

Лекція №25 Характеристика мікропроцесора к1810вм86
Основний мікропроцесор К1810ВМ86 має наступні характеристики:
Тактова частота - 5МГц
Корпус - 40 контактний
Розрядність - 16
Діапазон адресації - до 1 Мб для пам'яті, 64 Кб для пристроїв введення-виводу
Передача даних і адреси - по одній фізичній лінії з мультиплексуванням за часом (дані після адреси).
Мікропроцесор К1810ВМ86 має два режими роботи : мінімальний і максимальний. У мінімальному режимі мікропроцесор формує сигнали, що управляють, для пам'яті і пристроїв введення-виводу, забезпечуючи однопроцесорний режим роботи. У максимальному режимі сигнали управління пам'яттю і пристроями введення-виводу формуються контроллером КР1810ВГ88 на підставі інформації про стан мікропроцесора. Лінії, використовувані в мінімальному режимі для управління пам'яттю і пристроями введення-виводу, в максимальному режимі забезпечують апаратну реалізацію багатопроцесорного режиму роботи. Співпроцесор i8087 є 40 -контактную ВІС і призначений для виконання арифметичних операцій з плаваючою комою. При його відсутності вони виконуються програмно що істотно знижує продуктивність системи. Мікропроцесор введення-виведення КМ1810ВМ89 зазвичай працює під управлінням центрального процесора К1810ВМ86, але може використовуватися самостійно в контроллерах введення-виводу. Він має два незалежних програмно - керованих каналу введення-виводу, які здійснюють обмін даними по прямому доступу в пам'ять з швидкістю до 1,25 Мб/с. Поєднуючи високу швидкість передачі інформації з програмованою логікою, мікропроцесор КМ1810ВМ89 підвищує ефективність системи, звільняючи центральний процесор від рутинних операцій по обробці інформації пристроїв введення-виводу.
Контроллер переривань К1810ВИ59А призначений для обробки сигналів переривань, що поступають від периферійних пристроїв, і працює спільно з основним мікропроцесором К1810ВМ86. Він приймає запити від восьми джерел, при каскадному підключенні додаткових контроллерів ВИ59А число джерел можна збільшити до 64. Тактовий генератор К1810ГФ84 призначений для формування сигналів частотою 5 Мгц, що синхронізують роботу мікропроцесора К1810ВМ86, крім того, формує сигнали СКИДАННЯ і ГОТОВНІСТЬ. Буферні 8 розрядних регістрів КР580ИР82 і ИР83 використовуються при демультиплексування магістралі адреси - даних мікропроцесора К1810ВМ86. Формувачі магістралі 8 - розрядні КР580ВА86 і ВА87 призначені для забезпечення необхідної потужності інтерфейсних сигналів, що виходять за межі плати, вони є біполярними приймачами з трьох стабільними виходами. Контроллер магістралі КР1810ВГ88 призначений для декодування байта стану мікропроцесора КМ1810ВМ89 або ВМ86 (у максимальному режимі), здійснює генерацію в часі команд і сигналів, що управляють, для системної магістралі. Він також видає сигнал стробування адреси в буферні регістри КР580ИР82 і ИР83 під час демультиплексування адреси - даних від мікропроцесора К1810ВМ86. Арбітр шини КР1810ВБ89 надає системну магістраль одному з декількох задатчиков, які виставили запит на захоплення магістралі для доступу до ресурсів системи, наприклад загальній пам'яті.

Питання:
Опишіть характеристика мікропроцесора К1810ВМ86?
Література:
А.В. Белов Создаем устройства на микроконтроллерах Год: 2007
Гусев В.Г., Гусев Ю.М. Электроника
Лекція №26
Мікроконтролер PIC
План
Історія виникнення мікроконтролера
Система команд базового сімейства PIC165x
Перші мікроконтроллери компанії MICROCHIP PIC16C5x з'явилися у кінці 80-х років і завдяки своїй високій продуктивності і низькій вартості склали серйозну конкуренцію вироблюваним у той час 8-розрядним МК з CISC -архитектурой.
Перше, що привертає увагу в PIC -контроллерах - це простота і ефективність. У основу концепції PIC, єдину для усіх сімейств, що випускаються, була покладена RISC -архитектура з системою простих однослівних команд, застосування вбудованої пам'яті програм і даних і мале енергоспоживання.
Система команд базового сімейства PIC165x містить тільки 33 команди. Як не дивно, і це зіграло свою роль в популяризації PIC -контроллеров. Усі команди (окрім команд переходу) виконуються за один машинний цикл (чи чотири машинні такти) з перекриттям за часом вибору команд і їх виконання, що дозволяє досягти продуктивності до 5 MIPS при тактовій частоті 20 Мгц.
Мікроконтроллери PIC мають симетричну систему команд, що дозволяє виконувати операції з будь-яким регістром, використовуючи будь-який метод адресації. Правда, розробники MICROCHIP так і не змогли відмовитися від коханої усіма структури з регістром-акумулятором, необхідним учасником усіх операцій з двома операндами. Зате тепер користувач може зберігати результат операції на вибір, де побажає, в самому регістрі-акумуляторі або в другому регістрі, використовуваному для операції. Нині MICROCHIP випускає чотири основні сімейства 8-розрядних RISC -микроконтроллеров, сумісних від низу до верху за програмним кодом, :
базове сімейство PIC15Cx з 12-розрядними командами, прості недорогі мікроконтроллери з мінімальною периферією;
PIC12Cxxx з 12-розрядними командами зі вбудованим тактовим генератором, що випускаються в мініатюрному 8-вивідному виконанні. Не так давно був анонсований черговий такий "малюк" c внутрішнім 8-розрядним 4-канальним АЦП;
Mid - range PIC16x/7x/8x/9x з 14-розрядними командами. Найбільш численне сімейство, що об'єднує мікроконтроллери з різноманітними периферійними пристроями, до числа яких входять аналогові компаратори, аналогово-цифрові перетворювачі, контроллери послідовних інтерфейсів SPI, USART і I2C, таймери-лічильники, модулі захоплення/порівняння, широко-імпульсні модулятори, сторожові таймери, супервізорні схеми і так далі;
High - end PIC17C4x/5xx високопродуктивних мікроконтроллерів з розширеною системою команд 16-розрядного формату, що працюють на частоті до 33 Мгц, з об'ємом пам'яті програм до 16 Кслов. Окрім великої периферії майже усі мікроконтроллери цього сімейства мають вбудований апаратний помножувач 8г8, що виконує операцію множення за один машинний цикл.
Більшість PIC -контроллеров випускаються з одноразово програмованою пам'яттю програм OTP з можливістю внутрішньосхемного програмування або масочным ROM. Для цілей відладки пропонуються версії з ультрафіолетовим стиранням, потрібно визнати, не дуже дешеві. Повну кількість модифікацій PIC, що випускаються, -контроллеров складає близько п'ятисот найменувань. Як небезпідставно стверджує MICROCHIP, продукція компанії перекриває увесь діапазон застосувань 8-розрядних мікроконтроллерів.
Особливий акцент MICROСHIP робить на максимально можливе зниження енергоспоживання для мікроконтроллерів, що випускаються. При роботі на частоті 4 Мгц PIC -контроллеры, залежно від моделі, мають струм споживання менше 1,5 мА, а при роботі на частоті 32,768 КГц - нижче 15 мкА. Підтримується "сплячий" режим роботи. Діапазон напруги живлення PIC -контроллеров складає 2,0..6,0 В.
Нині готується до запуску у виробництво нове п'яте сімейство PIC -контроллеров PIC18Cxxx. Нові мікроконтроллери матимуть розширене RISC -ядро, оптимізоване під використання нового Сі-компілятора, адресний простір програм до 2 Мбайт, до 4 Кбайт вбудованої пам'яті даних і продуктивність 10 MIPS.
З програмних засобів відладки найбільш відомі і доступні різні версії асемблерів, а також інтегроване програмне середовище MPLAB. Російські виробники програматорів і апаратних налагоджувальних засобів також приділяють увагу PIC -контроллерам. Випускаються як спеціалізовані програматори, такі як PICPROG, що програмують майже увесь спектр PIC -микроконтроллеров, так і універсальні: UNIPRO, СТЕРХ, підтримувальні найбільш відомі версії PIC.
Питання:
Як виник мікропроцесор?
Які команди базового сімейства PIC165x ви знаєте?
Література:
А.В. Белов Создаем устройства на микроконтроллерах Год: 2007
Гусев В.Г., Гусев Ю.М. Электроника
Лекція №27
Опис та схема мікроконтролера
План
Мікроконтро́лер
Опис мікроконтролера
Блок-схема мікроконтролера i8051
Мікроконтро́лер (англ. microcontroller), або однокристальна мікроЕОМ — виконана у вигляді мікросхемиспеціалізована мікропроцесорна система, що включає мікропроцесор, блоки пам'яті для збереження коду програм і даних, порти вводу-виводу і блоки зі спеціальними функціями (лічильники, компаратори, АЦП та інші).
Використовується для керування електронними пристроями. По суті, це — однокристальний комп'ютер, здатний виконувати прості завдання. Використання однієї мікросхеми значно знижує розміри,енергоспоживання і вартість пристроїв, побудованих на базі мікроконтролерів.
Мікроконтролери можна зустріти в багатьох сучасних приладах, таких як телефони, пральні машини, вони відповідають за роботу двигунів і систем гальмування сучасних автомобілів, з їх допомогою створюютьсясистеми контролю і системи збору інформації. Переважна більшість процесорів, що випускаються у світі — мікроконтролери.
Опис
При проектуванні мікроконтролерів доводиться дотримувати баланс між розмірами і вартістю з одного боку і гнучкістю і продуктивністю з іншою. Для різних застосувань оптимальне співвідношення цих і інших параметрів може розрізнятися дуже сильно. Тому існує величезна кількість типів мікроконтролерів, що відрізняються архітектурою процесорного модуля, розміром і типом вбудованої пам'яті, наборомпериферійних пристроїв, типом корпусу.
В той час, як 8-розрядні процесори загального призначення повністю витиснені продуктивнішими моделями, 8-розрядні мікроконтролери продовжують широко використовуватися. Це пояснюється тим, що існує велика кількість застосувань, в яких не потрібна висока продуктивність, але важлива низька вартість. В той же час, є мікроконтролери, з більшими обчислювальними можливостями, наприкладцифрові сигнальні процесори.
Обмеження за ціною і енергоспоживанням стримують також зростання тактової частоти контроллерів. Хоча виробники прагнуть забезпечити роботу своїх виробів на високих частотах, вони, в той же час, надають замовникам вибір, випускаючи модифікації, розраховані на різні частоти і напругу живлення. У багатьох моделях мікроконтролерів використовується статична пам'ять для ОЗП і внутрішніх регістрів. Це дає контролеру можливість працювати на менших частотах і навіть не втрачати дані при повній зупинцітактового генератора. Часто передбачені різні режими енергозбереження, в яких відключається частина периферійних пристроїв і обчислювальний модуль.
Окрім ОЗП, мікроконтролер може мати вбудовану незалежну пам'ять для зберігання програми і даних. У багатьох контролерах взагалі немає шин для підключення зовнішньої пам'яті. Найбільш дешеві типи пам'яті допускають лише одноразовий запис. Такі пристрої підходять для масового виробництва в тих випадках, коли програма контролера не оновлюватиметься. Інші модифікації контролерів мають можливістю багатократного перезапису незалежної пам'яті. На відміну від процесорів загального призначення, в мікроконтролерах часто використовується гарвардська архітектура.
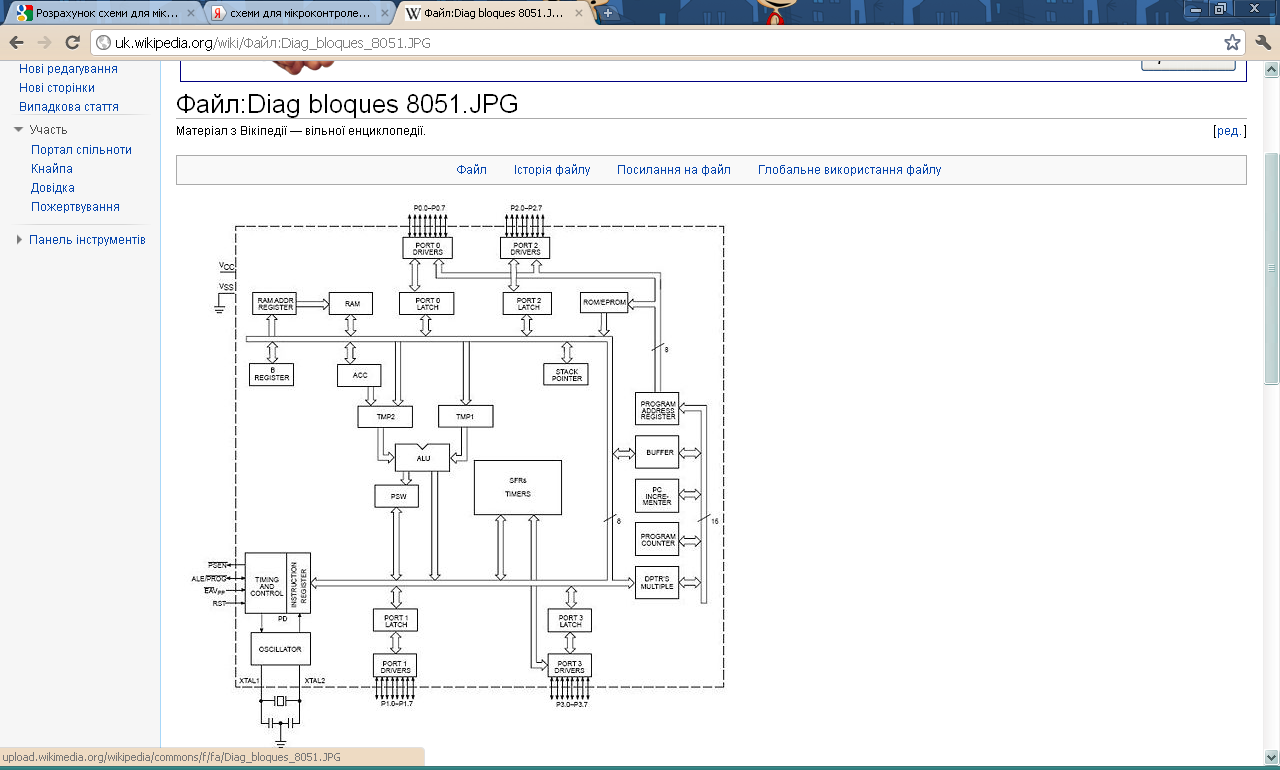
Блок-схема мікроконтролера i8051
Питання:
Що таке мікроконтро́лер?
Які складові частини мікро контролера?
Намалюйте блок-схему мікроконтролера i8051?
Література:
А.В. Белов Создаем устройства на микроконтроллерах Год: 2007
Гусев В.Г., Гусев Ю.М. Электроника
Лекція №28
Система команд мікропроцесора
План
Види команд
Ознаки регістра
Види команд
Залежно від сукупності команд, які може виконувати мікропроцесор, вони поділяються на такі види:
СІSС (Complex Instruction Set Computer) мікропроцесор із повним набором команд (інструкцій) збільшеної довжини. Для підвищення продуктивності передбачається збільшувати тактову частоту мікропроцесора;
RISC (Reduced Instruction Set Computer), де застосовано спрощену систему команд однакового формату. Основними командами є команди типу регістр-регістр. Команди поділено на поля, тому дешифрування таких команд спрощується;
MISC (Multipurpose Instruction Set Computer), де застосовано поєднання команд типу КІ8С із мікропрограмним пристроєм пам'яті.
Всю сукупність команд мікропроцесора можна поділити на такі види:
• команди передачі даних;
• команди арифметичних операцій;
• команди логічних операцій і зсувів;
• команди передачі керування;
• ланцюжкові команди;
• команди керування мікропроцесором.
Для виконання команд мікропроцесор використовує регістри операційного пристрою, які є доступними програмісту для програмування команд. Для зручності регістри мікропроцесора зручно поділити на групи
Група регістрів загального призначення або регістрів даних складається з таких двобайтних регістрів: АХ, ВХ,СХ, DХ. Особливістю цих регістрів е те, що старший (Н) і молодший (L) байти цих регістрів можуть адресуватися окремо.
До складу групи вказівних та індексних регістрів входять двобайтні адресні регістри: SР, ВР, SI, DI. Вони призначені зберігання двобайтних адрес.
Група сегментних регістрів складається з регістра коду команд СS, регістра даних DS. регістра стека SS, регістра додаткових даних ЕS.
Останню групу регістрів складають регістр-вказівник команд ІР або програмний лічильник РС, і регістр ознак.
Біти регістра ознак фіксують властивості результатів арифметичних і логічних операцій, а також призначені для керування певними діями мікропроцесора. Бітами регістра ознак фіксуються такі ознаки:
• АF — додатковий перенос із молодшої тетради (молодшого напівбайта) у старшу тетраду (старший напівбайт);
• СF — перенос, який виникає під час виконання арифметичних і логічних операцій;
• ОF — переповнення, яке виникає під час виконання арифметичних операцій;
• SF— знак результату;
• РF— парність кількості одиниць, які містяться у молодшому байті результату;
• ZF — наявність нульового результату операції;
• DF — визначає напрям перегляду ланцюжкових даних;
• IF— ознака переривання;
• TF — перехід мікропроцесора в покроковий режим.
Питання:
1. Що називають системою команд мікропроцесора?
2. Які є види системи команд?
3. Які є види регістрів?
4. Які регістри входять до групи загального призначення?
5. З чого складається група сегментних регістрів?
Література:
А.В. Белов Создаем устройства на микроконтроллерах Год: 2007