоянным магнитом, а обмотки статора переключаются электронными схемами — инверторами. Бесколлекторные электродвигатели могут быть однофазными (две «мёртвые точки»), двухфазными (синусно-косинусными), трёх- и более фазными.
Бесколлекторный двигатель постоянного тока с выпрямителем (мостом) может заменить универсальный коллекторный двигатель (УКД).
Другие виды электродвигателей постоянного тока
Униполярный электродвигатель (униполярный генератор)Универсальный коллекторный двигатель, — работает и на постоянном токе, и на переменном. Применяется в ручных электроинструментах (электродрели, электролобзики, электропилы, электрорубанки и др.), пылесосах, кофемолках, блендерах и др.
№10 механические характеристики двигателя постоянного тока независимого возбуждения
На рисунке 4.1 приведена схема включения ЭД в сеть.
ДПТ НВ может работать в двигательных и тормозных режимах.
Электромеханической
характеристикой называется зависимость
угловой скорости ЭД от тока якоря
![]() .
Она характеризует загрузку якоря по
току.
.
Она характеризует загрузку якоря по
току.
Механической
характеристикой называется зависимость
момента ЭД от скорости:
![]() .
Она характеризует работу электродвигателя.
Обе зависимости связаны между собой
следующим выражением:
.
Она характеризует работу электродвигателя.
Обе зависимости связаны между собой
следующим выражением:
![]() (4.1)
(4.1)
где
![]() – конструктивный
коэффициент ЭД (
– конструктивный
коэффициент ЭД (![]() –
число пар полюсов статора;
–
число пар полюсов статора;
![]() –
число активных проводников обмотки
якоря;
–
число активных проводников обмотки
якоря;
![]() –
число параллельных ветвей обмотки
якоря);
–
число параллельных ветвей обмотки
якоря);
![]() –
номинальный
магнитный поток статора, Вб;
–
номинальный
магнитный поток статора, Вб;
![]() –
ток якоря, А.
–
ток якоря, А.
Двигательный режим ДПТ НВ
Для якорной цепи может быть записано следующее выражение:
Uя
= Е+(Rя+Rд)![]() Iя.
(4.2)
Iя.
(4.2)
Для цепи возбуждения:
Uв = (Rовм+Rдв) Iв, (4.3)
где Iя и Iв – токи в цепи якоря и обмотки возбуждения, А; Uя = Uс – напряжение якоря и сети, В; Е – противоЭДС, наводимая в обмотке якоря при его вращении в магнитном поле, создаваемом обмоткой возбуждения, В; Rд и Rдв – добавочные сопротивления в цепях якоря и возбуждения, Ом (они могут отсутствовать); Rя = Rо.я +Rко + Rдп + Rщ.к – внутреннее сопротивление якорной цепи, Ом; (Rо.я – сопротивление обмотки якоря; Rдп – сопротивление обмотки дополнительных полюсов; Rко – сопротивление компенсационной обмотки; Rщ.к – сопротивление щеточного контакта).
Сопротивление Rя определяется по выражению:
![]() (4.4)
(4.4)
Ток возбуждения создает магнитный поток Ф (в веберах). Для получения номинального магнитного потока при пуске ЭД сопротивление Rдв принимается равным нулю. После чего подается номинальное напряжение на якорную цепь и на обмотку возбуждения. Взаимодействие пускового тока якоря с номинальным магнитным потоком статора Фн создает вращающий момент Мв и двигатель запускается.
При скорости
и
![]() ,
пусковой ток в якоре определяется по
выражению
,
пусковой ток в якоре определяется по
выражению
![]()
![]() ,
,
т.к. Rя – очень мало.
Для уменьшения пускового тока якоря до безопасного значения (2,5 Iян) на время пуска ЭД в цепь якоря необходимо включать добавочное сопротивление
![]() .
(4.5)
.
(4.5)
Обычно добавочное сопротивление (пусковой реостат) разбит на секции. По мере увеличения скорости растет противоЭДС и ток в якоре уменьшается согласно выражению:
![]() ,
(4.6)
,
(4.6)
где
![]() – противоЭДС
ЭД.
– противоЭДС
ЭД.
Поэтому при пуске ЭД необходимо постепенно шунтировать секции пускового реостата.
Если решить уравнение (4.2) относительно угловой скорости, то получим уравнение для естественной электромеханической характеристики [1,4]:
![]() ,
(4.7)
,
(4.7)
где
– скорость идеального холостого хода
ЭД;
![]() – перепад скорости по отношению к
скорости
.
– перепад скорости по отношению к
скорости
.
В уравнении (4.7)
![]() определяется как:
определяется как:
![]() ,
(4.8)
,
(4.8)
где
![]() –
номинальная угловая скорость ЭД, рад/с.
–
номинальная угловая скорость ЭД, рад/с.
Ток якоря определяется
по выражению
![]() .
.
Если этот ток подставить в уравнение (4.7), то получим уравнение для механической характеристики [1,4]:
![]() ,
(4.9)
,
(4.9)
где
![]() –
номинальная мощность ЭД, кВт;
–
номинальная мощность ЭД, кВт;
![]() – номинальный
момент ЭД, Н·м.
– номинальный
момент ЭД, Н·м.
Если Uя
![]() Uян,
или ф
фн,
или Rд
0,
то получим искусственные электромеханические
и механические характеристики.
Естественная и искусственные характеристики
приведены на рисунке 4.2.
Uян,
или ф
фн,
или Rд
0,
то получим искусственные электромеханические
и механические характеристики.
Естественная и искусственные характеристики
приведены на рисунке 4.2.
Рис. 4.2. Естественная и искусственные характеристики ЭД
Тормозные режимы ДПТ НВ
ЭД может работать в трех тормозных режимах – генераторном (рекуперативном), динамического торможения и в режиме противовключения [1,4].
а) Генераторный (рекуперативный) режим
Его можно получить,
если уменьшить напряжение на якоре (Uя
< Uян).
При этом скорость якоря
![]() будет больше скорости
будет больше скорости
![]() .
Схема ЭД будет такая же, как и в двигательном
режиме. Сначала ЭД тормозится, отдавая
энергию в сеть, затем он переходит
работать в двигательный режим, но с
меньшей скоростью (рис. 4.3).
.
Схема ЭД будет такая же, как и в двигательном
режиме. Сначала ЭД тормозится, отдавая
энергию в сеть, затем он переходит
работать в двигательный режим, но с
меньшей скоростью (рис. 4.3).
Рис. 4.3. Характеристики двигательного и рекуперативного
режима торможения ЭД
б) Динамический режим
Необходимо у работающего ЭД якорь замкнуть на тормозное сопротивление Rт, а обмотку возбуждения оставить подключенной к источнику питания (рис. 4.4).
Рис. 4.4. Схема ЭД в динамическом режиме торможения
Сопротивление Rт
включено для ограничения начального
тормозного тока до величины Iт.нач
= 2,5Iян:
![]() .
.
Тормозная характеристика приведена на рисунке 4.5 (второй квадрант).
Рис. 4.5. Тормозная характеристика ЭД в динамическом режиме торможения
в) Торможение противовключения путем перемены полярности напряжения на якоре. Схема ЭД приведена на рисунке 4.6.
Рис. 4.6. Схема ЭД при реализации торможения противовключения путем перемены полярности напряжения на якоре
Для включения ЭД в двигательный режим необходимо включить контакты контактора КМ1. Для получения торможения противовключением необходимо отключить контакты КМ1 и включить контакты контактора КМ2. В результате таких переключений поменяется полярность напряжения на якоре, изменится направление тока в якоре, и ЭД будет тормозиться.
Для ограничения тормозного тока на время торможения ЭД включают в цепь якоря сопротивление Rд и так называемое сопротивление противовключения Rпр:
![]() ,
(4.10)
,
(4.10)
Тормозной ток определяется по выражению:
![]() .
(4.11)
.
(4.11)
Тормозные характеристики приведены на рисунке 4.7 (второй квадрант).
Рис. 4.7. Тормозные характеристики ЭД при торможении противовключением
При скорости ЭД отключают от сети. Если требуется осуществить реверс ЭД, то при скорости необходимо отключить сопротивление Rпр. Тогда двигатель начнется вращаться в противоположную сторону (третий квадрант).
г) Торможение противовключением за счет действия активного момента сопротивления Мса.
Если при подъеме
груза ввести в цепь якоря сопротивление
Rд
и Rпр,
то сформируется механическая
характеристика, на которой все моменты
двигателя (в том числе и при нулевой
скорости) будут меньше Мс. Под действием
момента сопротивления якорь выворачивается
в обратную сторону. В результате в режиме
противовключения осуществляется спуск
груза на малой (ползучей) скорости (![]() ).
Механическая характеристика приведена
на рисунке 4.7 пунктиром.
).
Механическая характеристика приведена
на рисунке 4.7 пунктиром.
№16 Конструкция и принцип действия трехфазного асинхронного двигателя. Схема включения, э.д.с. статора и ротора, ток ротора асинхронного двигателя.
Асинхронный двигатель имеет неподвижную часть, именуемую статором, и вращающуюся часть, называемую ротором. В статоре размещена обмотка, создающая вращающееся магнитное поле.
Различают асинхронные двигатели с короткозамкнутым и фазным ротором.
В пазах ротора с короткозамкнутой обмоткой размещены алюминиевые или медные стержни. По торцам стержни замкнуты алюминиевыми или медными кольцами. Статор и ротор набирают из листов электротехнической стали, чтобы уменьшить потери на вихревые токи.
Фазный ротор имеет трехфазную обмотку (для трехфазного двигателя). Концы фаз соединены в общий узел, а начала выведены к трем контактным кольцам, размещенным на валу. На кольца накладывают неподвижные контактные щетки. К щеткам подключают пусковой реостат. После пуска двигателя сопротивление пускового реостата плавно уменьшают до нуля.
Принцип действия асинхронного двигателя рассмотрим на модели, представленной на рисунке 12.4.
|
Вращающееся магнитное поле статора представим в виде постоянного магнита, вращающегося с синхронной частотой вращения n1. В проводниках замкнутой обмотки ротора индуктируются токи. Полюса магнита перемещаются по часовой стрелке. Наблюдателю, разместившемуся на вращающемся магните, кажется, что магнит неподвижен, а проводники роторной обмотки перемещаются против часовой стрелки. Направления роторных токов, определенные по правилу правой руки, указаны на рис. Неподвижная часть машины называется статор, подвижная – ротор. Сердечник статора набирается из листовой электротехнической стали и запрессовывается в станину. На рис. 2.1 показан сердечник статора в сборе. Станина (1) выполняется литой, из немагнитного материала. Чаще всего станину выполняют из чугуна или алюминия. На внутренней поверхности листов (2), из которых выполняется сердечник статора, имеются пазы, в которые закладывается трёхфазная обмотка (3). Обмотка статора выполняется в основном из изолированного медного провода круглого или прямоугольного сечения, реже – из алюминия. Обмотка статора состоит из трёх отдельных частей, называемых фазами. Начала фаз обозначаются буквами c1,c2,c3, концы – c4,c5,c6. Начала и концы фаз выведены на клеммник (рис. 2.2.а), закреплённый на станине. Обмотка статора может быть соединена по схеме звезда (рис. 2.2.б) или треугольник (рис. 2.2.в). Выбор схемы соединения обмотки статора зависит от линейного напряжения сети и паспортных данных двигателя. В паспорте трёхфазного двигателя задаются линейные напряжения сети и схема соединения обмотки статора. Например, 660/380, Y/∆. Данный двигатель можно включать в сеть с Uл=660В по схеме звезда или в сеть с Uл=380В – по схеме треугольник. Основное назначение обмотки статора – создание в машине вращающего магнитного поля.Сердечник ротора (рис. 2.3.б) набирается из листов электротехнической стали, на внешней стороне которых имеются пазы, в которые закладывается обмотка ротора. Обмотка ротора бывает двух видов: короткозамкнутая и фазная. Соответственно этому асинхронные двигатели бывают с короткозамкнутым ротором и фазным ротором (с контактными кольцами). Рис. 2.3 Короткозамкнутая обмотка (рис. 2.3) ротора состоит из стержней 3, которые закладываются в пазы сердечника ротора. С торцов эти стержни замыкаются торцевыми кольцами 4. Такая обмотка напоминает “беличье колесо” и называют её типа “беличьей клетки” (рис. 2.3.а). Двигатель с короткозамкнутым ротором не имеет подвижных контактов. За счёт этого такие двигатели обладают высокой надёжностью. Обмотка ротора выполняется из меди, алюминия, латуни и других материалов. Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких двигателей есть очень серьёзный недостаток – ограниченный пусковой момент. Доливо-Добровольский назвал причину этого недостатка – сильно закороченный ротор. Им же была предложена конструкция двигателя с фазным ротором.
|
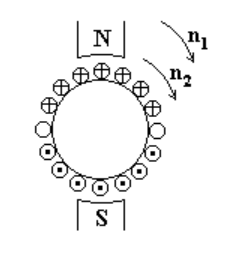 Рис.
12.4
Рис.
12.4
№17 Векторная диаграмма асинхронного двигателя
Векторная диаграмма
Полная схема замещения асинхронного двигателя, как и его векторная диаграмма, может быть построена только для режима работы двигателя с заторможенным ротором, когда частота всех гармонических величин статора и ротора одинакова. Векторная диаграмма двигателя может быть построена для эквивалентного по мощности и току двигателя с заторможенным ротором, у которого каждая фаза ротора имеет активное сопротивление и индуктивное.

При построении векторной диаграммы за опорный вектор принят вектор магнитного потока Ф.
ЭДС Е1 и Е2 отстают по фазе от потока на угол π/2. Вектор тока I2 отстает на некоторый угол φ
вследствие
индуктивно—активного сопротивления
ротора. Угол может быть определен
из соотношения
![]()
Вектор тока цепи статора определяется разностью векторов тока холостого хода и приведенного тока ротора.
I1 = I0 - I2
Вектор напряжения U1 на статорной обмотке равен сумме векторов U1 r1 I1, и J x1 I1. В режиме холостого хода двигателя
U1 = - E 1
Из диаграммы следует, что при увеличении тока ротора угол φ1 будет уменьшаться, а cos φ1 — увеличиваться.
Векторную диаграмму удобно рассматривать совместно со схемой замещения.
Схема замещения также соответствует эквивалентному асинхронному вигателю с заторможенным ротором и приведена к цепи статора. В такой схеме между элементами существуют только электрические связи, что значительно упрощает анализ процессов. Схема замещения двигателя подобна схеме замещения трансформатора, каковым по существу и является двигатель с заторможенным ротором. Отличие заключается только в том, что двигатель имеет воздушный зазор в магнитопроводе.
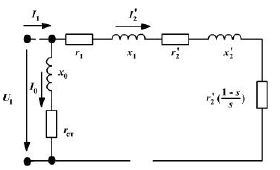
На схеме замещения приняты приведенные значения сопротивлений роторной цепи и приведенное значение ЭДС заторможенного ротора, где — rст эквивалентное сопротивление, связанное с тепловыми потерями в стали от вихревых токов; Х0— индуктивное сопротивление цепи контура намагничивания магнитопровода.
Уравнения МДС и токов асинхронного двигателя
Результирующий
магнитный поток в асинхронном двигателе
создается совместным действием МДС
обмоток статора ![]() и
ротора
и
ротора ![]() ,где
,где ![]() -
магнитное сопротивление магнитной цепи
двигателя;
-
магнитное сопротивление магнитной цепи
двигателя; ![]() -
результирующая МДС, равная МДС обмотки
статора в режиме холостого хода: где I0-
ток холостого хода в фазе обмотки
статора.
МДС
обмоток статора и ротора на один полюс
при работе двигателя под нагрузкой
равны где
-
результирующая МДС, равная МДС обмотки
статора в режиме холостого хода: где I0-
ток холостого хода в фазе обмотки
статора.
МДС
обмоток статора и ротора на один полюс
при работе двигателя под нагрузкой
равны где ![]() -
число фаз обмотки ротора;
-
число фаз обмотки ротора; ![]() -
обмоточный коэффициент обмотки ротора.
-
обмоточный коэффициент обмотки ротора.
При
изменении нагрузки на валу двигателя
меняются токи в статоре I1 и
роторе I2.
Результирующий магнитный поток при
этом сохраняется неизменным, так как
напряжение, подведенное к обмотке
статора, неизменно (![]() )
и почти полностью уравновешивается
ЭДС E1 обмотки
статора:
)
и почти полностью уравновешивается
ЭДС E1 обмотки
статора:
Так как ЭДС E1 пропорциональна результирующему магнитному потоку , то он при изменении нагрузки остается неизменным. Этим и объясняется то, что, несмотря на изменения МДС F1 и F2, результирующая МДС остается неизменной
Разделив
это равенство на ![]() ,
определим уравнение токов асинхронного
двигателя
,
определим уравнение токов асинхронного
двигателя
где  -
ток ротора, приведенный к обмотке
статора.
-
ток ротора, приведенный к обмотке
статора.
Окончательное уравнение токов асинхронного двигателя
Из
этого уравнения следует, что ток статора
в асинхронном двигателе имеет две
составляющие: ![]() -
намагничивающую (почти постоянную)
составляющую (
-
намагничивающую (почти постоянную)
составляющую (![]() )
и
)
и ![]() -
переменную составляющую, компенсирующую
МДС обмотки ротора.
-
переменную составляющую, компенсирующую
МДС обмотки ротора.
Таким образом, ток обмотки ротора оказывает на магнитную систему двигателя такое же размагничивающее влияние, как и ток вторичной обмотки трансформатора при активно-индуктивной нагрузке.
№18. Способы пуска трехфазного асинхронного двигателя с короткозамкнутым ротором и области их применения. Методика разметки выводов статора асинхронного двигателя
Прямой пуск асинхронного двигателя с короткозамкнутым ротором
Наиболее
простым способом пуска двигателя с
короткозамкнутым ротором является
включение обмотки его статора
непосредственно в сеть, на номинальное
напряжение обмотки статора. Такой пуск
называется прямым. При этом пусковой
ток двигателя ![]() .
.
Современные асинхронные двигатели с короткозамкнутым ротором проектируются с таким расчетом, чтобы они допускали прямой пуск. Поэтому прямой пуск возможен, когда сеть достаточно мощна и пусковые токи не вызывают недопустимо больших падений напряжения в сети (не более 10—15%).
Нормальным способом пуска двигателей с короткозамкнутым ротором является прямой пуск.
Если по условиям падения напряжения в сети прямой пуск двигателя с короткозамкнутым ротором невозможен, применяются различные способы пуска двигателя при пониженном напряжении.
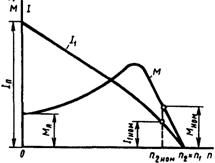
Рисунок 6.1 - Графики изменения тока и момента при пуске асинхронного двигателя с короткозамкнутым ротором. |
Поэтому эти способы пуска применимы, когда возможен пуск двигателя на холостом ходу или под неполной нагрузкой. Необходимость пуска при пониженном напряжении встречается чаще всего у мощных высоковольтных двигателей. Существует несколько способов понижения подводимого к двигателю напряжения. |
Пуск асинхронного двигателя переключением обмотки статора со звезды на треугольник
В
момент подключения двигателя к сети
переключатель ставят в положение
«звезда», при котором обмотка статора
оказывается соединенной в звезду. При
этом фазное напряжение на статоре
снижается в ![]() раз.
Во столько же раз уменьшается и ток в
фазах обмотках двигателя. Кроме того,
при соединении обмоток звездой линейный
ток равен фазному току, в то время как
при соединении этих же обмоток
треугольником линейный ток больше
фазного в
раз.
Следовательно, включив обмотки статора
звездой, линейный ток уменьшается в 3
раза.
раз.
Во столько же раз уменьшается и ток в
фазах обмотках двигателя. Кроме того,
при соединении обмоток звездой линейный
ток равен фазному току, в то время как
при соединении этих же обмоток
треугольником линейный ток больше
фазного в
раз.
Следовательно, включив обмотки статора
звездой, линейный ток уменьшается в 3
раза.
После того как ротор двигателя разгонится до частоты вращения, близкой к установившейся, переключатель быстро переводят в положение «треугольник» и фазные обмотки двигателя оказываются под номинальным напряжением. Возникший при этом бросок тока является незначительным.
Рассмотренный способ пуска имеет существенный недостаток — уменьшение фазного напряжения в раз сопровождается уменьшением пускового момента в три раза, так как, пусковой момент асинхронного двигателя с короткозамкнутым ротором прямо пропорционален квадрату напряжения. Такое значительное уменьшение пускового момента не позволяет применять этот способ пуска для двигателей, включаемых в сеть при значительной нагрузке на валу.
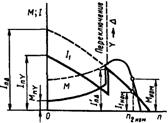
Рисунок 6.2 - Графики изменения момента и фазного тока при пуске асинхронного двигателя с короткозамкнутым ротором переключением обмотки статора со звезды на треугольник. |
Недостатком этого способа пуска является то, что при пусковых переключениях цепь асинхронного двигателя с короткозамкнутым ротором разрывается, что связано с возникновением коммутационных перенапряжений. Этот способ ранее широко применялся при пуске низковольтных двигателей, однако с увеличением мощности сетей потерял свое прежнее значение и в настоящее время используется сравнительно редко. |
Реакторный пуск асинхронного двигателя с короткозамкнутым ротором
Более универсальным является способ пуска понижением подводимого к асинхронному двигателю напряжения посредством реакторов (реактивных катушек — дросселей).
Реакторный пуск осуществляется следующим образом. Сначала двигатель получает питание через трехфазный реактор (реактивную или индуктивную катушку), сопротивление которого ограничивает величину пускового тока. При этом ток из сети поступает в обмотку статора через реакторы, на которых происходит падение напряжения за счет индуктивного сопротивление реактора. В результате на обмотку статора подается пониженное напряжение. По достижении нормальной частоты вращения включается выключатель, который шунтирует реактор, в результате чего на двигатель подается нормальное напряжение сети.
Пусковые реакторы строятся обычно с ферромагнитным сердечником и рассчитываются по нагреву только на кратковременную работу, что позволяет снизить их вес и стоимость. Для весьма мощных двигателей применяются также реакторы без ферромагнитного сердечника, с обмотками, укрепленными на бетонном каркасе.
Если составляющие сопротивления короткого замыкания двигателя равны rк и xк, то начальный пусковой ток при прямом пуске определяется по формуле: (6.3); а при реакторном пуске, пренебрегая сопротивлением реактора - (6.4)
 (6.3);
(6.3);  (6.4)
(6.4)
Следовательно,
при реакторном пуске начальный пусковой
ток уменьшается в ![]() раз.
Во столько же раз уменьшается и напряжение
на зажимах двигателя в начальный момент
пуска. Начальный пусковой момент при
реакторном пуске уменьшается по сравнению
с моментом при прямом пуске в
раз.
Во столько же раз уменьшается и напряжение
на зажимах двигателя в начальный момент
пуска. Начальный пусковой момент при
реакторном пуске уменьшается по сравнению
с моментом при прямом пуске в ![]() раз.
раз.
Недостаток этого способа пуска - уменьшение напряжения сопровождается уменьшением пускового момента.
Автотрансформаторный пуск асинхронного двигателя с короткозамкнутым ротором
Автотрансформаторный пуск осуществляется в следующем порядке. Сначала через автотрансформатор на статор двигателя подается пониженное напряжение. При этом пусковой ток асинхронного двигателя с короткозамкнутым ротором, измеренный на выходе автотрансформатора, уменьшается в К раз, где К — коэффициент трансформации автотрансформатора. Что же касается тока на входе автотрансформатора, то он уменьшается в К2 раз по сравнению с пусковым током при прямом включении двигателя в сеть. Дело в том, что в понижающем автотрансформаторе первичный ток меньше вторичного в К раз и поэтому уменьшение пускового тока при автотрансформаторном пуске составляет К2 раз.
Таким образом, при автотрансформаторном пуске момент и ток асинхронного двигателя уменьшаются одинаково
После достижения ротора двигателя определенной частоты вращения выключатель отключается, и двигатель получает питание через часть обмотки автотрансформатора, который в этом случае работает как реактор. Затем включается следующий выключатель, в результате чего двигатель получает полное напряжение.
Пусковые автотрансформаторы рассчитываются на кратковременную работу. Согласно ГОСТ 3211—46, пусковые автотрансформаторы должны иметь ответвления, соответствующие величинам вторичного напряжения 45, 36 и 27%. В каждом конкретном случае выбирается подходящая ступень напряжения.
Как и предыдущие способы пуска при пониженном напряжении, автотрансформаторный способ пуска сопровождается уменьшением пускового момента. С точки зрения уменьшения пускового тока автотрансформатор-ный способ пуска лучше реакторного, но повышенная стоимость пусковой аппаратуры ограничивают применение этого способа пуска.
Пуск асинхронного двигателя с короткозамкнутым ротором при изменении частоты питающей сети f1
Этот способ позволяет плавно изменять угловую частоту вращения ротора в наиболее широком диапазоне и, следовательно, позволяет уменьшить пусковые токи. Для его осуществления требуется, чтобы двигатель получал питание от отдельного источника. В качестве такого источника могут быть использованы электромеханические или статические преобразователи частоты. В связи с развитием полупроводниковой техники в настоящее время наиболее предпочтительными являются полупроводниковые статические преобразователи.
При частотном пуске одновременно с изменением частоты f1 приходится изменять и подводимое напряжение U1.
Максимальный
момент (пренебрегая сопротивлением
r1):  (6.5)
(6.5)
где КД — постоянный коэффициент асинхронного двигателя с короткозамкнутым ротором.
Отношение
моментов Мmах при двух значениях частоты
будет равно: ![]() (6.6)
(6.6)
В общем
виде закон изменения U1 при регулировании
частоты f1:  (6.7)
(6.7)
Если при пуске требуется, чтобы Мmах на механических характеристиках при любой частоте f1 оставался неизменным (пуск с постоянным моментом), то получим
![]() (6.8)
или:
(6.8)
или: ![]() (6.9)
(6.9)
Откуда следует, что для пуска необходимо подводимое напряжение изменять пропорционально его частоте.
При осуществлении закона регулирования (6.9) основной магнитный поток машины при различных значениях частоты f1 практически остается неизменным, т. е.
![]() (6.10)
(6.10)
При частотном пуске двигателя его энергетические характеристики остаются неизменными. Поэтому этот способ пуска является экономичным. Недостатками являются громоздкость и высокая стоимость источника питания.
Из-за наличия фильтров индикации, показания приборов носят приближенный характер и не позволяют сопоставить значения токов при различных пусках. Поэтому измерение пусковых токов осуществляется призаторможенном роторе асинхронного двигателя.
Двигатель при пуске не разворачивается или скорость его вращения ненормальная. Причинами указанной неисправности могут быть механические и электрические неполадки.
К электрическим неполадкам относятся: внутренние обрывы в обмотке статора или ротора, обрыв в питающей сети, нарушения нормальных соединений в пусковой аппаратуре. При обрыве обмотки статора в нем не будет создаваться вращающееся магнитное поле, а при обрыве в двух фазах ротора в обмотке последнего не будет тока, взаимодействующего с вращающимся полем статора, и двигатель не сможет работать. Если обрыв обмотки произошел во время работы двигателя, он может продолжать работать с номинальным вращающим моментом, но скорость вращения сильно понизится, а сила тока настолько увеличится, что при отсутствии максимальной защиты может перегореть обмотка статора или ротора.
В случае соединения обмоток двигателя в треугольник и обрыва одной из его фаз двигатель начнет разворачиваться, так как его обмотки окажутся соединенными в открытый треугольник, при котором образуется вращающееся магнитное поле, сила тока в фазах будет неравномерной, а скорость вращения — ниже номинальной. При этой неисправности ток в одной из фаз в случае номинальной нагрузки двигателя будет в 1,73 раза больше, чем в двух других. Когда у двигателя выведены все шесть концов его обмоток, обрыв в фазах определяютмегаомметром. Обмотку разъединяют и измеряют сопротивление каждой фазы.
Скорость вращения двигателя при полной нагрузке ниже номинальной может быть из-за пониженного напряжения сети, плохих контактов в обмотке ротора, а также из-за большого сопротивления в цепи ротора у двигателя с фазным ротором. При большом сопротивлении в цепи ротора возрастает скольжение двигателя и уменьшается скорость его вращения.
Сопротивление в цепи ротора увеличивают плохие контакты в щеточном устройстве ротора, пусковом реостате, соединениях обмотки с контактными кольцами, пайках лобовых частей обмотки, а также недостаточное сечение кабелей и проводов между контактными кольцами и пусковым реостатом.
Плохие контакты в обмотке ротора можно выявить, если в статор двигателя подать напряжение, равное 20—25% номинального. Заторможенный ротор медленно поворачивают вручную и проверяют силу тока во всех трех фазах статора. Если ротор исправен, то при всех его положениях сила тока в статоре одинакова, а при обрыве или плохом контакте будет изменяться в зависимости от положения ротора.
Плохие контакты в пайках лобовых частей обмотки фазного ротора определяют методом падения напряжения. Метод основан на увеличении падения напряжения в местах недоброкачественной пайки. При этом замеряют величины падения напряжения во всех местах соединений, после чего результаты измерений сравнивают. Пайки считаются удовлетворительными, если падение напряжения в них превышает падение напряжения в пайках с минимальными показателями не более чем на 10%.
У роторов с глубокими пазами может также происходить разрыв стержней из-за механических перенапряжений материала. Разрыв стержней в пазовой части короткозамкнутого ротора определяют следующим образом. Ротор выдвигают из статора и в зазор между ними забивают несколько деревянных клиньев, чтобы ротор не мог повернуться. К статору подводят пониженное напряжение не более 0,25 Uном. На каждый паз выступающей части ротора поочередно накладывают стальную пластину, которая должна перекрывать два зубца ротора. Если стержни целые, пластина будет притягиваться к ротору и дребезжать. При наличии разрыва притяжение и дребезжание пластины исчезают.
Двигатель разворачивается при разомкнутой цепи фазного ротора. Причина неисправности — короткое замыкание в обмотке ротора. При включении двигатель медленно разворачивается, а его обмотки сильно нагреваются, так как в замкнутых накоротко витках вращающимся полем статора наводится ток большой величины. Короткие замыкания возникают между хомутиками лобовых частей, а также между стержнями при пробое или ослаблении изоляции в обмотке ротора.
Это повреждение определяют тщательным внешним осмотром и измерением сопротивления изоляции обмотки ротора. Если при осмотре не удается обнаружить повреждение, то его определяют по неравномерному нагреву обмотки ротора на ощупь, для чего ротор затормаживают, а к статору подводят пониженное напряжение.
Равномерный нагрев всего двигателя выше допустимой нормы может получиться в результате длительной перегрузки и ухудшения условий охлаждения. Повышенный нагрев вызывает преждевременный износ изоляции обмоток.
Местный нагрев обмотки статора, который обычно сопровождается сильным гудением, уменьшением скорости вращения двигателя и неравномерными токами в его фазах, а также запахом перегретой изоляции. Эта неисправность может возникнуть в результате неправильного соединения между собой катушек в одной из фаз, замыкания обмотки на корпус в двух местах, замыкания между двумя фазами, короткого замыкания между витками в одной из фаз обмотки статора.
При замыканиях в обмотках двигателя вращающимся магнитным полем в короткозамкнутом контуре будет наводиться э. д. с, которая создаст ток большой величины, зависящий от сопротивления замкнутого контура. Поврежденная обмотка может быть найдена по величине измеренного сопротивления, при этом поврежденная фаза будет иметь меньшее сопротивление, чем исправные. Сопротивление измеряют мостом или методом амперметра — вольтметра. Поврежденную фазу можно также определить методом измерения тока в фазах, если к двигателю подвести пониженное напряжение.
При соединении обмоток в звезду ток в поврежденной фазе будет больше, чем в других. Если обмотки соединены в треугольник, линейный ток в двух проводах, к которым присоединена поврежденная фаза, будет больше, чем в третьем проводе. При определении указанного повреждения у двигателя с короткозамкнутым ротором последний может быть заторможенным или вращаться, а у двигателей с фазным ротором обмотка ротора может быть разомкнута. Поврежденные катушки определяют по падению напряжения на их концах: на поврежденных катушках падение напряжения будет меньше, чем на исправных.
Местный нагрев активной стали статора происходит из-за выгорания и оплавления стали при коротких замыканиях в обмотке статора, а также при замыкании листов стали вследствие задевания ротора о статор во время работы двигателя или вследствие разрушения изоляции между отдельными листами стали. Признаками задевания ротора о статор являются дым, искры и запах гари; активная сталь в местах задевания приобретает вид полированной поверхности; появляется гудение, сопровождающееся вибрацией двигателя. Причиной задевания служит нарушение нормального зазора между ротором и статором в результате износа подшипников, неправильной их установки, большого изгиб вала, деформации стали статора или ротора, одностороннего притяжения ротора к статору из-за витковых замыканий в обмотке статора, сильной вибрации ро-тора, который определяют щупом.
Ненормальный шум в двигателе. Нормально работающий двигатель издает равномерное гудение, которое характерно для всех машин переменного тока. Возрастание гудения и появление в двигателе ненормальных шумов могут явиться следствием ослабления запрессовки активной стали, пакеты которой будут периодически сжиматься и ослабляться под воздействием магнитного потока. Для устранения дефекта необходимо перепрессовать пакеты стали. Сильное гудение и шумы в машине могут быть также результатом неравномерности зазора между ротором и статором.
Повреждения изоляции обмоток могут произойти от длительного перегрева двигателя, увлажнения и загрязнения обмоток, попадания на них металлической пыли, стружек, а также в результате естественного старения изоляции. Повреждения изоляции могут вызвать замыкания между фазами и витками отдельных катушек обмоток, а также замыкание обмоток на корпус двигателя.
Увлажнение обмоток происходит в случае длительных перерывов в работе двигателя, при непосредственном попадании в него воды или пара в результате хранения двигателя в сыром неотапливаемом помещении и т. д.
Металлическая пыль, попавшая внутрь машины, создает токопроводящие мостики, которые постепенно могут вызвать замыкания между фазами обмоток и на корпус. Необходимо строго соблюдать сроки осмотров и планово-предупредительных ремонтов двигателей.
Сопротивление изоляции обмоток двигателя напряжением до 1000 в не нормируется, изоляция считается удовлетворительной при сопротивлении 1000 ом на 1 в номинального напряжения, но не менее 0,5 Мом при рабочей температуре обмоток.
Замыкание обмотки на корпус двигателя обнаруживают мегаомметром, а место замыкания — способом «прожигания» обмотки или методом питания ее постоянным током.
Способ «прожигания» заключается в том, что один конец поврежденной фазы обмотки присоединяют к сети, а другой — к корпусу. При прохождении тока в месте замыкания обмотки на корпус образуется «прожог», появляются дым и запах горелой изоляции.
Двигатель не идет в ход в результате перегорания предохранителей в обмотке якоря, обрыва обмотки сопротивления в пусковом реостате или нарушения контакта в подводящих проводах. Обрыв обмотки сопротивления в пусковом реостате обнаруживают контрольной лампой или мегомметром.
№19. Механические характеристики асинхронного двигателя. Последовательность расчета механических характеристик асинхронного двигателя с короткозамкнутым ротором на основе паспортных данных.
Механическая характеристика асинхронного двигателя
Под механической характеристикой принято понимать зависимость частоты вращения ротора в функции от электромагнитного моментаn=f(M). Эту характеристику (рис. 2.15) можно получить, используя зависимость M=f(S) и пересчитав частоту вращения ротора при разных значениях скольжения.
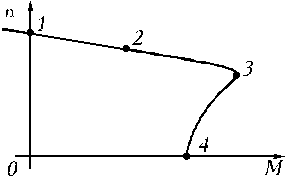
Рис. 2.15
Так как S=(n0−n)/n0, отсюда n=n0(1−S). Напомним, что n0=(60f)/p – частота вращения магнитного поля.
Участок 1-3 соответствует устойчивой работе, участок 3-4 – неустойчивой работе. Точка 1 соответствует идеальному холостому ходу двигателя, когда n=n0. Точка 2 соответствует номинальному режиму работы двигателя, ее координаты Mн и nн. Точка 3 соответствует критическому моменту Mкр и критической частоте вращения nкр. Точка 4 соответствует пусковому моменту двигателя Mпуск. Механическую характеристику можно рассчитать и построить по паспортным данным. Точка 1:
n0=(60f)/p,
где: p – число пар полюсов машины; f – частота сети.
Точка 2 с координатами nн и Mн. Номинальная частота вращения nн задается в паспорте. Номинальный момент рассчитывается по формуле:
здесь: Pн – номинальная мощность (мощность на валу).
Точка
3 с координатами Mкрnкр.
Критический момент рассчитывается по
формуле Mкр=Mнλ.
Перегрузочная способность λ задается
в паспорте двигателя nкр=n0(1−Sкр), ![]() , Sн=(n0−nн)/n0 –
номинальное скольжение.
, Sн=(n0−nн)/n0 –
номинальное скольжение.
Точка 4 имеет координаты n=0 и M=Mпуск. Пусковой момент вычисляют по формуле
Mпуск=Mнλпуск,
где: λпуск – кратность пускового момента задается в паспорте.
Асинхронные двигатели имеют жесткую механическую характеристику, т.к. частота вращения ротора (участок 1–3) мало зависит от нагрузки на валу. Это одно из достоинств этих двигателей.
Расчет механической характеристики асинхронного двигателя
Трехфазный асинхронный двигатель с короткозамкнутым ротором питается от сети с напряжением = 380 В при = 50 Гц. Параметры двигателя: Pн= 14 кВт, nн= 960 об/мин, cosφн= 0,85, ηн= 0,88, кратность максимального моментаkм= 1,8.
Определить: номинальный ток в фазе обмотки статора, число пар полюсов, номинальное скольжение, номинальный момент на валу, критический момент, критическое скольжение и построить механическую характеристику двигателя.
Решение. Номинальная мощность, потребляемая из сети
P1н =Pн / ηн = 14 / 0,88 = 16 кВт.
Номинальный ток, потребляемый из сети
![]()
Число пар полюсов
p = 60 f / n1 = 60 х 50 / 1000 = 3,
где n1 = 1000 – синхронная частота вращения, ближайшая к номинальной частоте nн= 960 об/мин.
Номинальное скольжение
sн = (n1 - nн) / n1 = (1000 - 960 ) / 1000 = 0,04
Номинальный момент на валу двигателя
Критический момент
Мк = kм х Мн = 1,8 х 139,3 = 250,7 Н•м.
Критическое скольжение находим подставив М = Мн, s = sн и Мк / Мн = kм.
![]()
Для построения механической характеристики двигателя с помощью n = (n1 - s) определим характерные точки: точка холостого хода s = 0, n = 1000 об/мин, М = 0, точка номинального режима sн = 0,04, nн = 960 об/мин, Мн = 139,3 Н•м и точка критического режима sк = 0,132, nк = 868 об/мин, Мк =250,7 Н•м.
Для точки пускового режима sп = 1, n = 0 находим
По полученным данным строят механическую характеристикудвигателя. Для более точного построения механической характеристики следует увеличить число расчетных точек и для заданных скольжений определить моменты и частоту вращения.
ПАСПОРТНЫЕ ДАННЫЕ ДВИГАТЕЛЯ. РАСЧЕТ И ПОСТРОЕНИЕ МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ
Расчет и построение механической характеристики производят по каталожным данным двигателя.
В каталоге приводятся следующие данные: тип двигателя, Pном, Uном , Iном , nном , ηном , cos φном ,Мmax/Мном = λ.
Для двигателя с короткозамкнутым ротором дополнительно даются отношение пускового момента к номинальному (Мп/Мном) и отношение пускового тока к номинальному (Iп/Iном); для двигателя с фазным ротором — напряжение между кольцами при неподвижном и разомкнутом роторе U2k = E2k и номинальный ток ротора I2ном . Буквенные и цифровые обозначения типа двигателя позволяют, например, судить о назначении двигателя, его габаритной мощности, числе пар полюсов и т. д. Поскольку существует большое число типов двигателей и в каталогах даны пояснения, что означает каждая буква и цифра, останавливаться на этом в книге нет необходимости.
Номинальной мощностью Рном двигателя общего назначения длительного режима работы называется мощность, которую двигатель может длительно развивать на валу, нагреваясь при этом до допустимой температуры, обусловленной классом изоляции его обмоток. В двигателе возникают потери мощности, которые нагревают его. Вначале, когда двигатель имеет температуру окружающей среды, большая часть мощности потерь расходуется на повышение его температуры, а меньшая рассеивается в окружающую среду. С повышением температуры двигателя большая часть мощности потерь рассеивается в окружающую среду. По прошествии определенного времени наступает тепловое равновесие: вся мощность потерь, выделяющихся в двигателе, рассеивается в окружающую среду, и температура двигателя при заданной нагрузке остается неизменной. Повышение температуры двигателя выше допустимой вызывает ухудшение механической и электрической прочности изоляции. При этом изменяется структура изоляции и в конце концов происходит ее пробой и выход двигателя из строя. Можно ли нагружать двигатель мощностью больше номинальной? Можно кратковременно, если до этого двигатель работал с недогрузкой и его температура была ниже допустимой. Длительность и степень перегрузки в совокупности должны быть такими, чтобы в результате температура двигателя не превышала допустимую.
|
Рис. 10.19. График зависимости потока двигателя от намагничива- ющего тока (а); механическая характеристика двигателя с учетом пускового момента Мп, заданного в каталоге (б) |
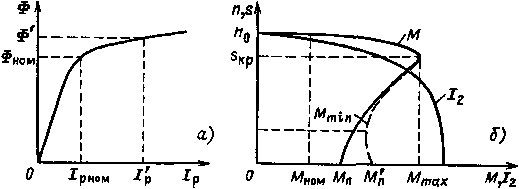
На паспорте двигателя обычно указываются два значения номинального напряжения, например, 380/220 В. Это означает, что данный двигатель рассчитан для работы с напряжением на фазе его обмотки 220 В. Для включения двигателя в сеть с линейным напряжением 380 В его обмотки соединяются звездой, а в сеть с линейным напряжением 220 В — треугольником. Соответственно указываются и два значения линейного номинального тока обмотки статора для соединения звездой и треугольником. Далее в каталоге приводятся номинальные значения частоты вращения, КПД ηном , коэффициента мощности cos φном , которыми обладает двигатель при номинальной нагрузке на его валу. При этом предполагается, что напряжение и частота соответствуют паспортным данным.
Следует отметить, что длительная работа двигателя при повышенном или пониженном напряжении недопустима, особенно при номинальной нагрузке на его валу. В том и другом случае ток в обмотках оказывается больше номинального, двигатель перегревается и выходит из строя. При повышении напряжения, как следует из выражения
U1ф ≈ Е1 = 4,44f1w1Фk01,
в той же степени возрастает и магнитный поток. В результате, как видно из кривой намагничивания (рис. 10.19, а), значительно возрастают ток намагничивания Iр и, следовательно, ток обмотки статора.
При понижении напряжения магнитный поток уменьшается и, как видно из выражения
М = CФI2 cos ψ2,
возрастают выше номинального ток ротора I2 и, следовательно, ток статора I1, так как cos ψ2изменяется незначительно.
Кроме того, при понижении напряжения существенно уменьшаются пусковой и максимальный моменты двигателя, так как они пропорциональны квадрату напряжения.
Работа двигателя допустима при колебании напряжения в сети не более ± 5%Uном.
Влияние отклонения частоты сети от номинального значения на режим работы двигателя рассматривать не будем, так как ощутимых изменений частоты в мощных силовых системах промышленных районов не наблюдается.
Мощность, потребляемая двигателем из сети, при номинальной и любой другой нагрузке может быть определена по формуле
P1 =P2/η = √3UI cos φ.
Отношение Мк/Мном характеризует перегрузочную способность двигателя.
Расчет механической характеристики двигателя обычно производят с помощью упрощенного уравнения механической характеристики (10.57), в котором М и s— координаты механической характеристики двигателя, Мmax и sкр — его параметры.
Значение Мmax определяют по формуле
(10,58a)
Мmax = λМmax = λ |
975Рном |
[кГс • м] = λ |
9550Рном |
[Н•м], |
nном |
nном |
a sкр — по формуле (10.58).
Полученные значения Мmax и sкр подставляют в уравнение (10.57), задаются рядом значений s и подсчитывают соответствующий момент, а по формуле n = n0(1 - s) — частоту вращения [см. (10.23)]. Необходимо обратить внимание на то, что расчетное значение момента Мп при s = 1, который называется начальным пусковым моментом асинхронного короткозамкнутого двигателя, обычно меньше действительного значения М'п, указанного в каталоге, и механическая характеристика в зоне s ≈ 0,7 ÷ 0,9 имеет «провал», где Мmin < М'п (рис. 10.19, б). Причиной этого являются неточность расчетного уравнения и такие неучтенные явления, как, например, вытеснение тока ротора к поверхности проводника и влияние гармонических составляющих вращающегося магнитного поля двигателя. Практически расчетную механическую характеристику корректируют так, как изображено пунктирной линией на рис. 10.19, б.
Расчет и построение графика зависимости тока фазы обмотки ротора от скольжения I2 = f(s) (рис. 10.19) для двигателя с контактными кольцами наиболее просто произвести, если воспользоваться выражением (10.41), из которого следует, что
(10.59)
I2 = |
√ |
Mω0s |
. |
3r2 |
В уравнение (10.59) подставляют значения s и М, полученные из расчета механической характеристики, и определяют I2. Активное сопротивление фазы ротора r2, входящее в это выражение, можно определить из (10.41), если вместо текущих значений М, s и I2 подставить в него их номинальные значения и решить относительно r2:
r2 = |
Mном ω0 sном |
. |
3I2ном2 |
Однако на практике r2 определяют чаще из выражения (10.29), в котором следует положить s =sном I2 = I2ном, а членом x2s пренебречь ввиду его относительной малости по сравнению с r2. С учетом сделанных замечаний расчетная формула приобретает вид
(10.59a)
r2 = |
E2кsном |
. |
√3I2ном |
Корень из трех появился в выражении (10.59а) вследствие того, что в каталоге дано линейное значение E2к.
С помощью графика зависимости тока ротора I2 от скольжения производят выбор сечения, материала и конструкции пусковых и регулировочных реостатов.
Расчет и построение графика зависимости тока статора I от скольжения довольно сложны; практически такой график редко используется, и поэтому методику его расчета мы опускаем.
№20. Типовые схемы пуска и реверсирования асинхронных двигателей с короткозамкнутым ротором
Реверсивный пуск асинхронного двигателя с короткозамкнутым ротором
Такая схема запуска приведена на рис. 2. Пуск двигателя начинается с включения рубильника (Q). При нажатии кнопки «вперед» (SB1) образуется цепь тока, катушки контактора (KM1). Замыкаются силовые контакты (KM) и шунтирующий блок-контакт, а контакт (KM1) в цепи контактора (KM2) размыкается. При нажатии кнопки «назад» (SB3) контактор (KM1) разомкнется и двигатель остановится. Контакт (KM1) в цепи катушки (KM2) замыкается, следовательно, образуется цепь включения контактора (KM2), который замыкает свои силовые контакты. Двигатель резко тормозит и по достижении скольжения равного единице (S=1) останавливается и ротор начинает вращаться в обратную сторону, то есть происходит реверс двигателя.
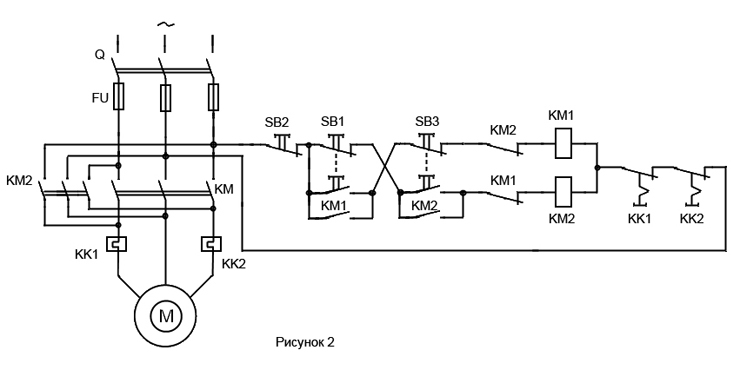
Размыкающие контакты (KM1, KM2), которые введены в цепь разноименных катушек контакторов, выполняют защиту от одновременного включения обоих контакторов, то есть осуществляют блокировку. Для зажиты двигателя от токов короткого замыкания установлены плавкие предохранители (FU), для защиты от перегрузок – тепловое реле (KK1, KK2).
Типовые схемы релейно-контакторного управления АД строятся по тем же принципам, что и ДПТ.
Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
|
|
|
|
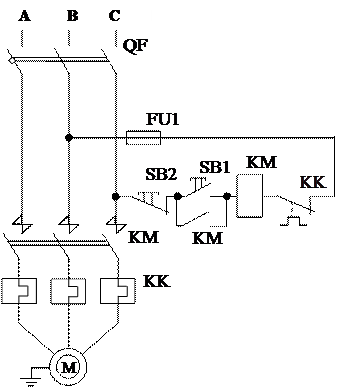
Рисунок 1 - Схема управления короткозамкнутым АД с магнитным пускателем
Схема управления асинхронным двигателем с использованием магнитного пускателя (рис.1) включает в себя магнитный пускатель, состоящий из контактора КМ и трех встроенных в него тепловых реле защиты КК. Схема обеспечивает прямой (без ограничения тока и момента) пуск АД, отключение его от сети, а также защиту цепей управления от коротких замыканий (предохранители FU), а электродвигателя от коротких замыканий (автоматический выключатель QF) и перегрузки (тепловые реле КК). Для пуска АД замыкают выключатель QF и нажимают кнопку пуска SB1.Получает питание катушка магнитного пускателя КМ и силовыми контактами в цепи статора АД подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SB1. Происходит разбег АД по его естественной характеристике. Для отключения АД нажимается кнопка остановки SB2, контактор КМ теряет питание и отключает АД от сети.Начинается процесс торможения АД выбегом под действием момента нагрузки на его валу.
Реверсивная схема управления асинхронным двигателем. Основным элементом этой схемы является реверсивный магнитный пускатель, который включает в себя два линейных контактора КМ1 и КМ2 и тепловое реле КК (рисунок 2).
|
|
|
|
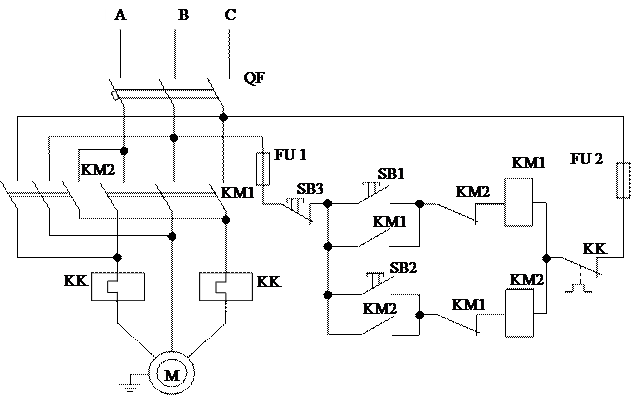
Рисунок 2 - Схема управления короткозамкнутым АД с
реверсивным магнитным пускателем
Схема обеспечивает прямой пуск и реверс АД, а также торможение противовключением при ручном (неавтоматическом) управлении.
В схеме предусмотрена защита от перегрузок АД (реле КК) и коротких замыканий в цепях статора (автоматический выключатель QF) и управления (предохранители FU).Кроме того, схема управления осуществляет нулевую защиту от исчезновения напряжения сети (контакторы КМ1 и КМ2).
Пуск двигателя в условных направлениях «Вперед» или «Назад» осуществляется нажатием соответственно кнопок SB1 или SB2. Это приводит к срабатыванию контактора КМ1 или КМ2 и подключению АД к сети (при включенном автоматическом выключателе QF).
Для реверса или торможения АД вначале нажимается кнопка SB3, что приводит к отключению включенного до сих пор контактора (например, КМ1), после чего нажимается кнопка SB2. Это приводит к включению контактора КМ2 и подаче на АД напряжения источника питания с другим порядком чередования фаз. Магнитное поле АД изменяет свое направление вращения и начинается процесс реверса, состоящий из двух этапов-торможения противовключением и разбега в противоположную сторону.
В случае необходимости только затормозить АД, должна быть нажата кнопка SB3, что приведет к отключению АД от сети и возвращению схемы в исходное положение.
Во избежание короткого замыкания в цепи статора, которое может возникнуть в результате одновременного ошибочного нажатия кнопок SB1 и SB2, в реверсивных магнитных пускателях иногда предусматривается специальная механическая блокировка.Она представляет собой рычажную систему, которая предотвращает втягивание одного контактора, если включен другой. В дополнение к механической блокировки в схеме используется типовая электрическая блокировка, применяемая в реверсивных схемах управления. Она предусматривает перекрестное включение размыкающих контактов аппарата КМ1 в цепи катушки аппарата КМ2 и наоборот.
Отметим, что повышению надежности и удобства в эксплуатации способствует использование в схеме воздушного автоматического выключателя QF. Его наличие исключает возможность работы привода при обрыве одной фазы, при однофазном коротком замыкании, как это имеет место при установке предохранителей, а также он не требует замены элементов (как в предохранителях при сгорании их плавкой вставки).
Схема управления многоскоростным асинхронным двигателем обеспечивает получение двух скоростей АД путем соединения секций обмотки статора в треугольник или двойную звезду.
Типовая схема управления асинхронным двигателем, обеспечивающая прямой пуск и динамическое торможение в функции времени.
Пуск двигателя осуществляется нажатием кнопки SB1 (рис. 3), после чего срабатывает линейный контактор КМ, подключающий двигатель к источнику питания.Одновременно с этим замыкание контакта КМ в цепи реле времени КТ вызовет его срабатывание и замыкание его контакта в цепи контактора торможения КМ1. Однако последний не срабатывает, так как перед этим разомкнулся в этой цепи размыкающий контакт КМ.
|
|
|
|
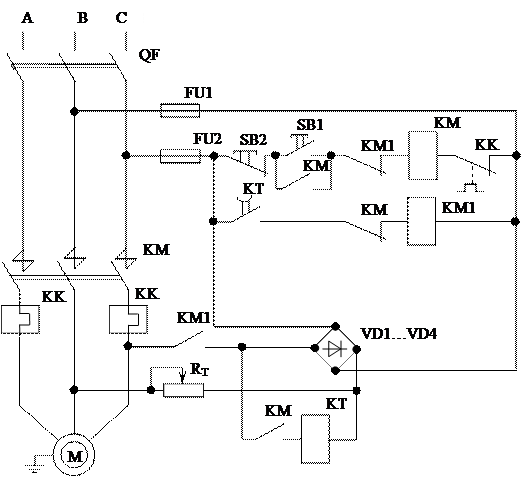
Рисунок 3 - Схема управления пуском и динамическим торможением короткозамкнутого АД
Для остановки АД нажимается кнопка SB2. Контактор КМ отключается, размыкая свои контакты в цепи статора АД и отключая тем самым его от сети переменного тока.Одновременно с этим замыкается контакт КМ в цепи аппарата КМ1 и размыкается контакт КМ в цепи реле КТ. Это приводит к включению контактора торможения КМ1, подаче в обмотки статора постоянного тока от выпрямителя ВД через резистор RT и переводу двигателя в режим динамического торможения. Реле времени КТ, потеряв питание, начинает отсчет выдержки времени. Через интервал времени, соответствующий времени останова АД, реле КТ размыкает свой контакт в цепи контактора КМ1, тот отключается, прекращая подачу постоянного тока в цепь статора. Схема возвращается в исходное положение.
Интенсивность динамического торможения регулируется резистором RT, с помощью которого устанавливается необходимый постоянный ток в статоре АД.
Для исключения возможности одновременного подключения статора к источникам переменного и постоянного тока в схеме использована типовая блокировка с помощью размыкающих контактов КМ и КМ1, включенных перекрестно в цепи катушек этих аппаратов
№21 Особенности конструкции и способы пуска трехфазного асинхронного двигателя с фазным ротором.
В фазы соединяют "звездой". Если же напряжение сети 220 В, то обмотки соединяют в "треугольник". В обоих случаях фазное напряжение двигателя равно 220 В.
Ротор трехфазного асинхронного двигателя представляет собой цилиндр, набранный из штампованных листов электротехнической стали и насаженный на вал. В зависимости от типа обмотки роторы трехфазных асинхронных двигателей делятся на короткозамкнутые и фазные.
а)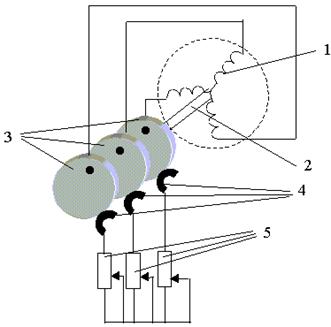 б)
б)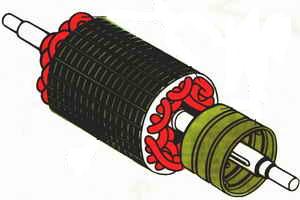
Рисунок 1,а – Схема включения асинхронного двигателя с фазным ротором, 1,б – внешний вид ротора.
Статор у асинхронного двигателя с фазным ротором такой, как и у асинхронного двигателя с короткозамкнутым ротором.
В асинхронных электродвигателях большей мощности и специальных машинах малой мощности для улучшения пусковых и регулировочных свойств применяются фазные роторы. В этих случаях на роторе укладывается трехфазная обмотка с геометрическими осями фазных катушек (1), сдвинутыми в пространстве друг относительно друга на 120 градусов.
Фазы обмотки соединяются звездой и концы их присоединяются к трем контактным кольцам (3), насаженным на вал (2) и электрически изолированным как от вала, так и друг от друга. С помощью щеток (4), находящихся в скользящем контакте с кольцами (3), имеется возможность включать в цепи фазных обмоток регулировочные реостаты (5).
Асинхронный двигатель с фазным ротором имеет лучшие пусковые и регулировочные свойства, однако ему присущи большие масса, размеры и стоимость, чем асинхронному двигателю с короткозамкнутым ротором.
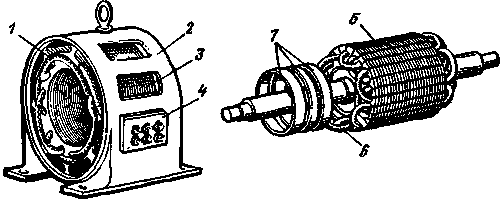
Рис. 2 Статор и ротор асинхронного двигателя с фазным ротором: 1 - обмотка статора; 2 - корпус; 3 - сердечник статора; 4 -коробка с выводами; 5 - сердечник ротора; 6 - обмотка ротора; 7 -контактные кольца
Как показано ниже, в двигателях с фазным ротором имеется возможность с помощью пускового реостата увеличивать пусковой момент до максимального значения и уменьшать пусковой ток. Следовательно, такие двигатели можно применять для привода машин и механизмов, которые пускают в ход при большой нагрузке (электроприводы грузоподъемных машин и пр.).
Способы пуска
Для
приводов с наиболее тяжелыми условиями
пуска следует использовать двигатели
с фазной обмоткой ротора. Введение
сопротивления в цепь ротора
позволяет, с одной стороны. ограничить
пусковой ток двигателя, а с другой
стороны — повысить пусковой момент.
Схема включения сопротивлений (резисторов)
в цепь ротора двигателя изображена на
рис. 24,б.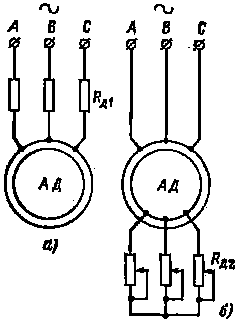
Последовательно изменяя по мере увеличения частоты вращения двигателя сопротивление в цепи ротора, можно добиться того, чтобы весь процесс пуска проходил при вращающем моменте, близком к максимальному. Это позволяет получить возможно меньшее время пуска двигателя.
Рис. 24. Схемы асинхронных двигателей с введением сопротивлений-резисторов в цепь статора (а) и в цепь ротора (б).
Рассмотрим пуск двигателя с фазным ротором с помощью ступенчатого металлического реостата (рис. 28-3), управляемого контакторами К-.
Перед
пуском щетки должны быть опущены на
контактные кольца ротора, а все ступени
реостата включены. Далее в процессе
пуска поочередно включаются контакторы
КЗ, К2, К1- Характеристики вращающего
момента двигателя М = / (s) и вторичного
тока /2 = = / (s) при работе на разных ступенях
реостата изображены на рис. 28-4, а и б.
Предположим, что сопротивления ступеней
пускового реостата и интервалы времени
переключения ступеней подобраны так,
что момент двигателя М при пуске меняется
в пределах от некоторого Мма((С до
некоторого Ммин и при включении в сеть
Мп = Ммакс > Л4СГ (кривая 3 на рис. 28-4, а).
В начале пуска двигатель работает по
характеристике 3, ротор приходит во
вращение, скольжение s начинает
уменьшаться, и при s = s3, когда М = ММИн>
производится переключение реостата на
вторую ступень. При этом двигатель будет
работать по характеристике 2, и при
дальнейшем разбеге двигателя скольжение
уменьшится от s = s3 до s — s2, а момент —-
от 'значения М = Мшкс до М = Ммин. Затем
производится переключение на первую
ступень и т. д. После
выключения
последней ступени реостата двигатель
переходит на работу по естественной
характеристике 0 и достигает установившейся
скорости вращения.
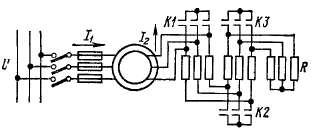
Рис. 28-3. Схема пуска асинхронного двигателя с помощью пускового реостата.
№23 Механические характеристики асинхронного двигателя в тормозных режимах. Типовые схемы торможения асинхронных двигателей.
Тормозные режимы асинхронных машин
При работе многих производственных механизмов возникает необходимость в быстрой остановке (торможении) двигателя. Для этой цели широко используются механические тормоза, но асинхронная машина может сама выполнять функции тормозного устройства, работая в одном из тормозных режимов. При этом механические тормоза используются как запасные или аварийные, а также для удержания механизма в неподвижном состоянии.
Различают следующие тормозные режимы асинхронных машин:
генераторное торможение;
динамическое торможение;
торможение противовключением.