

5.3. Выполнение работы
5.3.1. Описание модели
S-модель оптимальной по быстродействию системы должна соответствовать структурной схеме, приведенной на рис. 5.1.
Рис. 5.4. S-модель исследования оптимальной по быстродействию системы второго порядка |
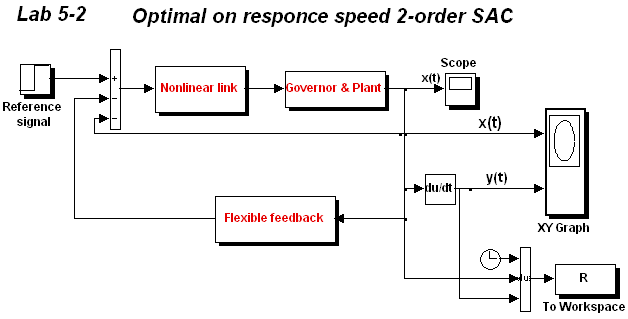
Она представлена на рис. 5.4. В модель входит блок вычислительного устройства ВУ (Flexible feedback), блок нелинейного элемента (Nonlinear link) и линейной управляемой части системы (Governor&Plant). Процессы в следящей системе исследуются при возбуждении источником ступенчатого воздействия, визуализация процессов производится с помощью блока Scope, а результаты сохраняются в память(с последующим построением и анализом совокупности графиков в среде Matlab) при помощи блока XY Graph8.
Рис. 5.5. S-модель ВУ нелинейной ГОС системы второго порядка оптимальной по быстродействию |
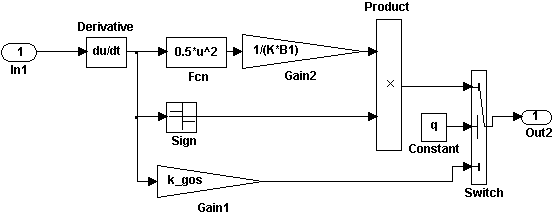
Модель, реализующая схему ВУ, которая вычисляет величину выхода в соответствии с уравнением (5.4), представлена на рис. 5.5 (внутренняя структура маскированной подсистемы основной системы). Коэффициент B1 уровня релейного выхода отвечает значению umax. Сигнал с выхода этого устройства суммируется с сигналом ошибки ε, формируемом на сумматоре и поступает на вход реле.
В устройстве дополнительно предусмотрено переключение с нелинейного преобразователя на линейный коэффициент передачи при моделировании квазиоптимальных систем, что осуществляется выбором знака вспомогательного параметра q: при q>0 подключается нелинейный преобразователь, а при q<0 – линейный.
В исследуемой системе предусмотрен выбор вида статической характеристики нелинейного элемента, подключенного к выходу ВУ, – идеальное двухпозиционное реле, двухпозиционное реле с гистерезисом и звено насыщения. Выбор характеристики осуществляется заданием соответствующего значения вспомогательной переменной q в диалоговом окне свойств блока Nonlinear link.
Управляемая линейная часть состоит из включенных последовательно двух интеграторов, линейного усилителя с коэффициентом передачи K и звена идеального транспортного запаздывания. Начальные условия, заданные для блоков интеграторов определяют начальное состояние системы (x0, y0).
5.3.2. Настройка модели, выполнение моделирования и анализ
Перед началом работы следует выбрать, в соответствии с номером задания (номером курсанта в академическом журнале), параметры линейной управляемой части и релейного элемента из таблицы индивидуальных заданий 5.4. Установить эти значения в окнах всех соответствующих блоков модели, при этом время транспортного запаздывания τ и ширину зоны неоднозначности реле следует вначале выбрать равными нулю.
Выполните моделирование и постройте графики переходных процессов и фазовых траекторий ИТ системы для заданных начальных условий и, для начальных условий знак которых изменен на противоположный (по 2 кривых на одном графике). Указать на графиках моменты времени (точки) переключения.
Введите ненулевое транспортное запаздывание (заданное значение τ) в линейную часть − для четных значений n, или петлевую неоднозначность статической характеристики реле (заданное значение е) − для нечетных значений n. Проведите расчет и постройте графики для двух случаев (по 2 кривые на одном графике):
– в гибкую обратную связь включено вышеописанное нелинейное звено ВУ;
– в гибкую обратную связь включено квазиоптимальное линейное звено (коэффициент kgos, соответствующий условию квазиоптимальности, подобрать самостоятельно, при этом в процессе подбора заполните таблицу 5.1);
Табл. 5.1. Характеристики переходного процесса в квазиоптимальной по быстродействию системе с транспортным запаздыванием и идеальным релейным элементом в цепи управления..
№ п/п |
Величина kgos |
Длительность процесса tп |
Динамический заброс σ |
1 |
kgos=0 (включено нелинейное ВУ) |
|
|
2 |
|
|
|
… |
|
|
|
− убедитесь, что найденное значение не обеспечивает оптимальности процесса при других начальных условиях (изменив знак начальных условий, вновь произведите моделирование);
– исследуйте возможность гашения (полного и частичного) автоколебаний в квазиоптимальной системе. Для этого замените идеальный релейный элемент звеном насыщения и, варьируя полуширину b пропорциональной части, добейтесь оптимального по быстродействию процесса. В процессе подбора заполните таблицу 5.2.
Табл. 5.2. Характеристики переходного процесса в квазиоптимальной по быстродействию системе с транспортным запаздыванием и звеном насыщения в цепи управления.
№ п/п |
Величина полуширины пропорциональной зоны b |
Длительность процесса tп |
Амплитуда автоколебаний Aa |
1 |
|
|
|
2 |
|
|
|
… |
|
|
|
В отчет должны входить:
структурная схема системы;
заполненные таблицы 5.1 – 5.2;
построенные графики переходных процессов и фазовых траекторий (с указанием точек переключения на фазовой плоскости и моментов времени переключения реле на кривых переходных процессов) для идеального случая и для квазиоптимальной системы с настройками зафиксированными в табл. 5.1 и 5.2;
выводы по влиянию характеристик управляемой части и параметров управляющего устройства на протекание переходного процесса.
письменный ответ на вопросы, указанные преподавателем.