

Построение частной математической модели ск
Задача построения полной математической модели СК в настоящее время не решена. Как правило, разрабатываются частные модели [5]. В данном методе поставим задачу по построению системы стабилизации ротора.
При построении модели примем следующие условия:
-рассматривается только движение ротора относительно магнитного поля статора. Основным параметром в этом случае является угол δ между магнитной осью ротора и вектором магнитной индукции статора ;
-при составлении уравнений движения ротора считаем, что регуляторы токов продольной и поперечной обмоток независимы (в соответствие с параграфами «Синхронный компенсатор как объект управления» и «Автоматические регуляторы возбуждения синхронных компенсаторов») ;
-приращения значений моментов, действующих на ротор, незначительные.
Согласно [6] составим уравнение моментов, действующих на ротор
J⋅δ''= ∑M. (1.8)
где: J- момент инерции ротора.
∑М = Мс+ Мр , (1.9)
подставив Мс и Мр из уравнения моментов(1.4) получим
J⋅δ''=
 sinδ
+
∙
sinδ
+
∙
 sin2δ.
(1.10)
sin2δ.
(1.10)
В данное уравнение подставим Eq из (1.6) уравнение примет следующий вид:
J⋅δ''
=
∙ +
∙
+
∙
 . (1.11)
. (1.11)
J⋅δ''
=
∙
 . (1.12)
. (1.12)
При максимальном значении потребляемой реактивной мощности δ=π/2, тогда подставим данное значение в уравнение (1.13) и оно примет вид:
J⋅δ''
=
∙
 . (1.13)
. (1.13)
Для поперечной обмотки в режиме потребления максимальной мощности δ ≈ 0, а следовательно sin 2δ ≈ 2δ. Из этого следует:
J⋅δ''
-
∙
 =
∙
=
∙ 2 . (1.14)
2 . (1.14)
Далее подставляя любые числовые значения для J, xd, xq и Uш из любых технических характеристик СК, получим числовое уравнения со всеми известными переменными.
Построение структурной схемы системы управления ск
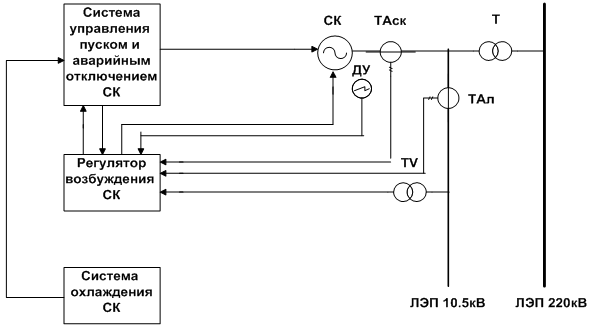
Рис.1.4 Структурная схема системы управления СК:
СК- синхронный компенсатор;
ТАск- трансформатор тока СК;
ТАл- трансформатор тока линии;
Т- силовой трансформатор;
TV- измерительный трансформатор напряжения;
ДУ- датчик углового положения ротора СК.
Функционально СУ можно считать совокупностью следующих подсистем:
- система охлаждения обеспечивает температурный режим обмоток и магнитопроводов СК. В нашем случае система охлаждения двухконтурная (первый контур водородный, второй водяной). При отказе системы охлаждения начинает работу система аварийного отключения;
- система управления пуском и аварийного отключения предназначена для пуска (как правило пуск СК производится в асинхронном режиме) и аварийного отключения СК ;
- регулятор возбуждения предназначен для управления величиной токов возбуждения в обмотках ротора с целью обеспечения максимального значения cosφ в ЛЭП и обеспечения устойчивости работы СК.
Основной задачей при построении структурной схемы является обеспечение стабильного положения ротора СК. У штатной системы управления компенсатором КСВБО 50-11МУ1 ошибка положения ротора равна 3 угл. градуса при погрешности датчика угла 1.5 угл. градуса.
Подробное рассмотрение структурной схемы.
Все параметры звеньев взяты из Приложения 1.
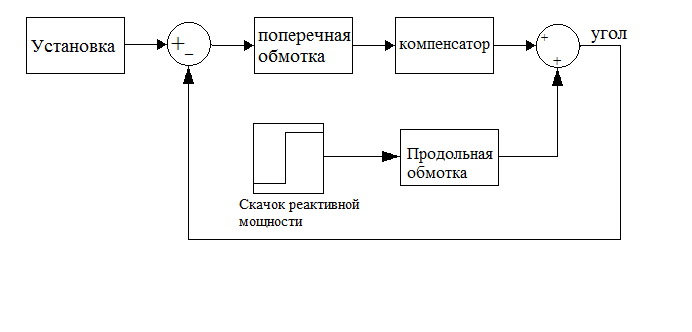
Рис.1.5 Исходная структурная схема системы управления
Исходная схема приведена на рис. 1.5. В схему введены следующие компоненты:
- Установка - задатчик требуемого значения угла δ (в нашем случае δ≡0);
- Поперечная обмотка - обмотка предназначена для стабилизации положения ротора СК с постоянной времени Tq .
- Продольная обмотка - обмотка предназначена для регулирования cosφ сети (реактивной мощности) с постоянной времени Td .
- Компенсатор – одноэтапный объект компенсации .
Из рис.1.5 видно, что система является структурно-неустойчивой. Для таких систем устойчивость обеспечивается введением форсирующих звеньев и изменением структурной схемы системы [5]. Схемы подобного рода слабо освещены в литературе и единого метода их построения не существует.
При построение системы приведенной на рис.1.5 происходит расходящийся переходный процесс. Т.е. появляется необходимость компенсировать наличие в СУ индуктивности поперечной обмотки. Поэтому добавим в схему форсирующий конденсаторов [5].
Структурная схема СУ с учетом всех входящих звеньев ( тиристорный преобразователь тока возбуждения поперечной обмотки учитывается как пропорциональное звено) приведена на рис. 1.5.
Так же необходимое расположение сигналов при выходе на монитор СУ на рисунке: нижний- возмущающее воздействие, средний- ошибка системы ∆δ, верхний- выходной сигнал δ.
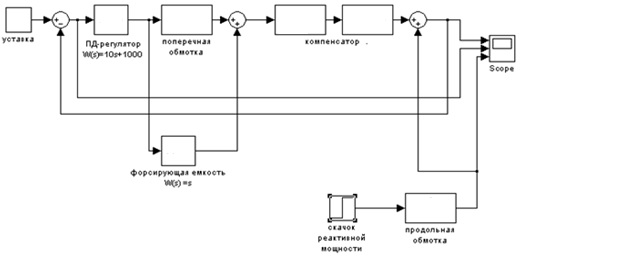
Рис.4.5 Полная структурная схема СУ-q