

6.3. Выполнение работы
6.3.1. Описание модели
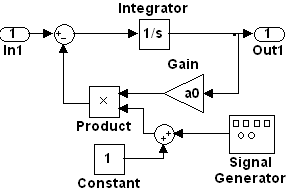
S-модель исследуемой адаптивной системы представлена на рис. 6.3.
Рис. 6.3. S-модель адаптивной системы регулирования нестационарным объектом первого порядка |

Положение полюса нестационарного объекта задается соотношением:
![]() ,
(6.6)
,
(6.6)
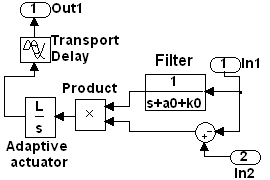
где A – амплитуда изменения, а f(t) – случайная функция, значения которой равномерно распределены в интервале [-1, 1]. Нестационарный объект описывается S-моделью, представленной на рис. 6.4а. Структура блока адаптера отличается от схемы, представленной на рис. 6.2, включением в него звена идеального транспортного запаздывания. S-модель его представлена на рис. 6.4б.
а |
б |
Рис. 6.4. Внутренняя структура блоков-подсистем S-модели. а – нестационарный объект (Nonstationar plant), б – адаптер (Adaptive Controller) |
|
Блок Numerical comparator (численного сравнения) предназначен для вычисления параметра адаптивности L, который выражает качество настройки исполнительного механизма и рассчитывается по следующему соотношению:
 .
(6.10)
.
(6.10)
Он
характеризует то, насколько в среднем
(за время процесса) выходная характеристика
нестационарного объекта
![]() ,
снабженного адаптивным регулятором
ближе к выходной характеристике эталонной
модели
,
снабженного адаптивным регулятором
ближе к выходной характеристике эталонной
модели
![]() ,
сравнительно с выходной характеристикой
нестационарного объекта
,
сравнительно с выходной характеристикой
нестационарного объекта
![]() ,
снабженного обычным регулятором.
Очевидно, что L
должен быть больше единицы и, чем эта
величина выше, тем лучше функционирует
контур адаптации системы. Настройка
адаптивного регулятора, осуществляется
выбором коэффициента передачи
исполнительного механизма λ и должна
соответствовать максимуму параметра
L.
Для оперативного расчета этой величины
используется блок Numerical
comparator
выходной сигнал которого который
индицируется в окне блока Display.
Остальные блоки модели не требуют
специальных пояснений.
,
снабженного обычным регулятором.
Очевидно, что L
должен быть больше единицы и, чем эта
величина выше, тем лучше функционирует
контур адаптации системы. Настройка
адаптивного регулятора, осуществляется
выбором коэффициента передачи
исполнительного механизма λ и должна
соответствовать максимуму параметра
L.
Для оперативного расчета этой величины
используется блок Numerical
comparator
выходной сигнал которого который
индицируется в окне блока Display.
Остальные блоки модели не требуют
специальных пояснений.
6.3.2. Предварительная настройка схемы
Перед началом работы следует установить в открываемых окнах свойств блоков схемы те значения параметров, которые заданы в таблице 6.1 индивидуальных заданий. К ним относятся параметры изменения задающего сигнала g(t) – характер изменения его во времени (waveform), амплитуда изменения (gmax) и частота (ω, рад/c), величина запаздывания τ в канале управления, характеристики эталонной модели (a0, k0) и амплитуда случайного изменения положения полюса нестационарного объекта – A.
6.3.3. Выполнение моделирования и анализ
В
процессе работы необходимо изменять
коэффициент передачи исполнительного
устройства адаптивного регулятора λ
(окно свойств блока Adapter)
с целью нахождения значения, отвечающего
максимуму степени адаптивности L.
При этом всякий раз следует при заданном
значении λ отмечать значение величины
L
для построения
в дальнейшем графика функции L(λ).
То же следует повторить, увеличив вдвое
время запаздывания τ в канале управления.
Для найденных оптимальных настроек
следует построить графики процессов
изменения желаемой величины (выхода
эталонной модели)
![]() ,
выхода нестационарного объекта
,
снабженного адаптивным регулятором, и
такого же объекта, снабженного обычным
регулятором
,
выхода нестационарного объекта
,
снабженного адаптивным регулятором, и
такого же объекта, снабженного обычным
регулятором
![]() .
.