

80 Шагов

Розрахунок стріли провисання:



3.3 Оптимізація приводних станцій установок сортування важкої пошти
У загальному випадку оптимізація приводних станцій РК ПЗЗ та УСТП припускає х попередній узагальнений кінематичний розрахунок , в результаті якого по заданій продуктивності конвеєра визначається швидкість його тягового органу (ланцюг,стрічка),числа обороту приводного валу (зірочки,барабана), загальне передавальне число , після чого вибирається тип електродвигуна за заздалегідь розрахованою середньої і максимальної - оптимальної потужності приводу,вибирається відповідним типом редуктора,зазвичай 20 або 40 , після чого виконується розрахунок передавального числа проміжної передачі і виконується попередній вибір ведучої зірочки ПЦП .
Після цих попередніх розрахунків виконується детальний розрахунок параметрів ПЦП , який включає оптимізацію числа ланок зірочок ПЦП , розраховується довжина ланцюга , розраховується міжосьова відстань зірочок, розраховується стріла провисання ланцюга для зменшення зносу ланцюга.
Після цього виконується аналіз надійності ланцюгової передачі , яка включає в себе розрахунок швидкості ланцюга , а також допустиму кількість ударів зубів , ланок при набіганні ланцюга з використанням таких характеристик , як обертовий момент на валу приводної зірочки , коефіцієнт експлуатації ланцюга , що враховує умови роботи кола , типу її мастила , а також конструкцію ланцюгової передачі: вертикальне чи горизонтальне розташування цепі. Після цього виконується перевірка ланцюга на міцність з урахуванням виконання умови напрацювання 10 тис. годин.
Середня швидкість ланцюга:
 м/с
, 0,23<10 м/с
м/с
, 0,23<10 м/с
n1 – число обертів ведучої зірочки.
 =1000/20
= 50 обер/хв.
=1000/20
= 50 обер/хв.
Число ударів ланок ланцюга при набіганні на зуби та збігання з них:
 =
= 0,3<12,1
0,3<12,1
Експлуатаційний коефіцієнт враховуючий умову монтажу ПЦП дорівнює:
Кє = К1К2К3+К4К5К6
Кє=(2∙1∙1,25)+( 1,3∙1∙1,25)=4,125
Вибраний крок ланцюга повинен задовольняти умові:

 =
=
 =20,9
H
=20,9
H
Більш коректна перевірка правильності вибору ланцюга:
 =
= =1,82<24,5
=1,82<24,5
Коефіцієнт запасу міцкості ланцюга визначається за формулою:
 =
= =
= =4,3<[5…6]
=4,3<[5…6]
де
 – коефіцієнт динамічності.
– коефіцієнт динамічності.
 =475,6 H,
=475,6 H,
де
 -
корисне
навантаження, яке передається ланцюгом
– окружна сила.
-
корисне
навантаження, яке передається ланцюгом
– окружна сила.
 =1∙0,6∙9,8∙1,39=8,2
=1∙0,6∙9,8∙1,39=8,2

 =1,39∙
=1,39∙ =0,07
=0,07
Обираємо ланцюг ЦРА1 з руйнівним навантаженням q=6500. Тоді запас міцності складає:

Розрахунковий запас міцності задовольняє умову S>[S], де[S]-нормативне значення. Таким чином даний результат перевищує необхідне напрацювання ланцюга в 10 000 год.
ВИСНОВКИ
В даному курсовому проекті було розглянуто такі розділи, а саме : у першому розділі “Порівняльний аналіз компонувальних рішень та технічних характеристик розподільного конвеєра установок сортування важкої пошти” було наведено побудово, принципи дії та класифікація установок для сортування важкої пошти, ланцюгові конвеєри, а також представлена узагальнена кінематична схема розподільного конвеєра сортування важкої пошти, наведені матеріали по напівавтоматичній установці УСГ-К і візкових та пластичних УСВП.
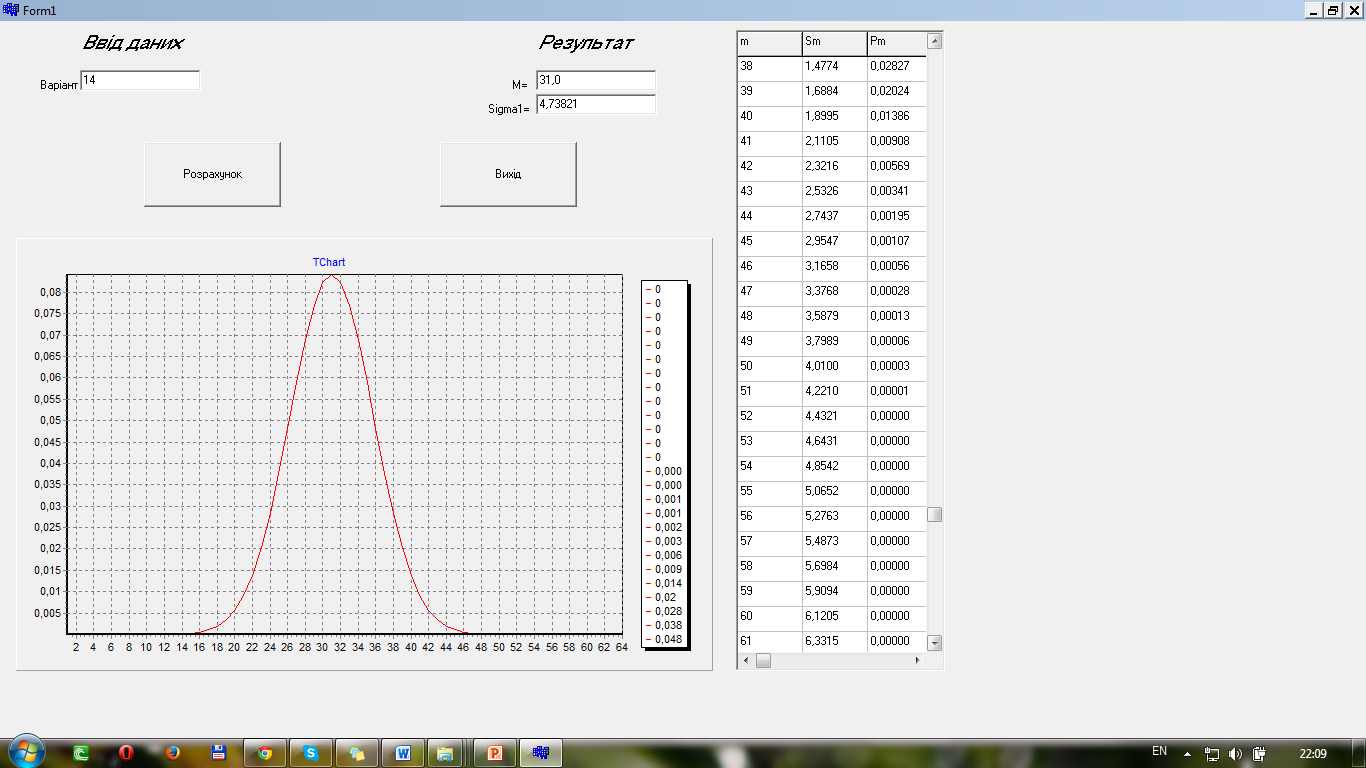
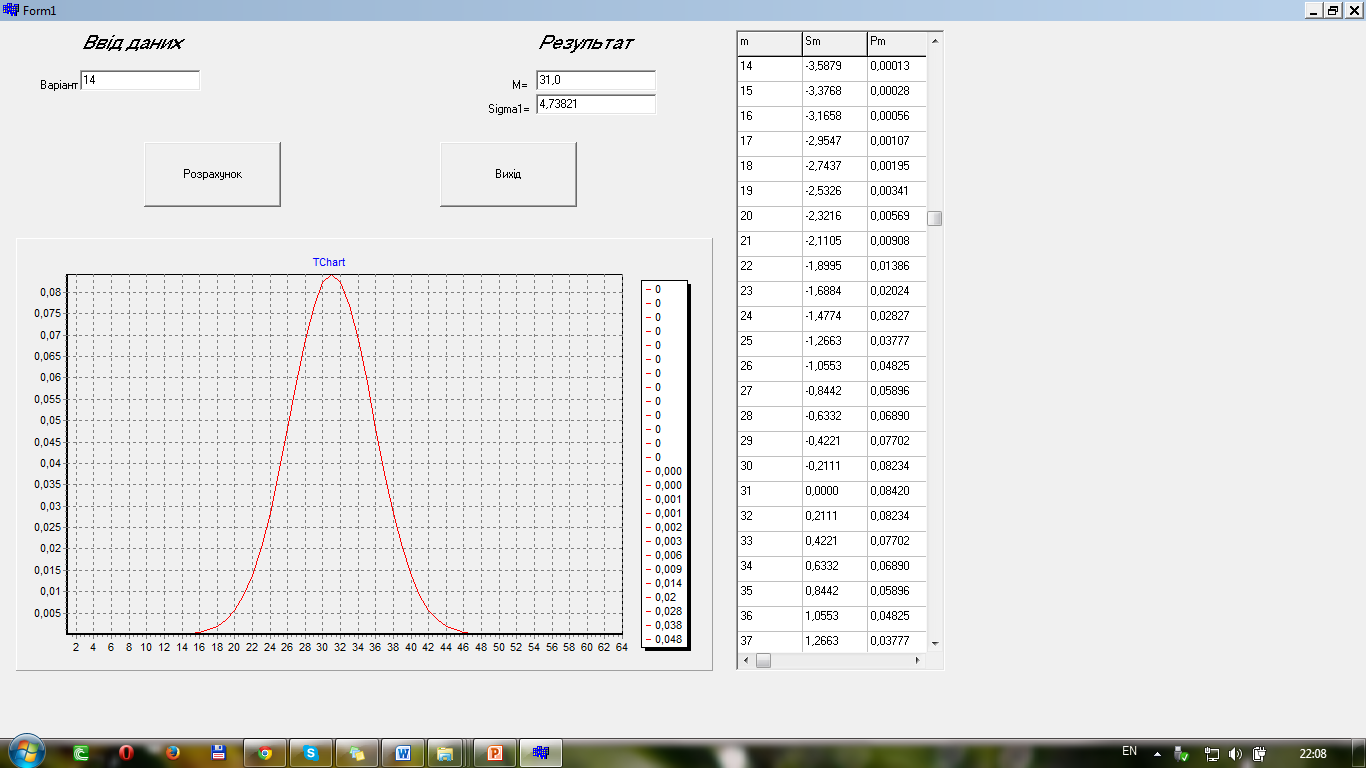
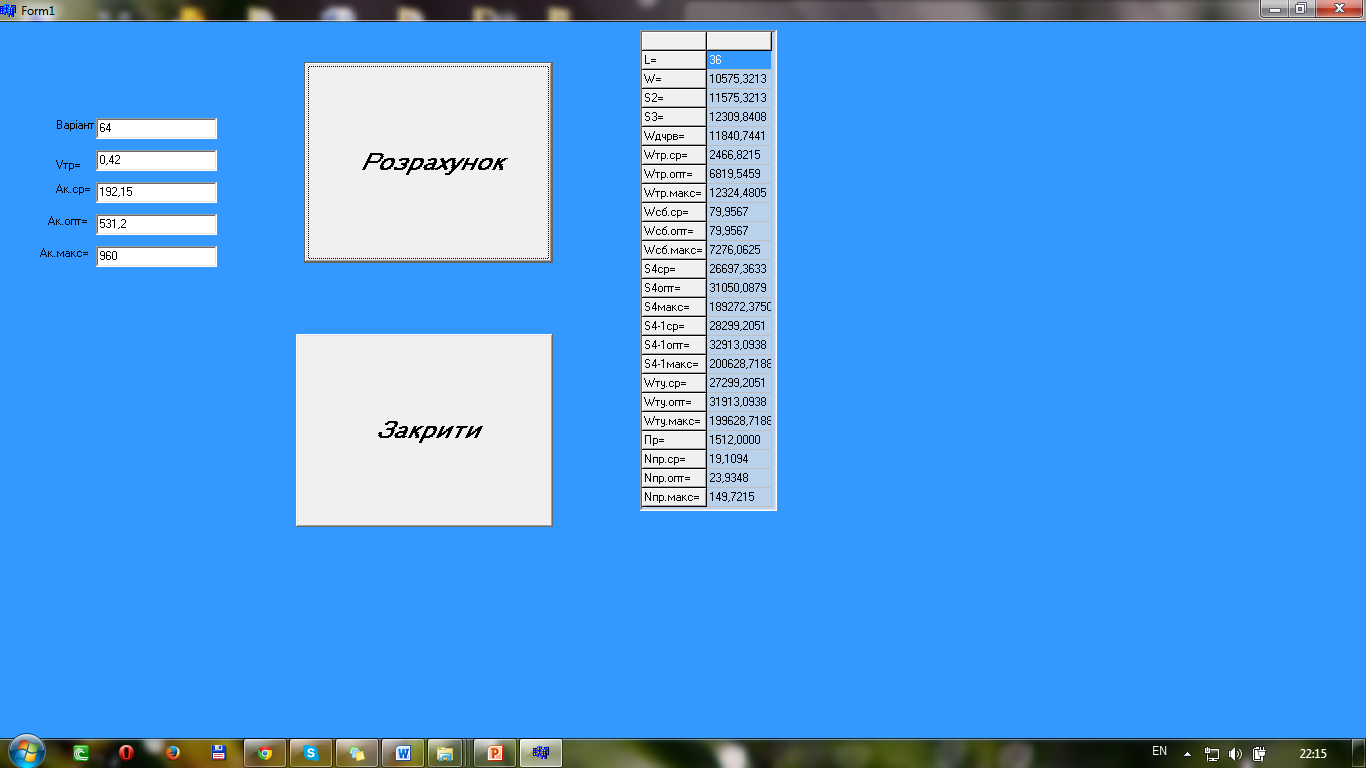
У другому розділі “Оптимізація потужності привода” ,представлені розрахунки щодо оптимізації вагового навантаження, які були зведені у таблиці, а також по результатах яких побудовано графік ймовірності перезавантаження. Далі проводився розрахунок середньої, оптимальної та максимальної потужностей приводу, які складають відповідно:
Nпср=19,10кВт, Nпопт=23,9кВт, Nпмакс= 149,72 кВт
У третьому розділі представлено оптимізацію приводної станції розподільного конвеєра, а саме кінематичний розрахунок РК та оптимизацію проміжних передач розподільного конвеєра (РК) і оптимізацію приводних станцій установок сортування важкої пошти.
ДОДАТКИ
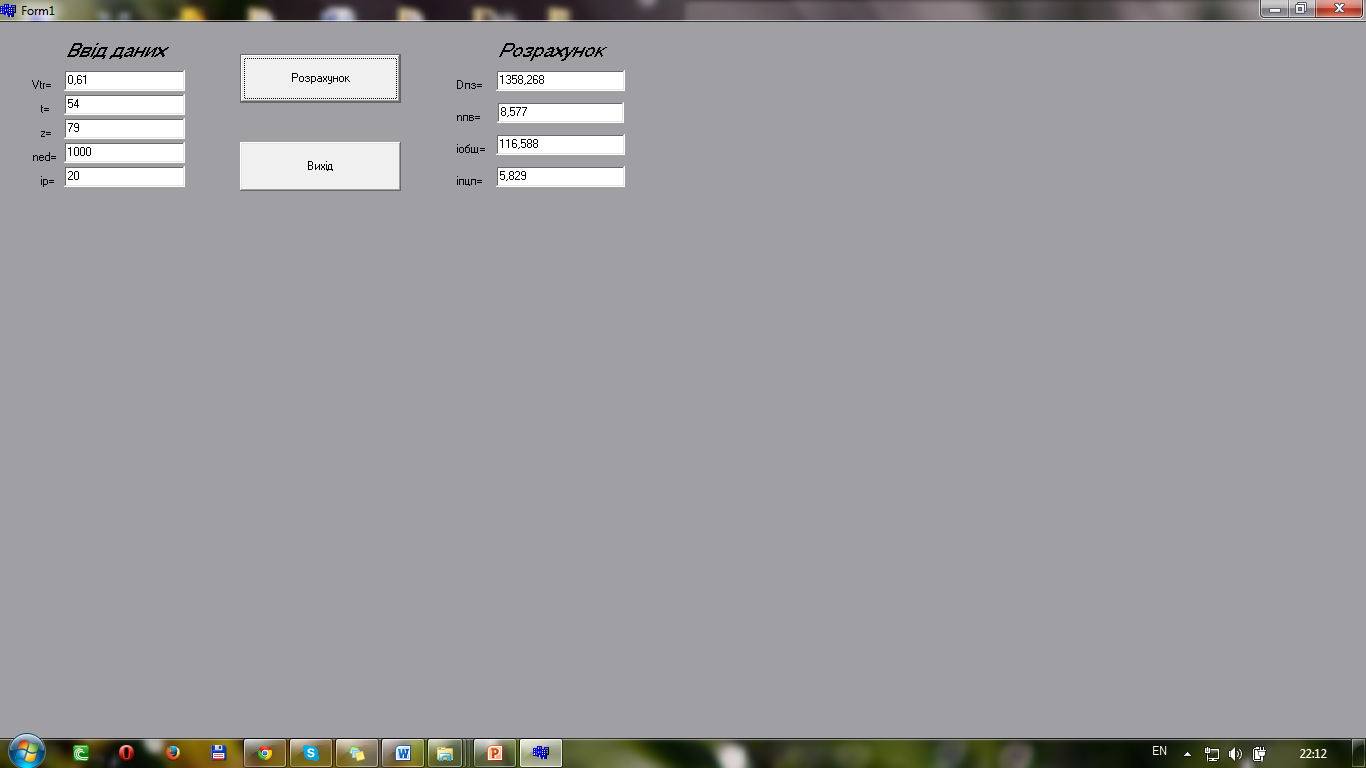
ДОДАТОК №1. Інтерфейс кінематичного розрахунку РК
ДОДАТОК №2.Програма кінематичного розрахунку РК
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include <math.h>
#include "Unit1.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma resource "*.dfm"
TForm1 *Form1;
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
float Vtr,t,z,Dpz,npv,ned,iob,ip,ipcp;
Vtr=StrToFloat(Edit1->Text);
t=StrToFloat(Edit2->Text);
z=StrToFloat(Edit3->Text);
Dpz=t/sin(M_PI/z);// розрахунок діаметра окружності приводної зірочки
Edit4->Text=FormatFloat("0.000",Dpz);
npv=(60*Vtr*1000)/(M_PI*Dpz); // розрахунок числа оборотів приводного вала
Edit5->Text=FormatFloat("0.000",npv);
ned=StrToFloat(Edit6->Text);
iob=ned/npv; // розрахунок загального передаточного числа приводної станції
Edit7->Text=FormatFloat("0.000",iob);
ip=StrToFloat(Edit8->Text);
ipcp=iob/ip; //розрахунок передаточного числа проміжного ланцюгової передачі
Edit9->Text=FormatFloat("0.000",ipcp);
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
{
Close();
}
//---------------------------------------------------------------------------
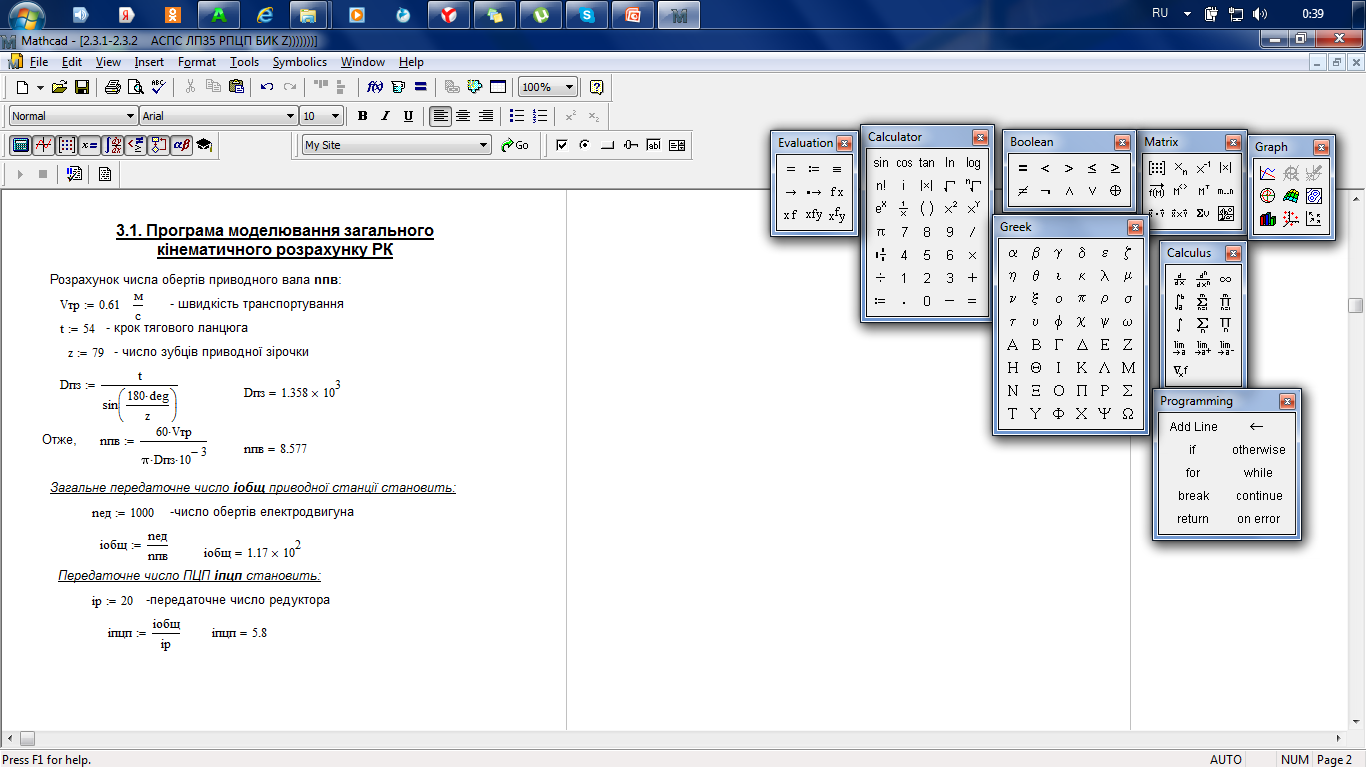
ДОДАТОК №3. Розрахунок кінематичного розрахунку РК в MathCad
ДОДАТОК №4. Інтерфейс для розрахунку оптимізації вагового навантаження
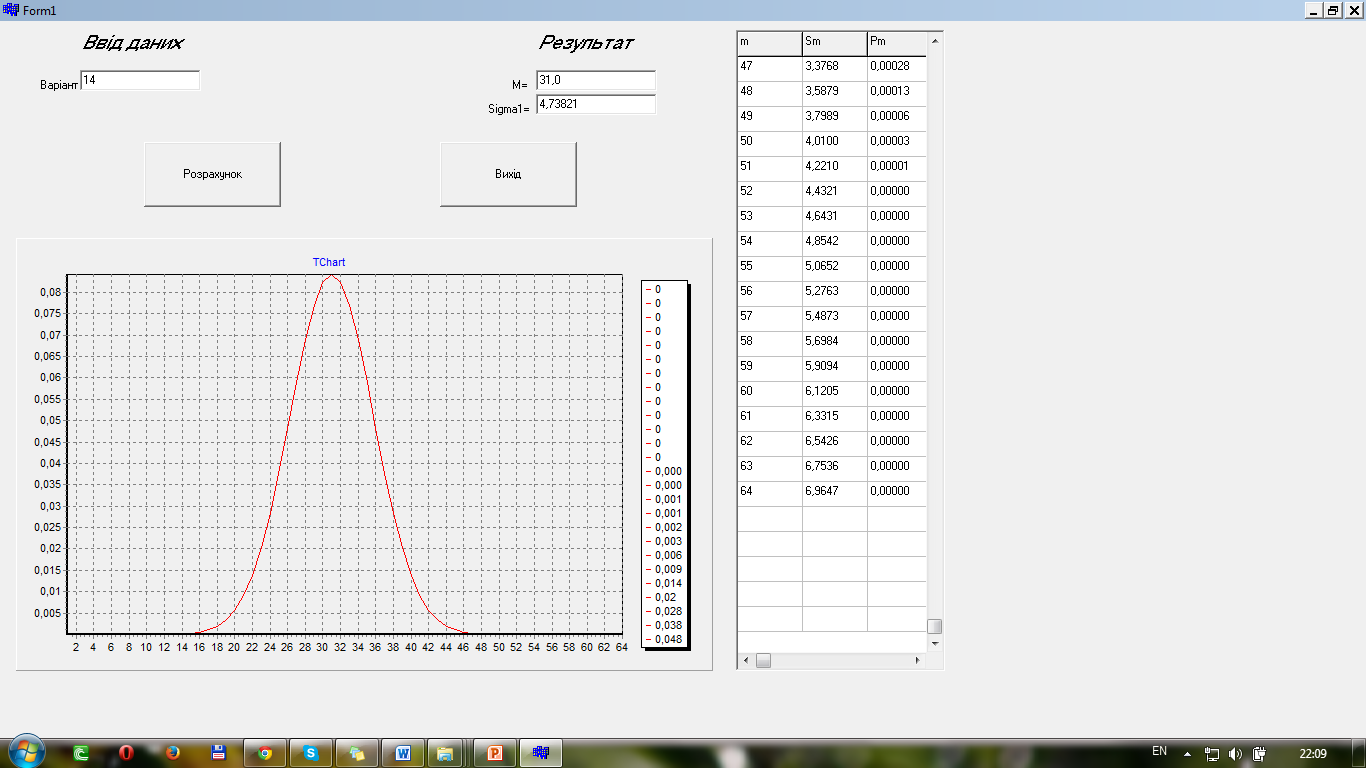
ДОДАТОК №5. Програма для розрахунку оптимізації вагового навантаження
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include <math.h>
#include "Unit1.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma resource "*.dfm"
TForm1 *Form1;
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{ StringGrid1->Cells[0][0]="m";
StringGrid1->Cells[1][0]="Sm";
StringGrid1->Cells[2][0]="Pm";
int n1=StrToInt(Edit1->Text);
int n=n1+50;
float M=(n-1)/2;
Edit2->Text=FormatFloat("0.0",M);
int m[70],i;
for(i=0;i<=n;i++)
m[i]=i+1;
const float sigma=2.85;
float sigma1=(sqrt((n*n-1)/(sigma*n)));
Edit3->Text=FormatFloat("0.00000",sigma1);
float Sm[70];
for(i=0;i<n;i++)
{Sm[i]=(m[i]-M)/sigma1;
StringGrid1->Cells[1][i+1]=FormatFloat("0.0000",Sm[i]); }
for(i=0;i<n;i++){
float Pm=(exp((-(m[i]-M)*(m[i]-M))/(2*sigma1*sigma1))/(sigma1*sqrt(2*M_PI)));
StringGrid1->Cells[2][i+1]=FormatFloat("0.00000",Pm);
StringGrid1->Cells[0][i+1]=IntToStr(m[i]);
Series1->AddXY(m[i],Pm,"",clRed);
}
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
{
Close();
}
//---------------------------------------------------------------------------
ДОДАТОК №6. Інтерфейс для розрахунку середньої, оптимальної та максимальної потужностей приводу
ДОДАТОК №7. Програма розрахунку середньої, оптимальної та максимальної потужностей приводу
//---------------------------------------------------------------------------
#include <vcl.h>
#pragma hdrstop
#include <math.h>
#include "Unit1.h"
//---------------------------------------------------------------------------
#pragma package(smart_init)
#pragma resource "*.dfm"
TForm1 *Form1;
//---------------------------------------------------------------------------
__fastcall TForm1::TForm1(TComponent* Owner)
: TForm(Owner)
{
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button1Click(TObject *Sender)
{
int n;
float L,S1,S2,W,S3,S4,Wrw,Wdu,Wtr,Wcbcr,Wcbopt,Wcbmax,Wtr1,Wtr2,Wtr3,S5,Akcr,Akopt,Akmax,S5cr,S5opt,S5max,S51,S52,S53,W1,W2,W3;
float vtr=StrToFloat(Edit5->Text);
n=StrToFloat(Edit1->Text);
L=4+(n/2)*1;
W=(25.62*9.8*L*0.117)*10;
S2=(1000+W);
S3=1.06*S2+40;
Wdu=(25.62*9.8*L*0.131)*10;
Akcr=StrToFloat(Edit2->Text);
Akopt=StrToFloat(Edit3->Text);
Akmax=StrToFloat(Edit4->Text);
Wtr1=0.131*9.8*Akcr*10;
Wtr2=0.131*9.8*Akopt*10;
Wtr3=0.131*9.8*Akmax*10;
Wcbcr=((6*0.14+9*0.14)*(tan(M_PI/9)+0.131))/0.13*10;
Wcbopt=((6*0.14+9*0.14)*(tan(M_PI/9)+0.131))/0.13*10;
Wcbmax=((((30*0.14+9*0.14)*(tan(M_PI/9)+0.131))/0.13)*35)*10;
S5cr=S3+Wcbcr+Wdu+Wtr1;
S5opt=S3+Wcbopt+Wdu+Wtr2;
S5max=S3+Wcbmax*21+Wdu+Wtr3;
S51=1.06*S5cr;
S52=1.06*S5opt;
S53=1.06*S5max;
W1=S51-1000;
W2=S52-1000;
W3=S53-1000;
float Pp=3600*vtr/1;
float N1,N2,N3;
N1=W1*vtr/(0.75*0.8*1000);
N2=W2*vtr/(0.7*0.8*1000);
N3=W3*vtr/(0.7*0.8*1000);
StringGrid1->Cells[1][1]=FloatToStr(L);
StringGrid1->Cells[1][2]=FormatFloat("0.0000",W);
StringGrid1->Cells[1][3]=FormatFloat("0.0000",S2);
StringGrid1->Cells[1][4]=FormatFloat("0.0000",S3);
StringGrid1->Cells[1][5]=FormatFloat("0.0000",Wdu);
StringGrid1->Cells[1][6]=FormatFloat("0.0000",Wtr1);
StringGrid1->Cells[1][7]=FormatFloat("0.0000",Wtr2);
StringGrid1->Cells[1][8]=FormatFloat("0.0000",Wtr3);
StringGrid1->Cells[1][9]=FormatFloat("0.0000",Wcbcr);
StringGrid1->Cells[1][10]=FormatFloat("0.0000",Wcbopt);
StringGrid1->Cells[1][11]=FormatFloat("0.0000",Wcbmax);
StringGrid1->Cells[1][12]=FormatFloat("0.0000",S5cr);
StringGrid1->Cells[1][13]=FormatFloat("0.0000",S5opt);
StringGrid1->Cells[1][14]=FormatFloat("0.0000",S5max);
StringGrid1->Cells[1][15]=FormatFloat("0.0000",S51);
StringGrid1->Cells[1][16]=FormatFloat("0.0000",S52);
StringGrid1->Cells[1][17]=FormatFloat("0.0000",S53);
StringGrid1->Cells[1][18]=FormatFloat("0.0000",W1);
StringGrid1->Cells[1][19]=FormatFloat("0.0000",W2);
StringGrid1->Cells[1][20]=FormatFloat("0.0000",W3);
StringGrid1->Cells[1][21]=FormatFloat("0.0000",Pp);
StringGrid1->Cells[1][22]=FormatFloat("0.0000",N1);
StringGrid1->Cells[1][23]=FormatFloat("0.0000",N2);
StringGrid1->Cells[1][24]=FormatFloat("0.0000",N3);
StringGrid1->Cells[0][1]=("L=");
StringGrid1->Cells[0][2]=("W=");
StringGrid1->Cells[0][3]=("S2=");
StringGrid1->Cells[0][4]=("S3=");
StringGrid1->Cells[0][5]=("Wдчрв=");
StringGrid1->Cells[0][6]=("Wтр.ср=");
StringGrid1->Cells[0][7]=("Wтр.опт=");
StringGrid1->Cells[0][8]=("Wтр.макс=");
StringGrid1->Cells[0][9]=("Wсб.ср=");
StringGrid1->Cells[0][10]=("Wсб.опт=");
StringGrid1->Cells[0][11]=("Wсб.макс=");
StringGrid1->Cells[0][12]=("S4ср=");
StringGrid1->Cells[0][13]=("S4опт=");
StringGrid1->Cells[0][14]=("S4макс=");
StringGrid1->Cells[0][15]=("S4-1ср=");
StringGrid1->Cells[0][16]=("S4-1опт=");
StringGrid1->Cells[0][17]=("S4-1макс=");
StringGrid1->Cells[0][18]=("Wту.ср=");
StringGrid1->Cells[0][19]=("Wту.опт=");
StringGrid1->Cells[0][20]=("Wту.макс=");
StringGrid1->Cells[0][21]=("Пр=");
StringGrid1->Cells[0][22]=("Nпр.ср=");
StringGrid1->Cells[0][23]=("Nпр.опт=");
StringGrid1->Cells[0][24]=("Nпр.макс=");
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Button2Click(TObject *Sender)
{
Close();
}
//------------------------------------------------------------------------
СПИСОК ВИКОРИСТАНОЇ ЛІТЕРАТУРИ
Ланда В.И., Буланов Э.А., Израилит Л.А. Установки для сортировки грузов.М.:Связь, 1968-80с.
Буланов Э.А., Третенко Ю.И., Лебедева Е.В. Подъемнотранспортные устройства почтовой связи.М.:Радио и связь, 1985.
Чернавский С. А и др. Проектирование механических передач.М.: Машиностроение, 1976.
Д.В.Чернилевский. Курсовое поектирование деталей машин и механизмов.М.: "Высшая школа", 1999.
Соколов В.П.Почтообрабатывающие машины и механизмы. М.:Связь 1980
Буланов И. А. и др. Подъемно-транспортные установки почтовой связи. М.:1985