

I.4 Условия равновесия
Согласно
второму закону механики вертолет, как
любое твердое тело, движется прямолинейно
и равномерно и равнодействующая всех
действующих нa
него внешних сил равна нулю. Следовательно,
необходимым условием установившегося
полета вертолета является равновесие
внешних сил:
![]() =
0,
где Fi-
вектор
какой-либо силы.
=
0,
где Fi-
вектор
какой-либо силы.
Однако внешние силы, за исключением силы тяжести, как правило, не проходят через центр масс. Следовательно, они создают моменты относительно центра масс, стремящиеся развернуть вертолет в пространстве.
Аэродинамические силы и их направление зависят от ориентации вертолета относительно направления движения. Следовательно, при неизменной скорости набегающего потока
8
равновесие
сил сохраняется лишь в том случае,
если вертолет не поворачивается
относительно воздушного потока. Для
этого к условию равновесия сил необходимо
добавить уравнение равновесия моментов:
![]() ,
где
Mi–
вектор момента силы Fi
относительно
центра масс.
,
где
Mi–
вектор момента силы Fi
относительно
центра масс.
Выводы:
1. Условием полного равновесия вертолета является равенство нулю алгебраической суммы внешних сил и их моментов относительно центра масс.
2. Полного равновесия пилот добивается путем балансировки вертолета, в процессе которой изменяется тяга несущего и рулевого винтов.
Балансировка вертолета рассматривается относительно осей Ох, Оу , Oz и соответственно подразделяется на продольную, поперечную и путевую. Поперечная и путевая балансировки объединяются общим понятием боковая балансировка.
Контрольные вопросы:
1. Что понимается под балансировкой вертолета ?
2. Что такое связанная система координат ?
3. Какие углы характеризуют пространственное положение вертолета?
4. Как действуют моменты относительно осей Ох,Оу,Oz ?
5. Что понимается под центровкой вертолета ? Почему установлены ограничения по передней и задней центровкам ?
6. Какое влияние на поведение вертолета оказывает вертикальная и поперечная центровки ?
7. Назовите причины изменения центровки на вертолете. Как рассчитывается и проверяется центровка перед полетом ?
8. Сформулируйте условия полного равновесия вертолета.
1.5 Продольная балансировка
Целью продольной балансировки является выдерживание пилотом заданного угла тангажа и поступательной скорости вертолета. Вертолет считается сбалансированным, если он находится в состоянии равновесия под действием сил и моментов, действующих в продольной плоскости, перпендикулярной поперечной оси Oz .
На вертолет Ми-8 в полете действуют следующие продольные моменты (рис.3):
- момент несущего винта Мzн = Rн·ХТ эф.
ХТэф-эффективная центровка вертолета, представляющая собой расстояние между вектором полной аэродинамической силы НВ Rн и центром масс вертолета;
- инерционный момент на втулке за счет разноса горизонтальных шарниров (ГШ) Mzr.
9
С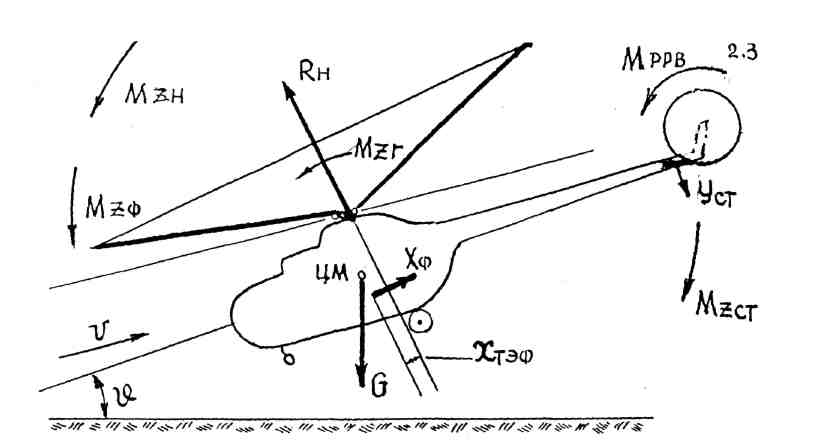 уммарный
момент от НВ и разноса ГШ является
пикирующим на моторном режиме полета
и кабрирующим на режиме самовращения
НВ. Он зависит от центровки и балансировочного
наклона конуса вращения НВ;
уммарный
момент от НВ и разноса ГШ является
пикирующим на моторном режиме полета
и кабрирующим на режиме самовращения
НВ. Он зависит от центровки и балансировочного
наклона конуса вращения НВ;
Рис. 3. Продольная балансировка вертолета.
- момент рулевого винта Mzр. Представляет собой реактивный момент РВ. Является кабрирующим на всех режимах полета и зависит oт углов установки лопастей РВ;
- момент фюзеляжа Mzф. Возникает за счет обдувки фюзеляжа встречным и индуктивным потоками. Суммарный момент фюзеляжа является кабрирующим на малых скоростях полета и при самовращении НВ, а на режимах моторного полета – пикирующим;
- момент стабилизатора MzсТ. На режимах полета с работающими двигателями является кабрирующим, так как при отрицательном угле установки подъемная сила стабилизатора УсТ направлена вниз. На режиме самовращения НВ момент MzсТ является пикирующим.
Условием продольного равновесия вертолета является равенство нулю алгебраической суммы продольных моментов, действующих относительно поперечной оси 0z:
![]() =
-Mzн
– Mzr
=
-Mzн
– Mzr
![]() Mzф
Mzст
+ Mzр
=0.
(I)
Mzф
Mzст
+ Mzр
=0.
(I)
Из уравнения (I) следует, что вертолет находится в состоянии продольного равновесия при определенном значении момента от несущего винта Mzн. При изменении моментов Mzн и Mzr равновесие нарушается, и вертолет переходит на новый режим полета. Следовательно, для балансировки вертолета пилот должен с помощью РУ изменить
наклон конуcа вращения НB. При этом изменяется направление полной аэродинамической силы НВ Rн, эффективная центровка ХТэф, а значит и продольный момент от НВ.
В установившемся полете пилот стремится выдержать прямолинейное и равномерное движение вертолета, для чего РУ удерживается в балансировочном положении и незначительно отклоняется лишь для парирования возмущений.
10
![]() Отклонение
конуса вращения НВ кинематически связано
с органами управления - кольцом автомата
перекоса и РУ и зависит от следующих
факторов: скорости полета, центровки,
режима работы двигателей.
Отклонение
конуса вращения НВ кинематически связано
с органами управления - кольцом автомата
перекоса и РУ и зависит от следующих
факторов: скорости полета, центровки,
режима работы двигателей.