

Контрольные вопросы:
1. Какие продольные моменты действуют на вертолет относительно
оси Oz?
2. Как осуществляется продольная балансировка на данном режиме полета ?
3. Как изменится продольное равновесие вертолета, если:
- увеличить шаг НВ ?
- отклонить правую педаль ? левую педаль ?
- увеличить скорость ? уменьшить скорость ?
- сместить центр масс вперед ? назад ?
4. Какую зависимость показывает балансировочная кривая ?
5. В какую сторону отклоняется кольцо автомата перекоса:
- при увеличении скорости ?. - при уменьшении частоты вращения НВ ?
- при смещения центра массы назад ?- при попутном ветре ?- при уменьшении массы вертолета?
- при увеличении высоты полета ?
6. Как влияет на угол тангажа:- скорость полета ?- ветер ?
1.6 Поперечная балансировка
Целью поперечной балансировки является сохранение равновесия сил и моментов, действующих в поперечной плоскости, перпендикулярной продольной оси 0х вертолета. Возможны два способа поперечной балансировки: с креном без скольжения и без крена со скольжением. В обоих случаях движение вертолета прямолинейное и равномерное, с постоянным курсовым углом. При балансировке с креном без скольжения курсовой угол равен нулю.
1.6.1 Поперечная балансировка с креном.
На вертолете Ми-8 в поперечной плоскости действуют следующие силы и моменты:
- сила тяги рулевого венте Тpв. На моторных режимах направлена влево по полету, на режиме самовращения НВ - вправо;
- поперечная сила несущего винта Zн. Представляет собой проекцию силы Rн на поперечную ось 0z. Направлена вправо на моторных режимах и влево - на режиме самовращения НВ. Возникает вследствие бокового завала конуса вращения НВ, вызванного поступательнвм движением вертолета и поперечными отклонениями РЦШ;
- поперечная сила фюзеляжа Zф. Появляется при наличии скольжения вертолета в случае
14
балансировки без крена;
- кренящий момент oт несущего винта Мхн. Возникает под действием поперечной силы Zн на плече yн относительно продольной оси 0х. Момент Мхн стремится накренить вертолет вправо на моторных режимах и влево - на режиме самовращения НВ;
- инерционный момент за счет разноса ГШ Мхr. Направлен в сторону бокового завала конуса вращения НВ;
- кренящий момент от тяги рулевого винта Мхр. Действует на плече hрв относительно оси 0х, стремится накренить вертолет влево на моторных режимах и вправо - на режиме самовращения НВ.
Вертолет находится в состоянии поперечного равновесия, если алгебраические суммы поперечных сил и их моментов относительно продольной оси 0x равны нулю. При этом возможны два способа поперечной балансировки вертолета: без скольжения и со скольжением.
 Для того, чтобы
выполнить полет без скольжения, должны
быть уравновешены силы тяги РВ и
поперечная сила НВ Zн.
В
противном случае под действием силы
Трв
вертолет
начнет смещаться влево и
появится
левое скольжение. Для устранения
скольжения необходимо наклонить конус
вращения НВ вправо для увеличения
боковой силы Zн,
уравновешивающей
Для того, чтобы
выполнить полет без скольжения, должны
быть уравновешены силы тяги РВ и
поперечная сила НВ Zн.
В
противном случае под действием силы
Трв
вертолет
начнет смещаться влево и
появится
левое скольжение. Для устранения
скольжения необходимо наклонить конус
вращения НВ вправо для увеличения
боковой силы Zн,
уравновешивающей
Рис.6 Поперечная балансировка с креном без скольжения
силу Тpb. При этом появляется кренящий момент Мхн (рис.6). Обычно плечо Ун больше плеча hрв, поэтому при равенстве сил вертолет накреняется вправо. При наклоне конуса вправо
15
появляется инерционный момент на втулке за счет разноса ГШ Мхr, также действующий вправо. Крен вызывает появление составляющей силы тяжести GSinγ. Кренящие моменты будут сбалансированы, если Трв >Zн.
Условие поперечной балансировки с креном без скольжения имеет вид:
ΣFz = Zн+G Sinγ-Трв =0
ΣMx= Zн·yн+Mxг -Трв·hрв=0
На режиме самовращения НВ тяга РВ направлена вправо по полету. Для устранения правого скольжения необходимо конус вращения НВ отклонить влево, вертолет будет сбалансирован с некоторым левым креном.
Величина балансировочного крена вертолета зависит от тяги РВ на данном режиме полета, т.е. от потребной мощности НВ Nпотр.
Из графической зависимости угла крена вертолета Ми-8 от скорости полета при постоянной
м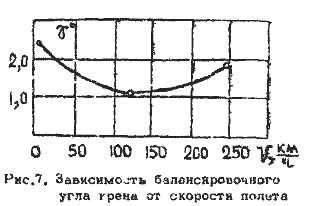 ощности
двигателей (рис.7) следует, что на режиме
висения при максимальной
ощности
двигателей (рис.7) следует, что на режиме
висения при максимальной
Рис.7 Зависимость балансировочного угла крена
от скорости полета
потребной мощности Nпотр крен вертолета вправо также наибольший. В полете с поступательной скоростью крен вертолета меньше, а на экономической скорости Vэк-минимальный.