

1.6.2 Поперечная балансировка без крена со скольжением
Представим себе, что пилот устранил крен вертолета, для чего конус вращения НВ отклонил влево. При этом поперечная сила Zн уменьшится и исчезнет составляющая GSinγ. Тогда под действием неуравновешенной силы тяги PВ вертолет начнет смещаться влево -появляется левое скольжение (на режиме самовращения НВ вертолет получит правое
16
скольжение). Вследствие несимметричной обдувки фюзеляжа возникает боковая аэродинамическая сила Zф, направленная в сторону, противоположную скольжению. Равновесие сил и моментов устанавливается при некотором угле скольжения β (рис.8):
ΣFz=Zн+Zф-Трв=0;
ΣМх =Мхн+Мхr-Мхp-Мхф.
 Момент от фюзеляжа
Mхф
невелик и оказывает незначительное
влияние. Боковая аэродинамическая сила
фюзеляжа Zф
при постоянном угле скольжения растет
Момент от фюзеляжа
Mхф
невелик и оказывает незначительное
влияние. Боковая аэродинамическая сила
фюзеляжа Zф
при постоянном угле скольжения растет
Рис. 8 Балансировка вертолета без крена со скольжением.
пропорционально
квадрату скорости:
Zф=Сzф![]() .
Поэтому
для сохранения равновесия угол скольжения
необходимо уменьшать, воздействуя на
педали управления (рис.9).
.
Поэтому
для сохранения равновесия угол скольжения
необходимо уменьшать, воздействуя на
педали управления (рис.9).
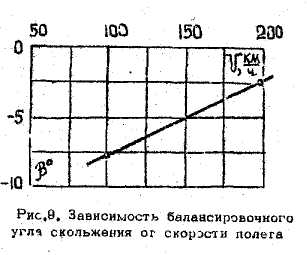 Рис.9
Зависимость балансировочного угла
скольжения
Рис.9
Зависимость балансировочного угла
скольжения
от скорости полета
17
1.6.3 Балансировочные кривые вертолета Ми-8 поперечной балансировки
Поперечная балансировка вертолета осуществляется путем боковых отклонений кольца АП и РУ. На каждом режиме полета вертолет балансируется при вполне определенном положении кольца автомата перекоса и РУ (см.рис.10).
Ход балансировочных кривых показывает, что с ростом скорости кольцо АП должно занимать более левое положение, так как угол естественного завала конуса НВ вправо увеличивается, и вертолет стремится к смещению и крену вправо. Для сохранения поперечного равновесия необходимо постепенно отклонять РЦШ влево. И наоборот, по мере уменьшения скорости кольцо АП и РЦШ должны занимать более правое положение. На режиме висения РЦШ должна занимать крайнее правое положение.
Изменение режима работы силовой установки при постоянной скорости также влияет на балансировочное отклонение кольца автомата перекоса. Так, при повышенном режиме работы двигателей требуется дополнительное отклонение вправо кольца автомата перекоса и РЦЩ. Это вызвано тем, что пилот с целью парирования возросшего реактивного момента НВ увеличивает тягу РВ.
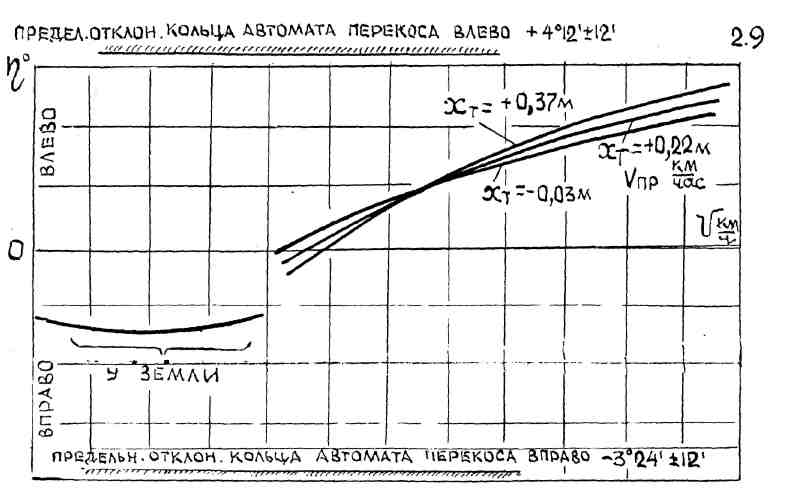
Рис10 Балансировочные кривые поперечных отклонений кольца АП
От скорости по прибору
18
Изменение продольной центровки практически не сказывается на условиях поперечной балансировки. Сравнивая балансировочные отклонения РЦШ и кольца АП с их предельными значениями, можно определить запасы поперечного управления вертолета.
Из анализа кривых (см.рис.10) видно, что минимальные запасы по отклонению РЦШ влево получаются в полете на максимальной скорости и на режиме самовращения НВ, а минимальные запасы по отклонению РЦШ вправо - на режиме висения при максимальной мощности двигателей.
Выводы:
1. На вертолет Ми-8 в полете действует совокупность сил и моментов в поперечной плоскости.
2. Для сохранения условий равновесия вертолет Ми-8 балансируется либо с креном без скольжения, либо без крена, но со скольжением. Численные значения крена и скольжения невелики и зависят от скорости полете. На режиме висения вертолет балансируется только при правом крене.
3. Поперечная балансировка осуществляется путем боковых отклонений РЦШ. Балансировочное положение РЦШ зависит от скорости полета и режима работы силовой установки, определяется с помощью балансировочных кривых.
4. Анализ балансировочных кривых вертолета Ми-8 показывает, что при соблюдении установленных ограничений вертолет балансируется с достаточными запасами поперечного управления.