

Привід із кроковим двигуном
Кроковий двигун - це електродвигун, ротор якого може повертатися тільки ступінчасто, тобто на строго певний кут. Якщо покрутити його вал вручну, то можна почути неголосні щиглики (або тріск при швидкому обертанні), які виникають щораз , коли ротор проходить чергове фіксоване положення.
К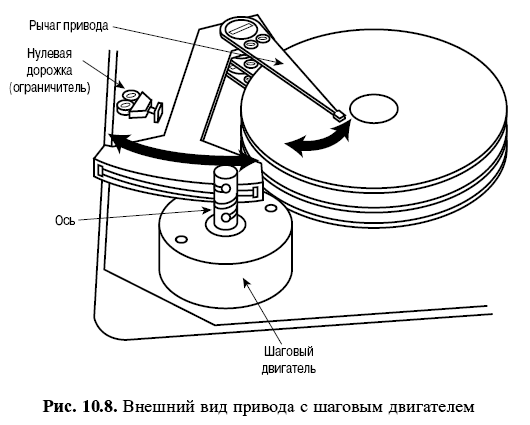 рокові
двигуни можуть установлюватися тільки
у фіксованих положеннях. Розміри цих
двигунів невеликі (порядку декількох
сантиметрів), а форма може бути різною
- прямокутною, циліндричною й т.д.
Кроковий двигун установлюється поза
блоком HDA, але його вал проходить усередину
через отвір з герметизуючою прокладкою.
Звичайно двигун розташовується в одному
з кутів корпуса накопичувача і його
можна легко побачити.
рокові
двигуни можуть установлюватися тільки
у фіксованих положеннях. Розміри цих
двигунів невеликі (порядку декількох
сантиметрів), а форма може бути різною
- прямокутною, циліндричною й т.д.
Кроковий двигун установлюється поза
блоком HDA, але його вал проходить усередину
через отвір з герметизуючою прокладкою.
Звичайно двигун розташовується в одному
з кутів корпуса накопичувача і його
можна легко побачити.
Одна із самих серйозних проблем, характерних для механізмів із кроковими двигунами, - нестабільність їхніх температур. При нагріванні й охолодженні диски розширюються й стискуються, у результаті чого доріжки зміщаються щодо своїх колишніх положень. Оскільки механізм приводу голівок не дозволяє зрушити їх на відстань, меншого одного кроку (перехід на одну доріжку), компенсувати ці погрішності температур неможливо. Голівки переміщаються відповідно до поданої на кроковий двигун кількістю імпульсів.
На мал. 10.8 показаний зовнішній вигляд приводу із кроковим двигуном.
Привід з рухливою котушкою
П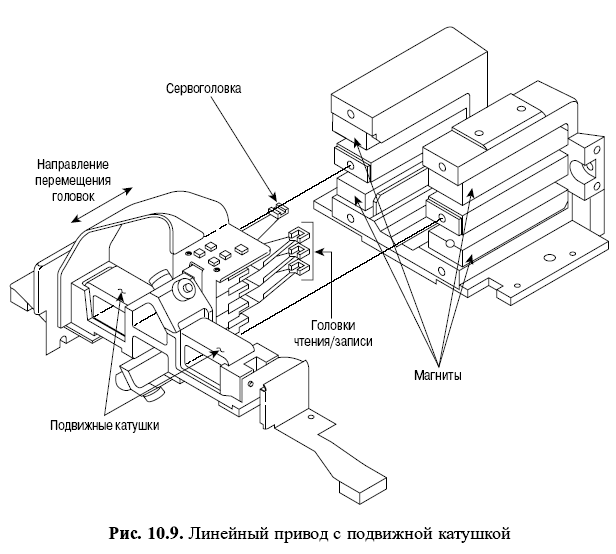 ривід
з рухливою котушкою використовується
практично у всіх сучасних накопичувачах.
На відміну від систем із кроковими
двигунами, у яких переміщення голівок
здійснюється наосліп, у приводі з
рухливою котушкою використовується
сигнал зворотного зв'язку, щоб можна
було точно визначити положення голівок
щодо доріжок і скорегувати їх якщо буде
потреба. Така система забезпечує більше
високу швидкодію, точність і надійність,
чим традиційний привід із кроковим
двигуном.
ривід
з рухливою котушкою використовується
практично у всіх сучасних накопичувачах.
На відміну від систем із кроковими
двигунами, у яких переміщення голівок
здійснюється наосліп, у приводі з
рухливою котушкою використовується
сигнал зворотного зв'язку, щоб можна
було точно визначити положення голівок
щодо доріжок і скорегувати їх якщо буде
потреба. Така система забезпечує більше
високу швидкодію, точність і надійність,
чим традиційний привід із кроковим
двигуном.
Привід з рухливою котушкою працює за принципом електромагнетизму. По конструкції він нагадує звичайний гучномовець. Як відомо, у гучномовці рухлива котушка, з'єднана з дифузором, може переміщатися в зазорі постійного магніту. При протіканні через котушку електричного струму вона зміщається разом з дифузором щодо постійного магніту. Якщо струм у котушці періодично змінюється (у відповідності зі звуковим електричним сигналом), то виникаючі при цьому коливання дифузора породжують сприйманий людиною звук. У типовій конструкції приводу рухлива котушка жорстко з'єднується із блоком голівок і поміщається в поле постійного магніту. Котушка й магніт ніяк не зв'язані між собою; переміщення котушки здійснюється тільки під впливом електромагнітних сил. З появою в котушці електричного струму вона так само, як й у гучномовці, зміщається відносно жорстко закріпленого постійного магніту, пересуваючи при цьому блок голівки. Подібний механізм виявляється досить швидкодіючим і не настільки шумним, як привід із кроковим двигуном.
На відміну від приводу із кроковим двигуном, у пристроях з рухливою котушкою немає заздалегідь зафіксованих положень. Замість цього в них використовується спеціальна система наведення (позиціювання), що точно підводить голівки до потрібного циліндра (тому привід з рухливою котушкою може плавно переміщати голівки в будь-які положення). Ця система називається сервоприводом і відрізняється від раніше розглянутої тим, що для точного наведення (позиціювання) голівок використовується сигнал зворотного зв'язку, що несе інформацію про реальне взаємне розташування доріжок і голівок. Цю систему часто називають системою зі зворотним зв'язком (або з автоматичним регулюванням) .
Коливання температур не позначаються на точності роботи приводу з рухливою котушкою й зворотним зв'язком. При стиску й розширенні дисків всі зміни їхніх розмірів відслідковуються сервоприводом, і положення голівок (не будучи визначеними) коректуються належним чином. Для пошуку конкретної доріжки використовується заздалегідь записана на диску допоміжна інформація (сервокод) і в процесі роботи завжди визначається реальне положення циліндра на диску з урахуванням всіх відхилень температур. Оскільки сервокод зчитується безупинно, у процесі нагрівання накопичувача й розширення дисків, наприклад, голівки відслідковують доріжку й проблем зі зчитуванням даних не виникає. Тому привід з рухливою котушкою й зворотним зв'язком часто називають системою спостереження за доріжками.
Механізми приводу голівок з рухливою котушкою бувають двох типів:
лінійний;
поворотний.
Ці типи відрізняються тільки фізичним розташуванням магнітів і котушок.