

Автоматические регуляторы возбуждения синхронных компенсаторов с поперечной обмоткой ротора
Реверсивное изменение возбуждения СК с дополнительной удерживающей обмоткой ротора, расположенной по поперечной его о.си, создается, как указывалось, двумя тиристорными возбудителями VST1, VST2 (рис. 1.3), состоящими каждый из двух встречно включенных тиристорных выпрямителей, подключенных через трансформатор Т к выводам обмоток статора, управляемых двумя автоматическими регуляторами возбуждения APB-d и APB-q.
Алгоритмы функционирования автоматических регуляторов определяются их назначением. Регулятор APB-d обеспечивает поддержание напряжения Uш на шинах путем изменений генерируемой или потребляемой СК реактивной мощности. На него возлагается и задача демпфирования качаний синхронных генераторов электростанций путем создания принужденных колебаний напряжения на шинах с частотой колебаний роторов генераторов с фазой, обеспечивающей эффективное их затухание.
Это достигается использованием сигнала по изменениям активной мощности ∆'Р в линии электропередачи, формируемого реальным дифференцирующим звеном. Регулирующее воздействие Uper.d определяется суммой сигналов, отображающих отклонение напряжения ∆U = Uпр — Uш, производной напряжения и изменения ∆'Р мощности.
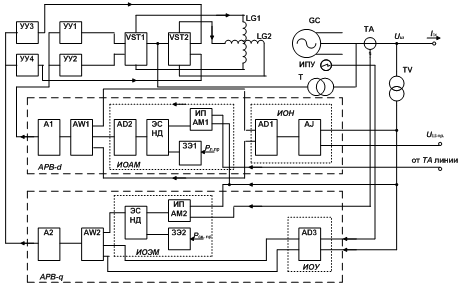
Рис. 1.3 Функциональная схема автоматической системы регулирования возбуждения синхронного компенсатора с поперечной обмоткой ротора.
Сигнал, формируемый по производной напряжения, является стабилизирующим автоматическую систему регулирования возбуждения по продольной оси — предотвращает ее переход в неустойчивое автоколебательное состояние из-за обычно весьма высоких значений коэффициента ku усиления сигнала по отклонению напряжения (ku > 100).
Алгоритм автоматического регулирования возбуждения по поперечной оси определяется его назначением, состоящим в удержании ротора в положении по продольной оси, т.е. при угле δ = 0, в режиме потребления реактивной мощности при отрицательном токе возбуждения Iвd в продольной обмотке возбуждения LGl и демпфирования колебаний ротора в режиме исскуственной устойчивости СК. Поэтому регулятором APB-q используются сигналы по отклонению угла ∆δ от δ = 0, его производной и отклонению (появлению) электромагнитного момента — активной мощности на валу СК.
Автоматические регуляторы APB-d и АРВ-q содержат измерительные органы (рис. 1.3): напряжения ИОН с дифференциатором AD1, активной мощности линии ИОАМ с реальным дифференциатором AD2; угла положения ротора ИОУ с дифференциатором AD2 и электромагнитного момента ИОЭМ на валу СК. Измерительные органы ИОАМ и ИОЭМ содержат измерительные преобразователи мощности линии ИПАМ1 и синхронного компенсатора ИПАМ2; их задающие элементы ЗЭ1, ЗЭ2 устанавливают сигналы, отображающие установленную передаваемую мощность по линии Рл.пр и мощность Рск.пр, определяемую главным образом его вентиляцией.
Измерительные части регуляторов выполняются на интегральных микросхемах: ИОН с использованием управляемых интеграторов AJ, как и в микросхемном аналоговом АРВ-СДП синхронных генераторов , а измерительный орган угла ИОУ — аналогично описанному измерительному органу автоматического регулятора знакопеременного возбуждения СК без поперечной обмотки .
После суммирования сигналов измерительных органов интегральными сумматорами AWl, AW2 исполнительными усилителями Al, А2 они преобразуются в регулирующие воздействия Uperd, Uperq на устройства управления УУ1-УУ4 тиристорами возбудителей через разделительные диоды: разнополярные напряжения Uperd и Uperq воздействуют на разные тиристорные выпрямители возбудителей VST1, VST2 синхронного компенсатора GC [1,4].