

2. Derivative – обчислення похідної
Призначення: виконує чисельне диференціювання вхідного сигналу.
Параметри: ні.
Для обчислення похідної використовується наближена формула Ейлера:
![]()
де u – величина зміни вхідного сигналу за час t; t – поточне значення кроку часу моделювання.
Значення вхідного сигналу блоку до початку розрахунку вважається рівним нулю. Початкове значення вихідного сигналу також вважається рівним нулю.
Точність обчислення похідної істотно залежить від величини встановленого кроку розрахунку. Вибір меншого кроку розрахунку покращує точність обчислення похідної.
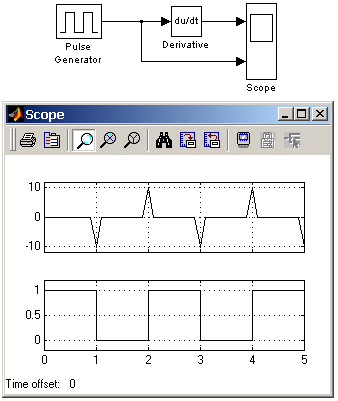
Мал.12. Приклад використання блоку Derivative для диференціювання сигналу.
Даний блок використовується для диференціювання аналогових сигналів. При диференціюванні дискретного сигналу за допомогою блоку Derivative його вихідний сигнал буде послідовністю імпульсів, які відповідні моментам часу стрибкоподібної зміни дискретного сигналу.
3. Lntegrator – інтегруючий блок
Призначення: виконує інтегрування вхідного сигналу.
Параметри:
External reset – зовнішнє скидання. Тип зовнішнього управляючого сигналу, що забезпечує скидання інтегратора до початкового стану. Вибирається із списку:
none – немає (скидання не виконується)
rising – наростаючий сигнал (передній фронт сигналу)
falling – спадаючий сигнал (задній фронт сигналу)
either – наростаючий або спадаючий сигнал
level – не нульовий сигнал (скидання виконується якщо сигнал на управляючому вході стає не рівним нулю);
В тому випадку, якщо вибраний який-небудь (але не none), тип управляючого сигналу, то на зображенні блоку з’являється додатковий управляючий вхід. Поряд з додатковим входом буде показано умовне позначення управляючого сигналу.
Initial condition source – джерело початкового значення вихідного сигналу. Вибирається із списку:
internal – внутрішній
external – зовнішній. В цьому випадку на зображенні блоку з'являється додатковий вхід, позначений x0, на який необхідно подати сигнал задаючий початкове значення вихідного сигналу інтегратора.
Initial condition – початкова умова. Установка початкового значення вихідного сигналу інтегратора. Параметр доступний, якщо вибрано внутрішнє джерело початкового значення вихідного сигналу.
Limit output (прапорець) – використання обмеження вихідного сигналу.
Upper saturation limit – верхній рівень обмеження вихідного сигналу. Може бути заданий як числом, так і символьною послідовністю inf, тобто + .
Lower saturation limit – нижній рівень обмеження вихідного сигналу. Може бути заданий як числом, так і символьною послідовністю inf, тобто - .
Show saturation роrt – управляє відображенням порту, що виводить сигнал, що свідчить про вихід інтегратора на обмеження. Вихідний сигнал даного порту може приймати наступні значення:
0, якщо інтегратор не знаходиться на обмеженні.
+1, якщо вихідний сигнал інтегратора досяг верхньої обмежуючої межі.
-1, якщо вихідний сигнал інтегратора досяг нижньої обмежуючої межі.
Show state роrt (галочка) – відобразити/скрити порт стану блоку. Даний порт використовується в тому випадку, якщо вихідний сигнал інтегратора вимагається подати як сигнал зворотного зв’язку цього ж інтегратора. На приклад, при установці початкових умов через зовнішній порт або при скиданні інтегратора через порт скидання. Вихідний сигнал з цього порту може використовуватися також для організації взаємодії з керованою підсистемою.
Absolute tolerance – абсолютна погрішність.
На мал.3 показано приклад роботи інтегратора при подачі на його вхід сходинкового сигналу. Початкова умова прийнята рівною нулю.
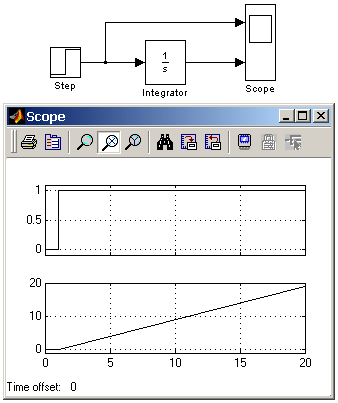
Мал.13. Приклад роботи інтегратора при подачі на його вхід сходинкового сигналу. Початкова умова прийнята рівною нулю.