

46. Штормоскоп wx 500: управление работой, режимы cell и strike, отображение зон грозовой деятельности, контроль работоспособности.
Штормоскоп WX 500 имеет два режима. В режиме «CELL» определяются зоны грозовой деятельности с высокой интенсивностью разрядов молний. В режиме «STRIKE» индицируется примерное расположение отдельных, довольно редких разрядов молний.
На экране дисплея MFD отображаются следующие символы:
![]() –
разряд молнии произошёл менее 6 с назад;
–
разряд молнии произошёл менее 6 с назад;
![]() – разряд молнии произошёл от 6 до 60 с
назад;
– разряд молнии произошёл от 6 до 60 с
назад;
![]() –
разряд молнии произошёл от 1 до 2 мин
назад;
–
разряд молнии произошёл от 1 до 2 мин
назад;
![]() – разряд молнии произошёл от 2 до 3 мин
назад.
– разряд молнии произошёл от 2 до 3 мин
назад.
Данные штормоскопа WX 500 используются для отображения отметок разрядов молний на экране дисплея MFD на странице «NAVIGATION MAP» в совмещённом режиме.
Совмещённый режим включается нажатием программируемой клавиши второго уровня с обозначением «STRMSCP» после нажатия клавиши с обозначением «МАР».
В комплексе Garmin G 1000 предусмотрена возможность отображения на экране дисплея MFD отдельно информации только от штормоскопа на странице «MAP–STRMSCP®» (третья страница группы «MAP»). В этом случае на одном из четырёх масштабов 25, 50, 100 или 200 NM отображаются дальномерные кольца, соответствующие выбранному масштабу дальности и соответствующие отметки молний. Страница «MAP–STRMSCP®» отображается всегда с ориентацией по курсу полёта самолёта HDG UP. Информация о курсе самолёта поступает в блок штормоскопа WX 500 от курсовертикали GRS 77.
Возможен выбор, как кругового отображения, так и секторного – в пределах 120° по курсу полёта самолёта.
При использовании штормоскопа в правом нижнем углу появляется условный значок в виде жёлтой стрелки-молнии.
Информация штормоскопа WX 500 отображается также на дисплее PFD в дополнительном окне Insert Map слева.
Управление режимами отображения экипаж может производить также и с помощью клавиши MENU и ручек FMS.
При полном отказе штормоскопа выдаётся уведомляющее сообщение «STRMSCP FAIL» в окне «ALERTS» на дисплее PFD.
47.Принцип измерения истиной высоты полета частотных рв(Радиовысотомеров)
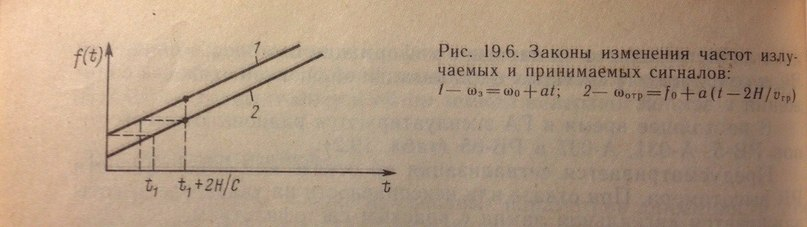
Частотные РВ свободны от ограничений, присущих импульсным и находят широкое применение в ГА. С помощью частотных РВ определяется время задержки принимаемых на ВС сигналов по отношению к излучаемым однако определяется это время иначе чем в импульсных РВ. В частотных РВ используются незатухающие колебания, частота которых изменяется с течением времени по определенному закону. Для уяснения работы РВ предположим, что частота изменяется по линейному закону(F3=F0+at) Частота принимаемых на борту отраженных сигналов также изменяется по линейному закону, который в виду запаздывания сигналов отличается временным сдвигом
fотр+f0+a(t-2H/c)
Видно, что разность сигналов пропорциональна высоте полета. Следовательно измеряя разностною частоту можно измерить высоту полета.
Техгически осуществим сигнал частота которого изменяется по линейному закону в ограниченных пределах, причем в течении первого полупериода она возрастает от своего минимального значения до максимального а в течении вророго уменьшается с той же скоростью с которой происходило ее увеличение в течении первого
полупериодаЗакон изменения частоты технически реализуемого сигнала представлен на рис 19,7 этот сигнал излучается передатчиком .Принимаемый сигнал запаздывает по отношению в излучаемому на время , равное времени распространения радиоизлучения до Земли и обратно :t3=2H/c . Поэтому закон изменения частоты принимаемого сигнала сдвинут относительно закона изменения частоты излучаемого сигнала на время t3.
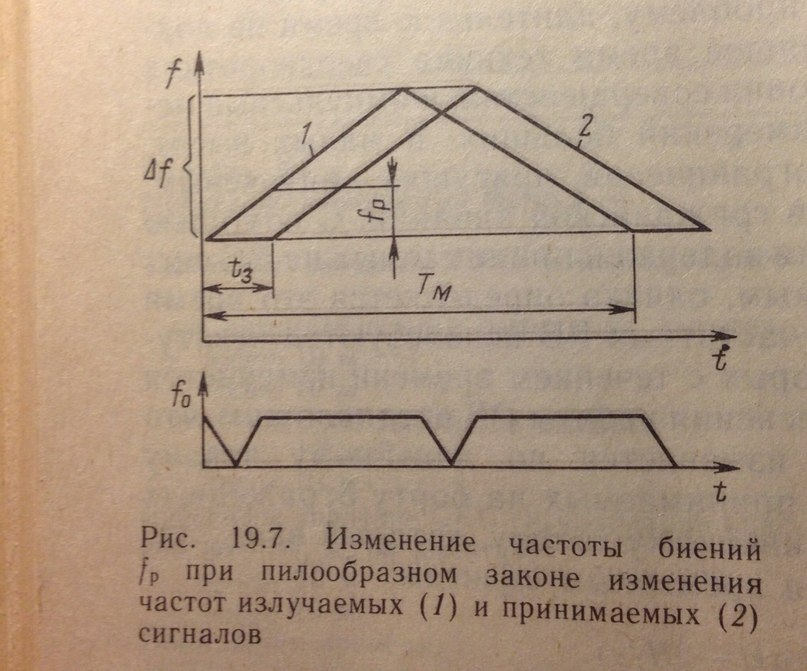
В результате мнгновенные значения частот излучаемых и принимаемых колебаний в любой фиксированный момент времени относящихся к большей части периода измения частоты ,различаются между собой на величину fр.
Fр=t3df/dt.
Такова идея работы частотного РВ. В РВ , используемых на практике применяется не линейный а гармонический закон закон изменения частоты.