

2.1.5 Кількість ступенів пускового резистора.
Пусковий резистор має кількість ступенів m причому повний опір :
 (2.16)
(2.16)
де
 , а
, а
 .
.
У процесі
пуску поступово виконують перемикання
при струмі І2. Коли
вимикають Rp1,
у резисторі залишається опір
 .
.
Таким чином,
буде:
 ,
, ….
….
 .
.
Згідно
виразам (2.2) і (2.15), прирівняємо перепади
швидкостей

при першому
перемиканні (крапка 2) на сусідніх
характеристиках у крапках 2
і 3
відповідно:
 ,
,
 .
.
Отже, повний
опір кола на другій ступені
 ,
а опір першої ступені пускового резистора
:
,
а опір першої ступені пускового резистора
:
 .
.
Для другого
перемикання (крапка 4 на рис. 2.4 ), поки
вимикають Rp2
, буде :
 і
і
 .
.
А для будь
якого і-того
перемикання
 .
.
Резистор
на і-тій
ступені має опір
 .
.
Для останнього
перемикання
 ,
тобто
,
тобто
 .
(2.17)
.
(2.17)
Якщо перетворити (2.17), то можливо отримати наступний вираз :

Таким чином,
можливо визначити кількість ступенів
пускового резистора :
 (2.18)
(2.18)
2.1.7 Механічна характеристика у гальмових режимах
Як відомо гальмових режимів три:
рекуперативне гальмування,
динамічне (резисторне) гальмування,
гальмування противоувімкненням.
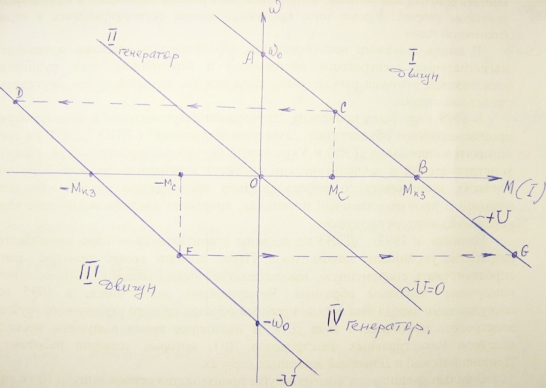
Рис. 2.5
Три характеристики на рис.2.5 відповідають напрузі на двигуні (+U), напрузі (-U), яка є дзеркальним відображенням першої, і характеристики, коли U=0 - вона проходить через початок координат. Усі три характеристики побудовані згідно рівняння (2.2) .
Режим холостого ходу визначається першою А, коли М = 0, а ω = ω0 .
Режим короткого замикання, крапка В, коли (Е = 0 ), ω = 0, а струм
Рекуперативне
гальмування, як відомо
із курсу “Електричні машини” існує,
коли ω >ω0
і
 .
Тоді струм Ія
змінює свій знак і разом із ним – момент
.
Тоді струм Ія
змінює свій знак і разом із ним – момент
 .
.
Динамічне
гальмування – при
цьому якір двигуна вимикають з мережі,
тобто U
= 0, і замикають на
струмообмежувальний резистор .
За допомогою цього регулювального
резистора
.
За допомогою цього регулювального
резистора
 можливо змінити опір якірного
кола .
можливо змінити опір якірного
кола .
У режимі
динамічного гальмування характеристика
проходить через початок координат,
струм -
 ,
швидкість за (2.2)
,
швидкість за (2.2)
 ,
а гальмівний момент
,
а гальмівний момент
 .
.
Оскільки
жорсткість
 ,
то вона зменшується із зростанням опору
Rрег.
Енергія у двигун поступає зі сторони
валу.
,
то вона зменшується із зростанням опору
Rрег.
Енергія у двигун поступає зі сторони
валу.
Гальмування противовмиканням – це режим генератора послідовно з мережею . Він може бути здійснений двома способами. Слід нагадати, що існують два види моментів опору: реактивний момент, що змінює свій знак разом зі зміною знаку швидкості і активний момент, що не змінює свій знак зі зміною знаку швидкості. Приклад останнього – це момент статичного опору, котрий створюється гравітаційними силами, коли крановий двигун піднімає або опускає вантаж.
1-й спосіб. Хай крановий двигун піднімає вантаж, а у той же час на гак додають вантаж. Швидкість двигуна буде зменшуватись і зменшуватись, потім двигун зупиниться, тобто ω=0, а потім ротор двигуна почне розкручуватись у протилежну сторону, тобто стане ω<0.
У цьому
разі ЕРС
 ,
а струм
,
а струм
 ,
тобто для його обмеження слід
використовувати струмообмежувальний
додатковий резистор.
,
тобто для його обмеження слід
використовувати струмообмежувальний
додатковий резистор.
2-й спосіб
– це зміна полярності живлення якоря,
коли він обертається, тобто
поки ω>0.
Але замість напруги U
якір двигуна подано (-U),
тоді струм
 ,
тобто потрібен додатковий резистор для
обмеження кидка струму.
,
тобто потрібен додатковий резистор для
обмеження кидка струму.