

4.3. Выполнение работы
4.3.1. Описание модели
Очевидно, что при моделировании процессов в линейной импульсной системе ее S-модель должна соответствовать структурной схеме системы изображенной на рис. 4.2. Такая S-модель представлена на рис. 4.3.
Рис. 4.3. S-модель линейной импульсной системы |
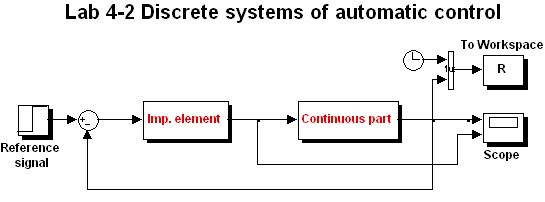
В состав замкнутой системы входят импульсный элемент (Imp. element) и непрерывная часть (Continuous part).
S-модель импульсного элемента, предназначенного для выработки прямоугольных импульсов с заданными значениями длительности γ и времени квантования T, представлена на рис. 4.4. Диаграммы, поясняющие работу импульсного элемента, представлены на рис. 4.5. Буквами A, B, C, D на этих рисунках обозначены зависимости генерируемого сигнала от времени для различных узлов импульсного элемента.
Основным
составляющим импульсного элемента
является генератор периодических
сигналов, который вырабатывает
пилообразный сигнал с периодом повторения
![]() и амплитудой равной 0,5 (А). Этот сигнал
суммируется с постоянным сигналом
величиной (γ-0,5). Это позволяет менять
часть пилообразного сигнала, который
расположен над осью абсцисс (В). Следующий
за сумматором релейный элемент
вырабатывает прямоугольные импульсы,
высота которых равна единице, а
длительность
и амплитудой равной 0,5 (А). Этот сигнал
суммируется с постоянным сигналом
величиной (γ-0,5). Это позволяет менять
часть пилообразного сигнала, который
расположен над осью абсцисс (В). Следующий
за сумматором релейный элемент
вырабатывает прямоугольные импульсы,
высота которых равна единице, а
длительность
![]() определяется величиной и знаком сигнала,
поступающего с выхода сумматора (С).
Непрерывный сигнал ошибки ε(t)
преобразуется в ступенчатый сигнал в
звене ZOH
(Zero
Order
Hold
– экстраполятор нулевого порядка) с
тем же периодом квантования, каков
период повторения пилообразного сигнала.
Он, в свою очередь, после перемножения
на единичные импульсы, формирует импульсы
высотой равной величине сигнала ε, а
длительностью γТ
(D).
Здесь же пунктирной линией приведен
график непрерывного сигнала ошибки
ε(t),
являющегося входным для импульсного
элемента.
определяется величиной и знаком сигнала,
поступающего с выхода сумматора (С).
Непрерывный сигнал ошибки ε(t)
преобразуется в ступенчатый сигнал в
звене ZOH
(Zero
Order
Hold
– экстраполятор нулевого порядка) с
тем же периодом квантования, каков
период повторения пилообразного сигнала.
Он, в свою очередь, после перемножения
на единичные импульсы, формирует импульсы
высотой равной величине сигнала ε, а
длительностью γТ
(D).
Здесь же пунктирной линией приведен
график непрерывного сигнала ошибки
ε(t),
являющегося входным для импульсного
элемента.
Рис. 4.4. S-модель импульсного элемента |
Рис. 4.5. Диаграммы, поясняющие работу импульсного элемента |
Диалоговое окно блока позволяет задать параметры γ и Т.
Передаточная функция блока НЧС (Continuous part) записывается в виде:
 .
(4.13)
.
(4.13)
Диалоговое окно блока позволяет задать численные значения параметров, реализуя НЧС в виде идеально интегрирующего звена или в виде апериодического звена 1 порядка.
В схеме предусмотрена визуализация результатов расчета с помощью осциллографа (scope) и запись их в память (To Work space) для последующего построения графиков процессов и их анализа.
4.3.2. Настройка модели, выполнение моделирования и анализ
Выполнение работы состоит из двух частей. В первой части исследуются устойчивость импульсных систем и процессы конечной длительности в них.
Курсант,
в соответствии со своим номером в
академическом журнале, должен выбрать
из таблицы 4.3 значения параметров
передаточной функции непрерывной части
системы
![]() и параметры импульсного элемента.
Вначале НЧС представляется идеальным
интегрирующим звеном, а потом расчеты
и моделирование повторяются для
апериодического звена 1 порядка. Один
из параметров этих звеньев остается
незаданным (в соответствующей клеточке
таблицы стоит знак вопроса). Его необходимо
вычислить так, чтобы замкнутая дискретная
система:
и параметры импульсного элемента.
Вначале НЧС представляется идеальным
интегрирующим звеном, а потом расчеты
и моделирование повторяются для
апериодического звена 1 порядка. Один
из параметров этих звеньев остается
незаданным (в соответствующей клеточке
таблицы стоит знак вопроса). Его необходимо
вычислить так, чтобы замкнутая дискретная
система:
находилась на границе устойчивости;
была настроена на процесс конечной длительности (оптимальная по быстродействию настройка).
Первый из этих пунктов требует решения алгебраического уравнения (4.11а) или (4.11б), а второй – (4.12а) или (4.12б). Уравнения (4.11а) и (4.12а) являются линейными и решаются легко, а уравнения (4.11б) и (4.12б) целесообразно решить численно, что и реализовано в предлагаемой программе расчета (М-файл сценарий) imp.m, которая приведена в приложении.
Рассмотрим это на примере. Допустим, что заданы следующие значения параметров передаточной функции непрерывной части системы – T1=3 c (фактически задан параметр а0), k=7,5 и значение величины заполнения импульса γ=0,8. Время квантования Т неизвестно. Процедура обращения к программе выглядит следующим образом:
>> imp
Введите значение величины постоянной времени А1 звена - T1
T1=3
Введите вектор параметров импульсной системы S, используемых для настройки на нужный режим
Первые 2 компонента вектора S, отвечают значениям двух из трех ("gamma", "T", "k") параметров, вводимых в заданной последовательности
третий компонент может принимать значения 1, 2 или 3. При этом 1 – отвечает поиску gamma", 2 – поиску "T", 3 – поиску "k".
S=[0.8 7.5 2]
Величина периода квантования при настройке на границу устойчивости T_kr=1.048
Величина периода квантования при настройке на режим кон. длительности T_opt=0.46936
Таким образом, если время квантования составляет 1,0480 с, то импульсная система находится на границе колебательной устойчивости, а если – 0,4694 с, то настроена на процесс конечной длительности (оптимальна по быстродействию).
Далее необходимо, настроив соответствующим образом каждый из блоков модели промоделировать протекание процессов в системе.
Исследуйте, как изменяются характеристики процессов (для любого из видов НЧС) при варьировании времени квантования и коэффициента усиления. Результат подтвердите графиками. Сделайте вывод.
Сравните найденные критические и оптимальные настройки для двух видов НЧС. Сделайте вывод.
Поясните отличия в характере процесса конечной длительности при включении в непрерывную часть интегрирующего и апериодического звеньев.
Во
второй части работы
рассчитывается переходной процесс в
импульсной системе, у которой НЧС –
идеальное интегрирующее звено, все
значения параметров системы соответствуют
найденным значениям для границы
устойчивости за исключением коэффициента
передачи интегрирующего звена – его
величина выбирается по формуле
![]() .
Далее следует:
.
Далее следует:
записать выражение для дискретной передаточной функции разомкнутой и замкнутой, используя формулы (4.6а) и (4.6б);
рассчитать установившееся значение по формуле (4.9);
составить рекуррентное разностное уравнение (4.8);
составить таблицу, аналогичную приведенной таблице пошагового расчета 4.2;
провести расчет переходного процесса в S-модели с соответствующими параметрами;
используя результаты моделирования, сохраненные в память программы, построить график в среде Matlab так, чтобы сравнить найденные значения с результатами расчета S-модели.
Для этого, следует построить график в среде Matlab так, чтобы отдельные отсчеты «отстояли» друг от друга на интервал времени квантования. Это можно осуществить правильным указанием шага выборки из массива, который записан в память программы. Построение графиков следует выполнять без соединения линиями символов, фиксирующих отдельные отсчеты. Такой график будет в наиболее наглядной форме представлять поведение решетчатой функции x[n]. Далее необходимо указать координаты каждой из «дискрет» на плоскости графика, используя функции контекстного меню объекта figure (открытого окна графика Matlab), и, в заключение, сравнить с результатами пошагового расчета.
Так, например сравним результаты рекуррентного расчета с непосредственным моделированием дискретной системы в пакете Simulink при заданном значении времени квантования модели Т=0,2 с. Результаты записывались в двухколоночный массив R. Шаг времени расчета модели (Max step size) составлял 0,01 с, поэтому шаг выборки составляет 0,2/0,01=20 и синтаксис команды имеет вид:
plot(R(1:20:201,1),R(1:20:201,2),'ko').
Рис. 4.6. Результаты моделирования переходного процесса в пакете Simulink. |

Результаты моделирования представлены на рис. 4.6. Для каждого из значений переходной функции непосредственно на графике указаны значения ее координат. Для этого в режиме Data Cursor (на панели Figure Toolbar) по каждой из точек графика производился щелчок ЛКМ при нажатой клавише Alt. Как видно из рис. 4.6 результаты моделирования совпадают с данными, приведенными в табл. 4.2.
В отчете должны быть представлены:
структурная схема исследуемой импульсной системы;
результаты расчета варьируемого параметра, соответствующего двум режимам работы импульсной системы (распечатку диалогового окна выполнения файла-сценария включать не следует!);
переходной процесс в системе при настройке на два этих режима;
анализ изменения переходного режима при изменениях варьируемых параметров системы;
выражение для передаточной функции замкнутой системы с вычисленными значениями параметров;
таблица результатов рекуррентного расчета переходного процесса с подтверждением в виде графика моделирования его;
письменный ответ на вопросы, указанные преподавателем.