

Н ИЖЕГОРОДСКИЙ
ГОСУДАРСТВЕННЫЙ
ИЖЕГОРОДСКИЙ
ГОСУДАРСТВЕННЫЙ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ
Факультет ФАЭ .
Кафедра ЭПА .
Группа 97- .
Дата защиты “ “ 2000 г.
НИЖЕГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ

Кафедра Электропривод и автоматизация промышленных установок
Заведующий кафедрой
.
(подпись) (фамилия, и., о.)
.
(дата)
Стабилизированный источник питания
(наименование темы проекта или работы)
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе
(вид документа)
Руководитель
Шахов А.В.
(подпись) (фамилия, и., о.)
(дата)
Студент
.
(подпись) (фамилия, и., о.)
(дата) 97-ЭА .
(группа или шифр)
Работа защищена (дата)
Протокол № .
С оценкой .
2000 г.
Содержание

Постановка задачи 2
Принцип построения, функциональная схема, работа
системы при изменениях задающего и возмущающих
воздействий. 7
Линеаризация уравнений преобразователя и
сглаживающего фильтра для малых отклонений
от номинального режима. 9
Структурная схема САР. 11
Передаточные функции системы. 14
Определение установившейся ошибки системы. 15
Коэффициенты усиления усилителя и разомкнутой
системы. 16
Логарифмические амплитудные и частотные
характеристики. 17
Синтез корректирующего устройства. 19
Расчет переходных процессов. 22
Литература 29
КР – НГТУ – 1806 - (97-ЭА) – 1-8-00
Изм Лист № докум. Подпись Дата
Разраб. . Лит. Лист Листов
Пров. Шахов А.В. Пояснительная записка 2 29
к курсовой работе
Н.Контр
Утв.
Постановка задачи
Источник предназначен для питания электрической нагрузки (Н) стабилизированным напряжением постоянного тока независимо от колебаний напряжения питающей сети и изменения сопротивления нагрузки. Источник содержит (рис.1) полупроводниковый преобразователь (II), выходной сглаживающий фильтр (Ф); усилитель (У), датчик выходного напряжения (ДН), задающий потенциометр (ЗП).
Уравнения динамики элементов системы записываются следующим образом:
а) датчик напряжения
![]()
б) сравнивающее устройство
![]()
в) усилитель
![]()
г) преобразователь

д) выходной сглаживающий фильтр

где UЗ(t), UДН(t), UУ(t), UП(t) - выходные напряжения задающего устройства, датчика напряжения, усилителя и преобразователя, соответственно;
UP(t) - напряжение рассогласования;
UC(t) - напряжение питающей сети;
U(t) – напряжение на нагрузке;
R(t) - сопротивление нагрузки;
kДН, kУ, kП - коэффициенты передачи соответственно датчика напряжения, усилителя, преобразователя;
TДН, ТП - постоянные времени датчика напряжения и преобразователя;
RП - эквивалентное внутреннее сопротивление преобразователя;
LФ, СФ – индуктивность и емкость сглаживающего фильтра.
Численные значения параметров уравнений определяются по данным таблицы.
Задание
Определить принцип построения системы. Составить функциональную схему и показать ее взаимосвязь с принципиальной схемой. Дать краткое описание работы системы при изменениях задающего и возмущающих воздействий.
Составить линеаризованные уравнения преобразователя и сглаживающего фильтра для малых отклонений от номинального режима. Определить неизвестные параметры по уравнениям статики в номинальном режиме.
Записать дифференциальные уравнения звеньев системы в отклонениях и затем в операторной форме при нулевых начальных условиях. Найти передаточные функции звеньев, составить структурную схему системы (структурную схему привести к одноконтурному виду с единичной обратной связью).
Определить по структурной схеме передаточную функцию разомкнутой системы и шесть передаточных функций замкнутой системы: для регулируемой величины и для ошибки по задающему напряжению, сопротивлению нагрузки и по напряжению питающей сети.
Используя операторные уравнения замкнутой системы для регулируемой величины и ошибки, определить, является система статической или астатической.
Определить требуемый коэффициент усиления разомкнутой системы (К) и усилителя (КУ) по заданным значениям отклонений напряжения сети (UC), сопротивления нагрузки (R) и соответствующей величине отклонения напряжения на нагрузке (U) в замкнутой системе.
Построить логарифмические амплитудную и фазовую частотные характеристики разомкнутой системы. Проанализировать устойчивость замкнутой системы по виду JIAЧX и ЛФЧХ.
Выполнить синтез корректирующего устройства методом логарифмических частотных характеристик по заданным времени регулирования (tP) по задающему воздействию и величине перерегулирования (), не превышающей 20%. Выбрать место включения, схему и рассчитать параметры корректирующего устройства.
Рассчитать переходные процессы изменения регулируемой величины в скорректированной системе при ступенчатом изменении задающего воздействия UЗ = 1 B, а также ступенчатом изменении сопротивления нагрузки (нечетные номера вариантов задания) и напряжения питающей сети UC (четные номера вариантов) на величины, указанные в таблице. Проверить систему на соответствие требованиям задания.
Примечание: пункт задания 6 выполняется при условии одновременного отклонения напряжения сети и сопротивления нагрузки.
Таблица 1
TП |
СФ |
LФ |
U`УН |
ТДН |
UСН |
КДН |
RП |
R |
UC |
U |
UH |
IH |
tP |
с |
мкФ |
Гн |
B |
с |
В |
|
Oм |
Ом |
В |
В |
B |
A |
c |
0,01 |
5000 |
0,50 |
11,0 |
0,0005 |
380 |
0,02 |
0,25 |
1,0 |
90 |
2,5 |
440 |
200 |
1,2 |
UУН’, UСН, UH, IH – значения соответствующих переменных в номинальном режиме.
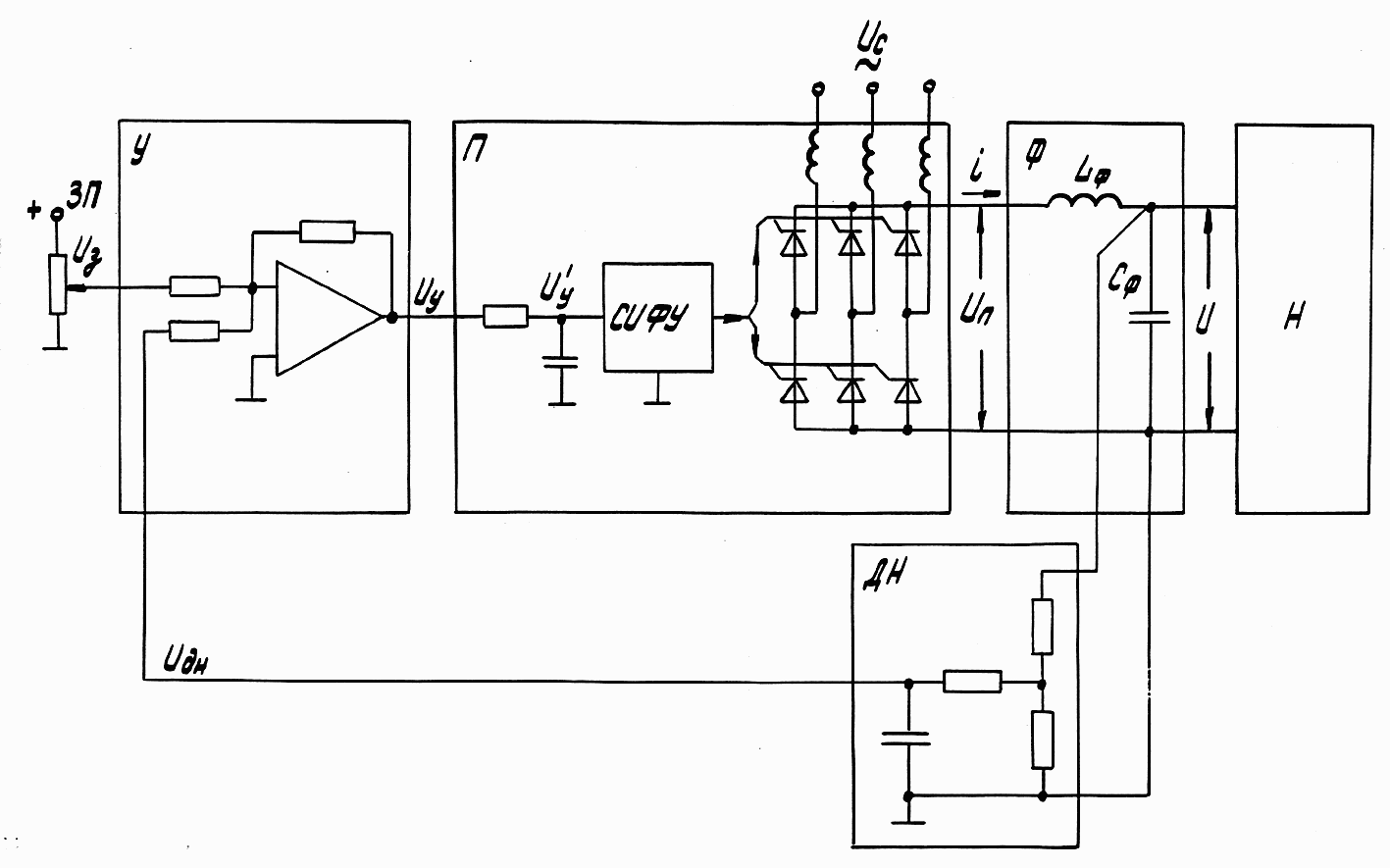
Рис. 1. Стабилизированный источник питания.
Принцип построения, функциональная схема, работа системы при изменениях задающего и возмущающих воздействий.
Функциональная схема системы автоматического регулирования.
Построим функциональную схему исходя из следующего:
Регулируемой величиной является напряжение на нагрузке.
Управляющим воздействием является напряжение Uy, приложенное ко входу преобразователя.
Объект регулирования должен быть расположен между точкой приложения управляющего воздействия и регулируемой величиной.
В данной системе объектом регулирования является преобразователь с выходным сглаживающим фильтром. Кроме объекта регулирования, в системе есть автоматический регулятор, состоящий из задающего потенциометра (ЗП), усилителя (У) и датчика напряжения (ДН), включенного в обратную связь по регулируемой величине. К объекту регулирования приложены возмущающие воздействия: напряжение сети Uc и сопротивление нагрузки R.

UC R
UЗ UP UУ U
У ОР
ДН
Рис. 2. Функциональная схема САР.
Принцип построения САР.
Из функциональной схемы видно, что в данной системе имеется отрицательная обратная связь по регулируемой величине, следовательно, в данной системе используется принцип регулирования по отклонению.
Работа системы при изменениях задающего и возмущающих воздействий.
При увеличении UЗ в сравнивающем устройстве увеличивается напряжение рассогласования, что ведет к увеличению напряжения UУ. Это увеличивает напряжение U и, следовательно, напряжение UДН. В результате увеличения UДН напряжение рассогласования уменьшается до первоначального значения, система стабилизируется.
При увеличении UС увеличивается напряжение на нагрузке U и напряжение на датчике UДН. В результате уменьшается напряжение рассогласования, уменьшается UУ, что компенсирует увеличение напряжения UC.
Увеличение сопротивления нагрузки R приведет к уменьшению тока в фильтре i, увеличению напряжения на входе преобразователя и на нагрузке. Напряжение UУ уменьшится, система стабилизируется.
Линеаризация уравнений преобразователя и сглаживающего фильтра для малых отклонений от номинального режима.
Уравнения преобразователя и сглаживающего фильтра имеют вид:
![]() (2.1)
(2.1)
![]() (2.2)
(2.2)
![]() (2.3)
(2.3)
![]() (2.4)
(2.4)
Для определения неизвестных параметров запишем уравнения (2.1) – (2.4) в номинальном режиме:
![]() (2.5)
(2.5) ![]() (2.6)
(2.6) ![]() (2.7)
(2.7)
![]() (2.8)
(2.8)
Находим параметры системы:
UУ = 11 В, UП = 440 В.
![]()
![]()
Формула линеаризации нелинейных уравнений для малых отклонений от номинального режима имеет вид:
![]()
![]() , (2.9)
, (2.9)
где
![]() ,
,
![]() ,
,
![]() - значения производных функции f(x,
y, z) по соответствующим координатам
в номинальном режиме, x
= x - xн, y
= y - yн,
- значения производных функции f(x,
y, z) по соответствующим координатам
в номинальном режиме, x
= x - xн, y
= y - yн,
z = z - zн – отклонения соответствующих координат от номинального режима.
Линеаризуя уравнения (2.1) – (2.4), получим:
![]() (2.10)
(2.10)
![]() (2.11)
(2.11)
![]() (2.12)
(2.12)
![]() (2.13)
(2.13)
Структурная схема сар.
Уравнения системы в операторной форме.
Уравнения звеньев системы для малых отклонений от номинального режима:
![]() (3.1)
(3.1)
![]() (3.2)
(3.2)
![]() (3.3)
(3.3)
(3.4)
(3.5)
(3.6)
(3.7)
Перейдем к уравнениям по Лапласа при нулевых начальных условиях:
![]() (3.8)
(3.8)
![]() (3.9)
(3.9)
![]() (3.10)
(3.10)
![]() (3.11)
(3.11)
![]() (3.12)
(3.12)
![]() (3.13)
(3.13)
![]() (3.14)
(3.14)
Преобразовав выражения, получим:
 (3.15)
(3.15)
![]() (3.16)
(3.16)
Введем условные обозначения коэффициентов усиления и постоянных времени:
k1 = kПUСН = 0.12380 = 45,6.
k2 = kПU`УН = 0.1211 = 1,32.
![]()
T3 = CФRН; T3 = 500010-62,2 = 0,011 c.

![]() c.
c.
![]() .
.
![]() .
.
Запишем операторные уравнения с учетом введенных коэффициентов:
![]() ; (3.17)
; (3.17)
(3.18)
![]() ; (3.19)
; (3.19)
![]() (3.20)
(3.20)
![]() (3.21)
(3.21)
![]() (3.22)
(3.22)
Передаточные функции звеньев.
Запишем уравнения (3.17) – (3.22) как
![]() ; (3.23)
; (3.23)
![]() (3.24)
(3.24)
; (3.25)
![]() (3.26)
(3.26)
![]() (3.27)
(3.27)
![]() (3.28)
(3.28)
Таким образом, имеем
![]() (3.29)
(3.29)
![]() (3.30)
(3.30)
![]() ; (3.31)
; (3.31)
![]() (3.32)
(3.32)
![]() (3.33)
(3.33)