

Структурный анализ механизма
На рис.1.1, а представлена структурная схема исследуемого трехзвенного механизма с тремя подвижными звеньями.
Рис.1.1
Исследуем механизм на наличие пассивных связей, составив его матрицу смежности. Матрица смежности представлена в табл. 1.1.
Таблица 1.1
-
N
1
2
3
1
-
2
-
3
-
Число степеней свободы определяется по формуле Чебышева для плоских механизмов:
где n – количество подвижных звеньев, p1 и p2 – количество кинематических пар пятого и четвёртого класса соответственно.
Рис.1.2.
На рис.1.2 произведено структурное деление механизма
2. Кинематический анализ механизма
Кинематический анализ производится экспериментально-теоретически. Функцию положения ползуна 3 в зависимости от угла поворота кривошипа 1 получаем экспериментально. Результаты эксперимента представлены в таблице 2.1.
Таблица 2.1
S |
φ1̊ |
|
S |
φ1̊ |
|
S |
φ1̊ |
|
S |
φ1̊ |
|
10 |
|
100 |
|
190 |
|
280 |
|||
|
20 |
|
110 |
|
200 |
|
290 |
|||
|
30 |
|
120 |
|
210 |
|
300 |
|||
|
40 |
|
130 |
|
220 |
|
310 |
|||
|
50 |
|
140 |
|
230 |
|
320 |
|||
|
60 |
|
150 |
|
240 |
|
330 |
|||
|
70 |
|
160 |
|
250 |
|
340 |
|||
|
80 |
|
170 |
|
260 |
|
350 |
|||
|
90 |
|
180 |
|
270 |
|
360 |
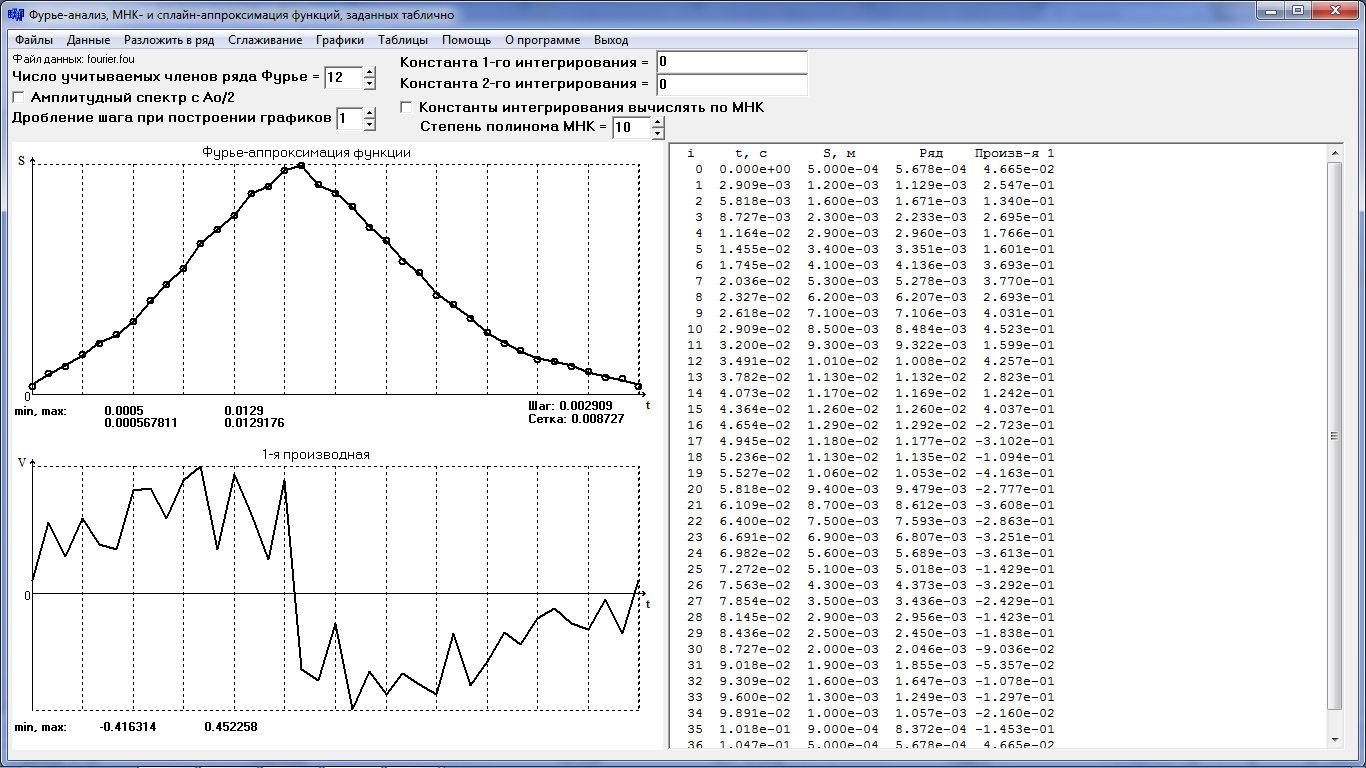
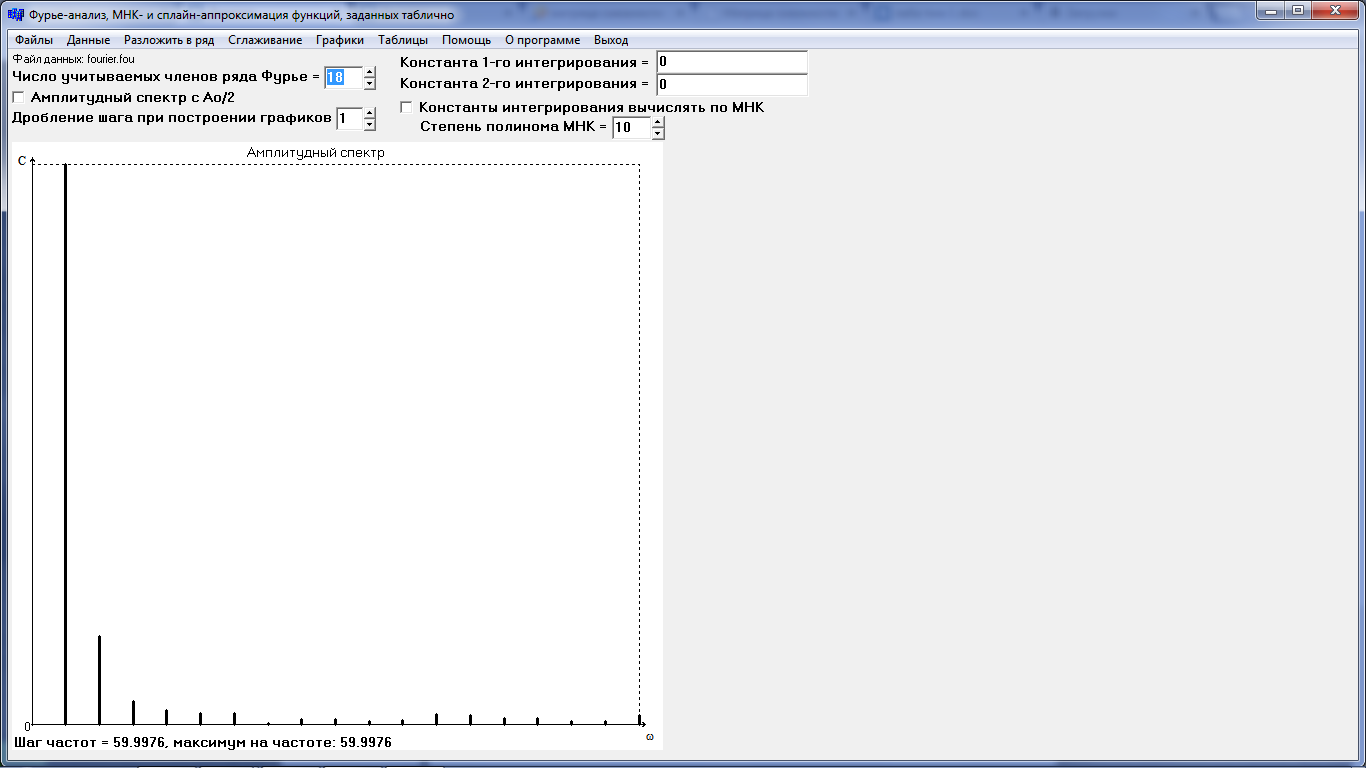
Полагая , что кривошип вращается с постоянной угловой скоростью ω1=60 с-1 , следовательно , φ1=ω1 t , получим функцию положения от времени S(t) . Для этого вычислим шаг таблицы по времени :
∆t=∆ φ1 рад / ω1 = 0.17453 / 60 = 0.002909 с ,
где ∆ φ1 рад =∆ φ1̊ π / 180 = 10π / 180 = 0.17453 рад .
Для аналитической обработки функции S(t) проведем аппроксимацию её таблицы четырьмя методами . Обработку данных эксперимента проведем с помощью программы ApproxFSP .