

1Введение
В разделе «Введение» указывается тема курсового проекта и актуальность решаемой задачи. Необходимо коротко отразить преимущества и основные направления развития автоматизированного электропривода.
2Кинематическая схема рабочей машины, ее описание и технические данные
В этом разделе раскрывается принцип действия рабочей машины, приводится и описывается ее кинематическая схема, технические данные и технологические требования. Здесь же указывается род тока и тип электропривода, которые задаются руководителем курсового проектирования.
Схемы рабочих машин, описание технологических процессов работы, и варианты технических данных для проектирования представлены в приложении А. В приложении Б приведены основные формулы для расчета статических моментов рабочих механизмов.
1.1Основные требования к проектируемому электроприводу
Спроектированный в результате
работы над курсовым проектом электропривод
должен удовлетворять определенным
требованиям:
- должна быть обеспечена заданная производительность механизма;
- электродвигатель в процессе работы не должен перегреваться;
- электродвигатель должен выдерживать возникающие кратковременные перегрузки;
- перемещение
рабочего органа машины должно происходить
с заданной скоростью, отклонение которой
не должно превышать
![]() 5%;
5%;
- среднее ускорение рабочего органа машины в пусковых и тормозных режимах не должно превышать заданного значения;
- электропривод должен обеспечивать минимум капитальных затрат и потерь энергии для заданного варианта.
3Расчет нагрузочной диаграммы рабочей машины
Для того, чтобы ориентировочно оценить требуемую для данного механизма мощность двигателя, необходимо определить тем или иным способом мощность или момент производственного механизма на разных участках его работы и скорости движения рабочего органа механизма на этих участках. Другими словами, необходимо построить нагрузочную диаграмму производственного механизма, дополненную его тахограммой. В зависимости от типа механизма и режима его работы сложность этой задачи лежит в широком диапазоне (от простейшей – в случае вентилятора, компрессора и т.д., до сложнейшей – в случае уникального механизма, не имеющего аналога в практике).
Поэтому вопросы расчета и построения нагрузочных диаграмм производственных механизмов будут рассмотрены в отдельной работе кафедры автоматизированного электропривода.
Здесь же будем считать, что статические нагрузки рабочего органа механизма на разных участках работы определены, и скорости на этих участках известны. Режим работы механизма – повторно-кратковременный. Задание может отличаться ограничениями, накладываемыми на протекание переходных процессов. В данном курсовом проекте возможны два варианта: получение максимального быстродействия или ограничение допустимого ускорения рабочего органа механизма (ограничение момента двигателя в переходных процессах).
Поскольку электродвигатель и редуктор еще неизвестны, невозможно на данном этапе определить полные статические и динамические нагрузки электропривода. Поэтому в первом случае предварительный расчет мощности двигателя основывается только на учете статических нагрузок, а во втором случае появляется возможность учесть и часть динамических нагрузок, обусловленных изменениями кинетической энергии рабочих органов механизма.
Таким образом, та или иная нагрузочная диаграмма рабочего механизма (рисунки 3.1 и 3.2.) является заданием на проектирование непосредственно электропривода.
Механизм, работающий в повторно-кратковременном режиме, в каждом цикле совершает прямой ход с полной нагрузкой и обратный ход на холостом ходу или с малой нагрузкой. На рисунке 3.1 приведена нагрузочная диаграмма механизма без ограничения допустимого ускорения рабочего органа механизма, а на рисунке 3.2 с ограничением этого ускорения.

Рисунок 3.1
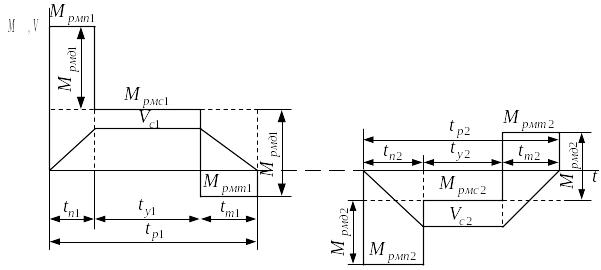
Рисунок 3.2
Здесь
![]() – статические моменты при прямом и
обратном ходах;
– статические моменты при прямом и
обратном ходах;
![]() – динамические
моменты при прямом и обратном ходах;
– динамические
моменты при прямом и обратном ходах;
![]() – пусковые моменты
при прямом и обратном ходах;
– пусковые моменты
при прямом и обратном ходах;
![]() – тормозные моменты
при прямом и обратном ходах;
– тормозные моменты
при прямом и обратном ходах;
![]() – скорости прямого
и обратного ходов;
– скорости прямого
и обратного ходов;
![]() – времена пуска,
торможения и установившегося движения
при прямом ходе;
– времена пуска,
торможения и установившегося движения
при прямом ходе;
![]() – времена пуска,
торможения и установившегося движения
при обратном ходе.
– времена пуска,
торможения и установившегося движения
при обратном ходе.
Для нагрузочной
диаграммы на рисунке 3.1 заданы скорости
![]()
![]() и длина перемещения
и длина перемещения
![]() .
Рассчитываются
.
Рассчитываются
![]() ,
,
![]() и
и
![]() .
.
Статические моменты
рабочего механизма при прямом и обратном
ходах для обеих нагрузочных диаграмм
![]() и
и
![]() в зависимости от типа механизма
определяются по выражениям, приводимым
в литературных источниках [5-11].
в зависимости от типа механизма
определяются по выражениям, приводимым
в литературных источниках [5-11].
Времена работы определяются по выражениям:
![]() ,
,
![]() . (3.1)
. (3.1)
Коэффициент (1.2-1.4) учитывает увеличение времени работы механизма из-за наличия в цикле двух пусков и двух торможений, когда скорость движения изменяется от 0 до установившегося значения (и наоборот).
Для нагрузочной
диаграммы на рисунке 3.2 заданы скорости
![]() и
,
длина перемещения
и допустимое ускорение
и
,
длина перемещения
и допустимое ускорение
![]() .
Рассчитываются
,
.
Рассчитываются
,
![]() ,
,
![]() ,
,
![]() .
.
Время пуска и торможения:
![]() ,
,
![]() . (3.2)
. (3.2)
Путь, проходимый рабочим органом машины за время пуска (торможения):
![]() ,
,
![]() . (3.3)
. (3.3)
Путь, проходимый рабочим органом машины за время установившегося движения:
![]() ,
,
![]() .
(3.4)
.
(3.4)
Время установившегося движения:
![]() ,
,
![]() . (3.5)
. (3.5)
Время работы механизма при прямом и обратном ходах:
![]() ,
,
![]() . (3.6)
. (3.6)
Динамические моменты рабочей машины:
![]() ,
,
![]() , (3.7)
, (3.7)
где
![]() – диаметр вращающегося элемента рабочей
машины, преобразующего вращательное
движение в поступательное (колесо, шкив,
барабан, шестерня, звездочка и т.п.), м,
– диаметр вращающегося элемента рабочей
машины, преобразующего вращательное
движение в поступательное (колесо, шкив,
барабан, шестерня, звездочка и т.п.), м,
![]() ,
,
![]() – моменты инерции рабочей машины при
прямом и обратном ходах.
– моменты инерции рабочей машины при
прямом и обратном ходах.
![]() . (3.8)
. (3.8)
![]() – моменты инерции
вращающихся элементов рабочей машины
при прямом (а) и обратном (б) ходах, кг
·м2,
– моменты инерции
вращающихся элементов рабочей машины
при прямом (а) и обратном (б) ходах, кг
·м2,
![]() – массы поступательно
движущихся частей рабочей машины
при прямом (а) и обратном (б) ходах, кг.
– массы поступательно
движущихся частей рабочей машины
при прямом (а) и обратном (б) ходах, кг.
Полный момент рабочего механизма в динамическом режиме (пуск, торможение) при прямом и обратном ходах определяется по выражениям:
![]() . (3.9)
. (3.9)
При построении нагрузочных диаграмм и тахограмм следует особое внимание уделить направлению движения рабочего органа механизма и знакам статических и динамических моментов. За положительное направление движения следует принять прямое направление движения с грузом. Соответственно, и момент сопротивления (статический) рабочего механизма при этом направлении движения тоже следует принять положительным. При этом необходимо помнить, что нагрузка может быть активной и реактивной и, таким образом, в принципе, слагаемые выражений (3.8) могут иметь любой знак.
Следует также заметить, что для курсового проектирования могут быть предложены нереверсивные механизмы (например, непрерывного транспорта), работающие в повторно-кратковременном режиме с переменной нагрузкой в цикле. Это тоже должно быть учтено при построении нагрузочной диаграммы производственного механизма.