

Розділ 1. Електропривод, його структурна схема та елементи.
Загальні відомості. Електропривод та його елементи.
Електропривод - це електромеханічна система, котра складається із взаємодіючих електричних, електромеханічних і механічних перетворювачів, керуючих та інформаційних пристроїв і пристроїв, які поєднані з електричними, механічними, керуючими та інформаційними системами, призначених для приведення у рух виконавчих органів робочої машини і керування цим рухом з метою виконання технічного процесу.
Структурна схема автоматизованого електроприводу має такий вигляд:
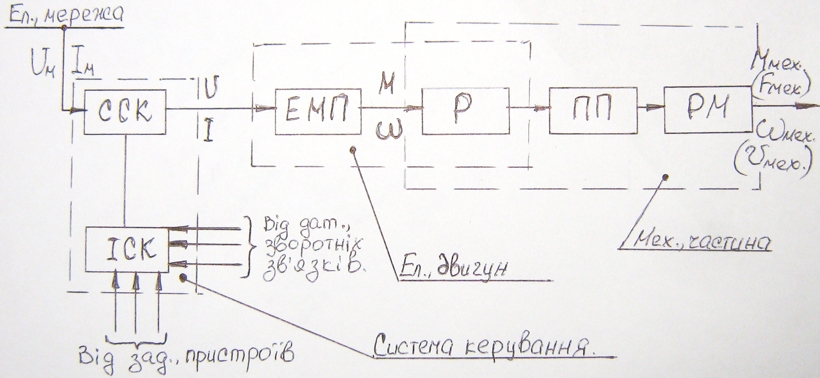
Рис. 1.1
На рис. 1.1 джерелом енергії є електрична мережа, енергія подається до системи керування, яка складається із силової та інформаційної систем. Перетворена електроенергія подається у електромеханічний перетворювач
(електродвигун), у складі якого може бути редуктор (редуктор також може бути безпосередньо у механічній частині двигуна). Механічна частина включає передавальний пристрій і, нарешті, робочу машину, що має або поступальний, або обертальний рух і виконує технологічний процес. Як бачимо у цій системі існує багаторазове перетворення енергії, а електродвигун є основою цієї системи.
Нагадаємо, що робота електродвигуна базується на 3-х законах електромеханіки:
1-й закон – електромеханічне перетворення енергії неможливе з ККД, який дорівнює 100% (тобто без витрат енергії).
2-й закон – усі електромеханічні перетворювачі (електричні машини) енергозворотні, тобто вони можуть і двигунами, і генераторами.
3-й закон – електромеханічне перетворення енергії виконується полями, що є взаємонерухомими.
Усі ці три закони будуть використовуватись далі.
На ряду із електродвигуном, електропривод має ще ряд пристроїв.
Перетворювальний пристрій - забезпечує перетворення роду струму напруги частоти тощо.
Передавальний пристрій - забезпечує передачу механічної енергії від двигуна до виконавчого органу робочої машини.
Керуючий пристрій – використовується для керування усіма елементами електроприводу, забезпечує необхідні режими роботи машини.
Різновиди електроприводів, їх характеристики та режими роботи.
Розрізняють головний електропривод, що забезпечує основний рух виконавчого органу робочої машини та допоміжний, що забезпечує виконання додаткових операцій
За родом електричної енергії електроприводи можуть бути із двигунами змінного, чи постійного струму.
Електропривод може бути багатодвигунним та однодвигунним, з обертальним або поступальним рухом(лінійні двигуни) реверсивним і нереверсивним.
У системах електроприводів використовують 4 види силових перетворювачів: випрямлячі, інвертори, перетворювачі частоти і напруги та імпульсні перетворювачі напруги постійного струму
Електроприводи можуть працювати у стійкому або перехідному режимах, які описуються рівнянням М - Мс =Мдин, де:
М – електромагнітний момент двигуна,
Мс – статичний момент опору,
Мдин. =
 –
динамічний момент, де J
– момент інерції.
–
динамічний момент, де J
– момент інерції.
Координатне
перетворення характеристики електроприводу
– це регулювання швидкості, прискорення
та переміщення. Регулювання координат
– це цілеспрямований вплив, який дозволяє
регулювати швидкість ω,
момент М,
прискорення
 і переміщення виконавчих органів.
і переміщення виконавчих органів.