

83 Синхронные электродвигатели. Особенности их использования в автоматизированном электроприводе.
У синхронных электрических машин ротор в установившемся режиме вращается с угловой скоростью вращающегося магнитного поля, создаваемого токами в фазных обмотках статора, подобного статору асинхронной машины. Это достигается тем, что ротор синхронной машины представляет собой обычно электромагнит или реже постоянный магнит с числом пар полюсов, равным числу пар полюсов вращающегося магнитного поля. Взаимодействие полюсов вращающегося магнитного поля и полюсов ротора обеспечивает постоянную частоту вращения последнего независимо от момента на валу. Это свойство синхронных машин позволяет применять их в качестве двигателей для привода механизмов с постоянной частотой вращения. Распространенность синхронных двигателей не столь широка, как асинхронных, но в ряде случаев они необходимы. Единичная мощность синхронного двигателя в приводах большой мощности достигает нескольких десятков мегаватт.
Устройство синхронной машины
Основными частями синхронной машины являются статор и ротор. Сердечник статора собран из изолированных друг от друга пластин электротехнической стали и укреплен внутри массивного корпуса. В пазах с внутренней стороны статора размещена в большинстве случаев трехфазная обмотка.
Ротор синхронной машины представляет собой электромагнит — явнополюсный (рис. 9.1, где 1 — полюсы; 2 — полюсные катушки; 3 — сердечник ротора; 4 — контактные кольца) или неявнополюсный (рис. 9.2, где 1— сердечник ротора; 2 — пазы с обмоткой; 3 — контактные кольца). Ток в обмотку ротора поступает через контактные кольца и щетки от внешнего источника постоянного тока — возбудителя.
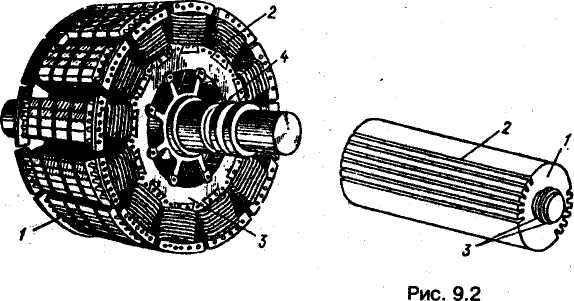
Рис. 9.1
Синхронные двигатели малой мощности
Свойство синхронных двигателей сохранять неизменной частоту вращения при изменении тормозного момента на валу достигается усложнением устройства ротора по сравнению с асинхронными: к обмотке подключается через скользящие контакты специальный источник постоянного тока.
В синхронных двигателях малой мощности роль вращающегося постоянного электромагнита выполняет постоянный магнит, изготовленный из магнитно-твердого материала и укрепленный на оси ротора. Пуск такого двигателя в ход осуществляется обычно непосредственным подключением его фазных обмоток статора к электрической сети. Для возникновения асинхронного момента при пуске двигателя в полюсах постоянного магнита располагаются стержни короткозамкнутой обмотки.
Другой разновидностью синхронных двигателей малой мощности являются так называемые синхронные реактивные двигатели. Особенность этих двигателей заключается в том, что их ротор имеет магнитную анизотропию, т. е. различное магнитное сопротивление в различных радиальных направлениях. На рис. 9.20 приведен поперечный разрез конструкции двухполюсного анизотропного ротора, представляющего собой набор пакетов из листовой электротехнической стали, разделенных слоями алюминия (заштрихованная часть). Продольное направление легкого намагничивания пакетов листовой электротехнической стали определяет форму магнитных линий поля токов статора. Искривление магнитных линий поля токов статора при наличии тормозного момента на валу двигателя создает вращающий момент, уравновешивающий тормозной момент.
К общим недостаткам синхронных двигателей малой мощности относится отсутствие возможности регулировать реактивную мощность и запас устойчивости.
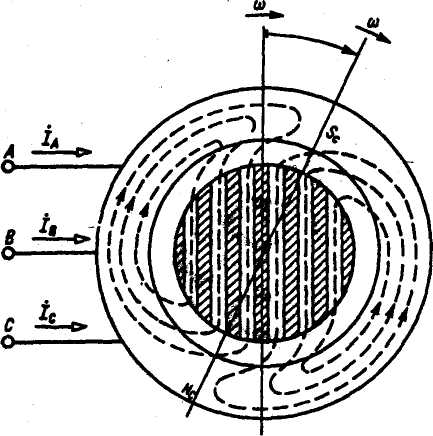
Рис. 9.20