

4.2 Метод перевозимых квантовых часов
Метод перевозимых квантовых часов (ПКЧ ) или метод транспортируемого квантового генератора (ТКГ) является одним из наиболее важных в метрологической практике. ПКЧ - это по сути малогабаритная транспортируемая мера частоты и времени (или эталон сравнения), которая перед транспортировкой и после нее сравнивается со стационарными синхронизируемыми стандартами или эталонами времени и частоты [5, 14].
Во время транспортировки и при работе на объекте ПКЧ хранят с определенной точностью единицы времени и частоты и шкалу времени, переданные им в синхронизируемых пунктах.
Метод ПКЧ позволяет, в отличие от большинства других методов, производить прямые измерения, а не косвенные. Точность синхронизации данным методом в основном определяется характеристиками перевозимых часов – квантового стандарта времени и частоты.
Вначале, в качестве ПКЧ использовались рубидиевые (типа HP-5065А, СЧВ-74, СЧВ-74) или цезиевые (типа HP-5061А) стандарты времени и частоты. Они обеспечивали погрешность измерений сдвига шкал не более 1 мкс (для рубидиевых ПКЧ) и 0,1 мкс (для цезиевых ПКЧ) для случая времени транспортировки в течение нескольких суток.
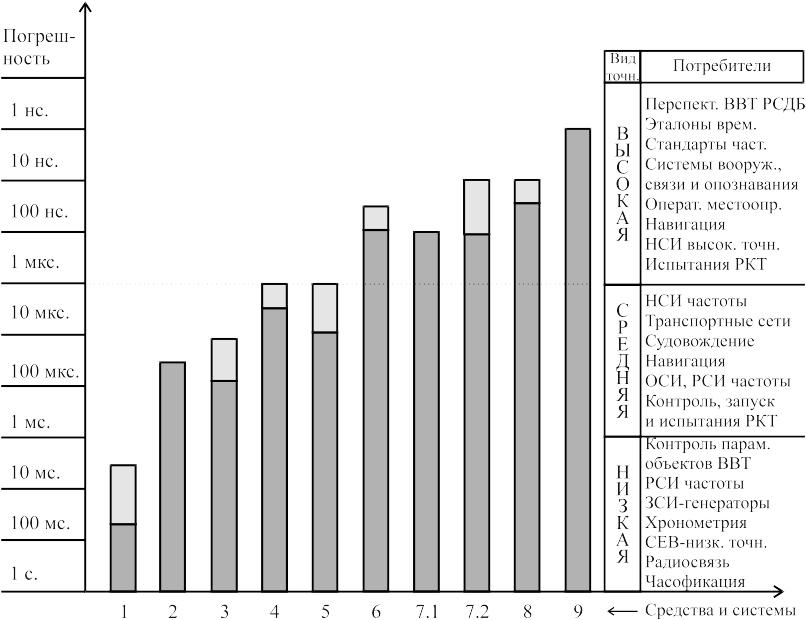

1 — Звуковое радиовещание; 2. — ДВ радиостанции; 3. — ИСЗ (низкоорбит.);
4. — Радионавигационные системы ДВ (“Чайка”, “Лоран‑С”); 5. — ТВ; 6. — ПКЧ (НР‑50601А, Ч1‑76, 17н646); 7. — Среднеорбитальные спутниковые навигационные системы ГЛОНАСС и GPS (7.1 — непосредственные измерения, 7.2 — дифференциальный режим); 8. — Радиометеорный метод (МЕТКА, КАМА, 17н91, 17н830) и связные ИСЗ; 9. — Лазерные и волоконно-оптичесие линии.
Рисунок 10 – Современные средства и методы синхронизации:
В настоящее время в качестве ПКЧ используются пассивные водородные стандарты времени и частоты типа Ч1-76 и малогабаритный водородный стандарт активного типа с сапфировым резонатором. Современные водородные ПКЧ обеспечивают наносекундную погрешность измерений. Для сокращения времени транспортировки используется самолет и вариант беспосадочного сравнения (“летающие ПКЧ”).
Организационно метод ПКЧ достаточно сложен, а экономически весьма дорог и поэтому используется сравнительно редко, главным образом, в метрологии, для контроля результатов измерений другими методами.
4.2 Непосредственный и дифференциальный методы приема сигналов спутниковых радионавигационных систем.
В настоящее время использование сигналов спутниковых навигационных систем GPS и ГЛОНАСС является одним из наиболее высокоточных способов синхронизации часов в глобальном масштабе.
Различные аспекты синхронизации часов по сигналам GPS и ГЛОНАСС достаточно широко и подробно рассмотрены в литературе, например, в [47–53].
Существует четыре основных метода синхронизации часов по сигналам спутниковых навигационных систем: непосредственной синхронизации, взаимной синхронизации, пролетных часов и радиоинтерферометрии на короткой базе [47]. Наибольшее распространение среди них получили два первых метода, принципы которых иллюстрируются на рис. 1
Метод непосредственной синхронизации часов является наиболее простым. Он обеспечивает глобальную зону и не требует привлечения дополнительной информации, кроме передаваемой в составе навигационных сигналов. Расхождение часов потребителя относительно ШВС или UTC (SU) определяется в соответствии с выражением
![]()
где S – измеренное значение так называемой “псевдодальности”, рассчитанной по сдвигу между принятым сигналом НКА и опорным сигналом приемника потребителя; D – дальность от НКА до потребителя; с – скорость света; ион, троп – поправки, учитывающие влияние ионосферы и тропосферы на распространение сигнала НКА; ап –задержка сигнала в приемнике; ТНКА – расхождение шкалы времени НКА относительно ШВС; ТШВС – расхождение ШВС относительно UTC (SU).

Дальность от НКА до потребителя рассчитывается на основе известных координат потребителя (хп, yп, zп) и эфемерид НКА (хi, yi, zi), передаваемых в составе навигационного сигнала.
Расхождение шкалы времени НКА относительно ШВС рассчитывается на основе частотро-временных поправок ЧВП (i, i). Значение расхождения ШВС относительно UTC (SU) передается в составе навигационного сигнала непосредственно в виде поправки к ШВС t(c).
Так как в системе ГЛОНАСС в составе навигационных сигналов НКА не передаются параметры модели ионосферы для учета ее влияния на распространение сигнала, ионосферная поправка рассчитывается потребителем на основе параметров, хранимых автономно в приемнике. Аналогично рассчитывается тропосферная поправка. Задержка сигнала в приемнике определяется путем его периодической калибровки. Из выражения (1) следует, что точность синхронизации часов при использовании метода непосредственной синхронизации определяется следующими составляющими:
погрешностью измерения “псевдодальности”;
нестабильностью задержки сигнала в приемнике;
погрешностью учета ионосферной и тропосферной задержек;
погрешностью знания координат антенны приемника;
погрешностью эфемерид НКА;
погрешностью ЧВП;
погрешностью поправки к ШВС.
Поскольку первые четыре из перечисленных составляющих погрешностей обусловлены характеристиками приемника, а три последние – характеристиками системы, точность синхронизации в режиме непосредственной синхронизации не может быть получена лучше десятков наносекунд.
Метод взаимной синхронизации предполагает проведение одновременных измерений в пунктах А, В размещение часов по сигналам одного из НКА и последующий обмен результатами измерений. В этом случае взаимное расхождение шкал времени часов определяется в соответствии с выражением
ТАВ=ТА-ТВ
где ТА, ТВ – результаты определения расхождения каждых часов относительно ШВС или UTC (SU) в соответствии с (1).
Очевидно, что за счет исключения ряда составляющих, обусловленных характеристиками системы и являющихся общими для часов А и В, точность их взаимной синхронизации повышается. В связи с этим важное значение приобретают характеристики приемников, определяющие потенциальную точность синхронизации часов.
Результаты проведенных в РИРВ и ВНИИФТРИ экспериментов [47, 48] показали, что уже в настоящее время система ГЛОНАСС обеспечивает точность синхронизации часов на уровне 10-20 нс (не хуже 20 нс за сутки в режиме непосредственной синхронизации и не хуже 10 нс в режиме взаимной синхронизации).