

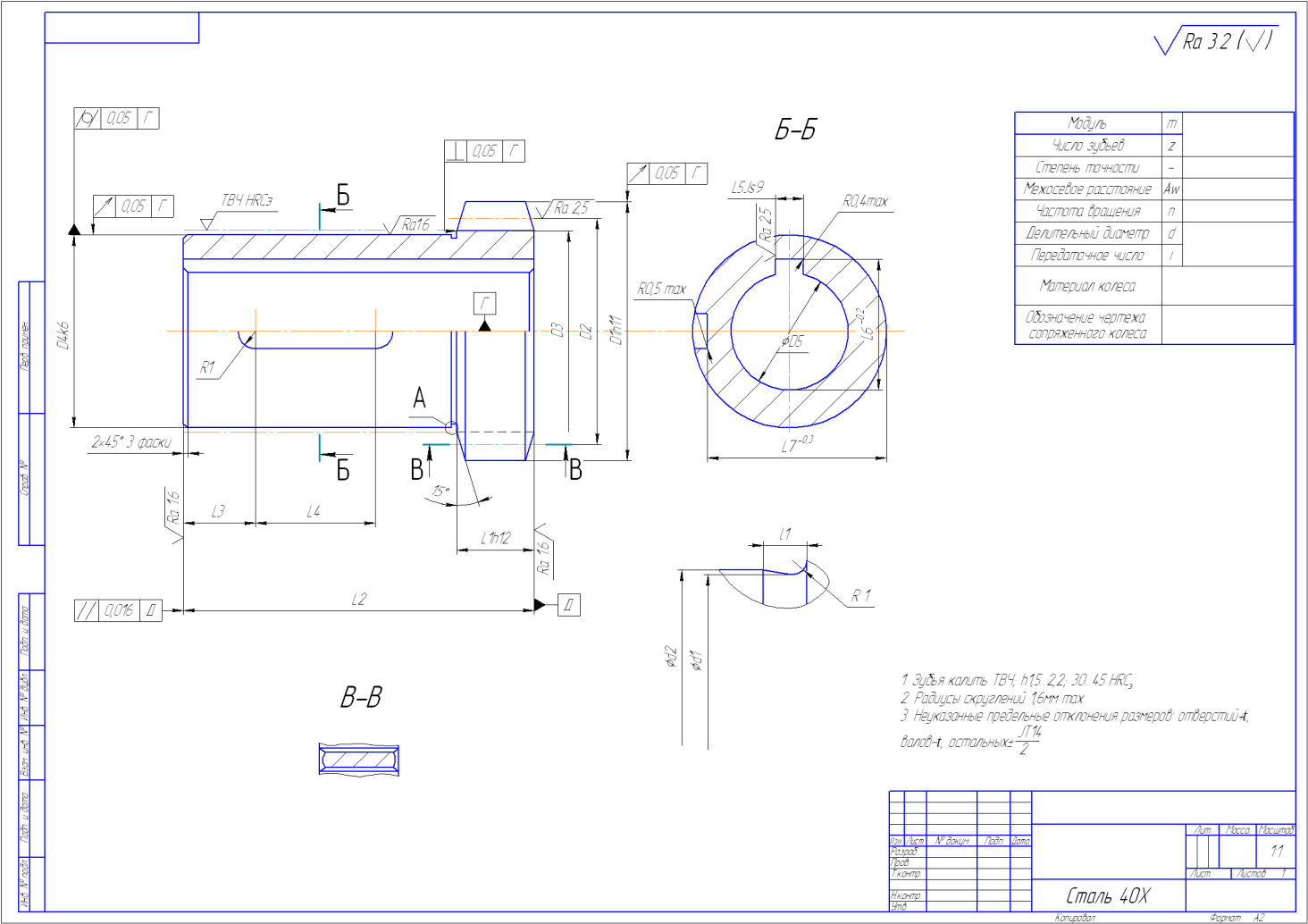
30. Привести эскиз детали поз. 5 (лист 97) с простановкой посадок, отклонений геометрической формы поверхностей, технических требований и термообработки.
32 Гидростатические направляющие получают все
большее
распространение в станках в силу ряда
достоинств обеспечение режима жидкостного
трения при любых скоростях и в связи с
этим полное устранение износа, высокие
демпфирующие свойства, равномерность
и высокая чувствительность точных
исполнительных движений. К недостаткам
гидростатических направляющих
следует отнести сложность системы
смазки и трудности, связанные с
надежной фиксацией перемещаемого узла
в заданной позиции. 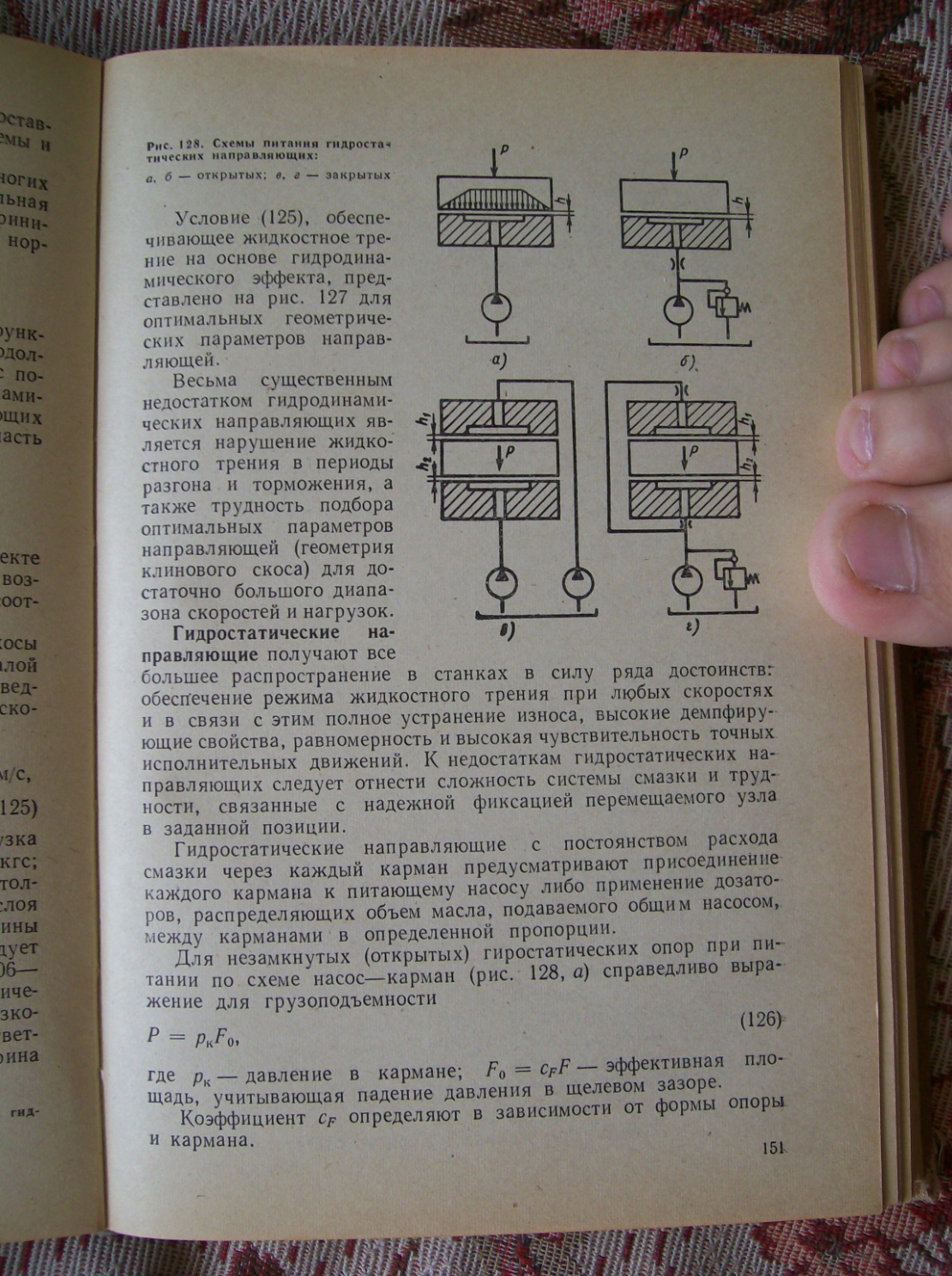 Гидростатические направляющие с
постоянством расхода смазки через
каждый карман предусматривают
присоединение каждого кармана к питающему
насосу либо применение дозаторов,
распределяющих объем масла, подаваемого
общим насосом, между карманами в
определенной пропорции.
Гидростатические направляющие с
постоянством расхода смазки через
каждый карман предусматривают
присоединение каждого кармана к питающему
насосу либо применение дозаторов,
распределяющих объем масла, подаваемого
общим насосом, между карманами в
определенной пропорции.
Для незамкнутых (открытых) гиростатических опор при питании по схеме насос—карман (рис. 128, а) справедливо выражение для грузоподъемности
где Рк — давление в кармане; Fo = cFF — эффективная площадь, учитывающая падение давления в щелевом зазоре.
Коэффициент cF определяют в зависимости от формы опоры и кармана.
Для симметричной прямоугольной опоры
![]()
где L, В — соответственно длина и ширина опоры; I, b — соответственно длина и ширина кармана.
Постоянный расход смазки Q, протекающей через зазор, связан с давлением в кармане и сопротивлением щели R соотношением

причем сопротивление щели может быть представлено в виде
 где
[к
—
динамический коэффициент вязкости; h
—
величина зазора; Са—
коэффициент, зависящий от формы опоры
и кармана.
где
[к
—
динамический коэффициент вязкости; h
—
величина зазора; Са—
коэффициент, зависящий от формы опоры
и кармана.
Для прямоугольного кармана
![]() 130
130
С учетом выражений (128) и (129) грузоподъемность гидростатической опоры можно привести к виду
![]() (131)
(131)
Жесткость незамкнутой гидростатической опоры с постоянным расходом
![]() 132
132
причем знак минус означает, что с увеличением нагрузки зазор уменьшается. Незамкнутая гидростатическая опора с питанием от общего насоса через дроссель к каждому карману (рис. 128, б) характеризуется равенством расхода жидкости через дроссель и щель
![]()
где рн— давление насоса.
Сопротивление дросселей трения
![]()
(134) где l0 d0 — соответственно длина и диаметр отверстия дросселя.
Формулу (133) с учетом выражений (129) и (134) приводят к виду
![]()
где т = Pk/Pн — характеристика дросселя (0 < т < 1).
Жесткость гидростатической опоры с дроссельной системой питания
![]()
и в оптимальном случае при mопт =2/3
![]()
Полученная жесткость несколько меньше, чем жесткость, определяемая по формуле (132) гидростатической опоры с постоянным расходом. Замкнутая гидростатическая опора (рис. 128, е) с системой питания насос—карман характеризуется грузоподъемностью, которая может быть представлена в виде
![]()
и соответственно жесткость этой опоры
![]()
где
h0—первоначальная
величина рабочего зазора; ср
(е,
k)
и
Cj
(e,
k)
—
коэффициенты, определяемые в зависимости
от относительного смещения
![]() и
различия в противоположных опорах
и
различия в противоположных опорах
![]() (индекс
1 для основной опоры,
(индекс
1 для основной опоры,
а
индекс 2 для замыкающей). Обычно0<=K<=1,
и при k=
0 опора
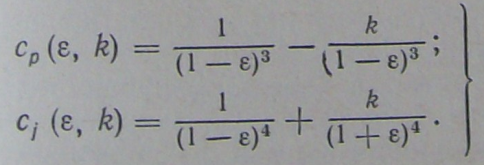
превращается в незамкнутую. Коэффициенты
ср
(е,
k)
и
 определяют
выражениями:
определяют
выражениями:
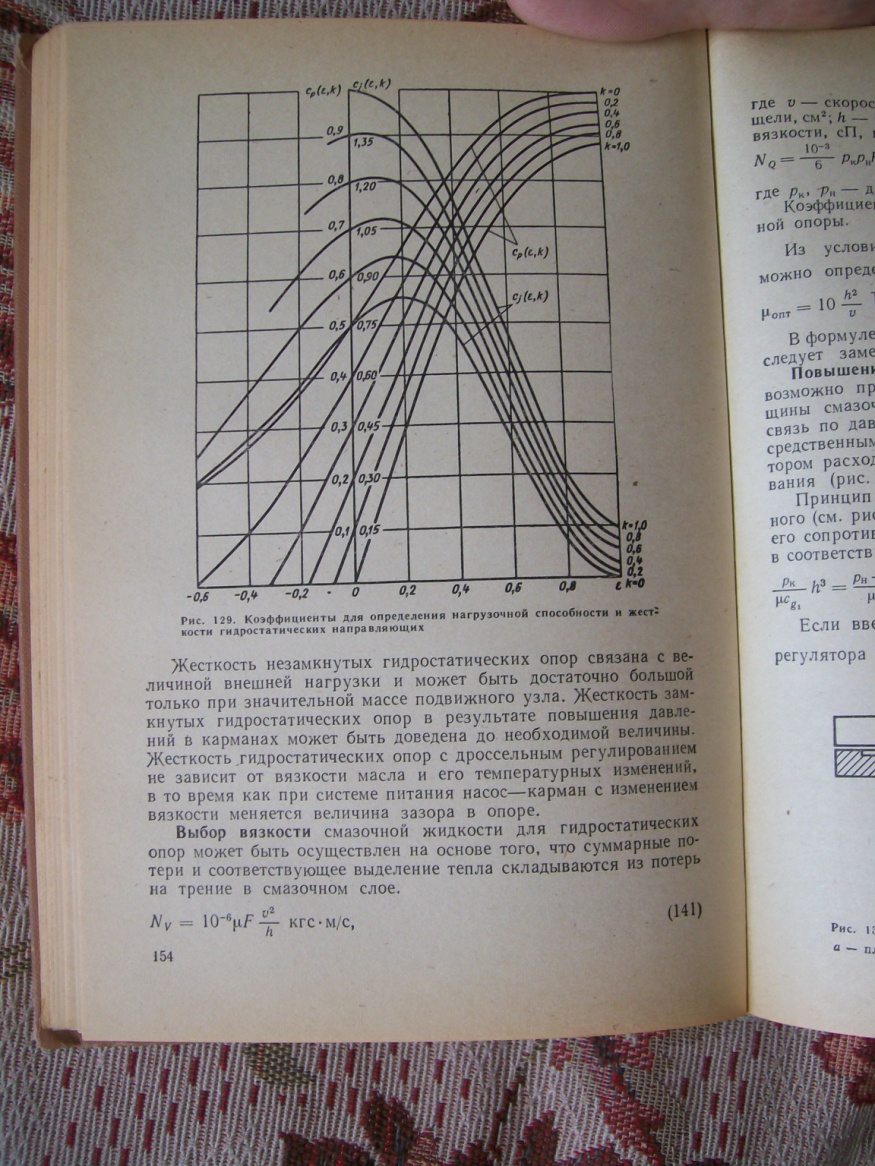
Замкнутая гидростатическая опора с дроссельным регулированием (рис. 128, г) обладает грузоподъемностью и жесткостью, определяемыми формулами (138) и (139), в которых коэффициенты ср (е, k) и су (е, k) берут по кривым рис. 129.
Сравнение характеристик всех гидростатических опор основных типов, приведенных на рис. 128, позволяет сделать следующие
выводы.
Жесткость незамкнутых гидростатических опор связана с величиной внешней нагрузки и может быть достаточно большой только при значительной массе подвижного узла. Жесткость замкнутых гидростатических опор в результате повышения давлений в карманах может быть доведена до необходимой величины. Жесткость гидростатических опор с дроссельным регулированием не зависит от вязкости масла и его температурных изменении. в то время как при системе питания насос—карман с изменением вязкости меняется величина зазора в опоре.
Выбор вязкости смазочной жидкости для гидростатических опор может быть осуществлен на основе того, что суммарные потерн и соответствующее выделение тепла складываются из потерь на тренне в смазочном слое.

где v — скорость относительного движения, м/с F-площадь щели, см2, h-толщина щели см, µ- динамический коэффициент вязкости, сП, и потерь на прокачивание масла:

где рк, р„ — давления в кармане и насосе нойКоОпЭо°*ь1ЦИеНТ С" С°°ТВетствУет Ф0Рмуле (130) для прямоуголь-
Из условия минимума суммарных затрат можно определить оптимальное значение вязкости

В формуле (143) при системе питания насос—карман давление рл следует заменить на рн.