

15.3 Порядок виконання роботи
1 Зберіть пристрій для виконання мікронівелювання радіальним методом.
2 Відрегулюйте довжини опорних і робочої штанги приладу так, щоб при встановленні, центр приладу співпадав з центром деталі.
3 Встановіть прилад в робоче положення, добийтесь відліків близьких до 0’’ при встановлені робочої штанги на опорні точки.
4 Запишіть відліки індикатора електронного рівня при встановлені робочої штанги на опорні точки.
5 Повторіть мікронівелювання опорних точок в оберненому порядку.
6 Визначіть перевищення між опорними точками, користуючись формулою (15.2).
7 Оцініть точність виконаних Вами вимірів перевищень за різницею подвійних вимірів dd, користуючись формулою
M=√ [ dd ] / 2n.
8 З використанням можливостей електронних таблиць Excel складіть таблицю результатів електронного мікронівелювання та профіль досліджуваної деталі. Приклад наведено на рисунку 15.2
15.4 Контрольні запитання для самопідготовки та захисту роботи
1 Коли доцільно використовувати метод мікронівелювання ?
2 За допомогою яких приладів можна виконати мікронівелювання ?
3 Які методи мікронівелювання ви знаєте ?
4 В чому суть окружного методу мікронівелювання ?
5 В чому суть радіального методу мікронівелювання ?
Лабораторна робота № 16 використання датчика вертикалі дв-2 для автоматизації спостережень за кренами споруд. Вивчення будови і конструктивних особливостей датчика.
16.1 Загальні положення
Датчик вертикалі ДВ-2 призначений для вимірювання змін відхилень від вертикалі конструкцій будівель, споруд та накопичення результатів вимірів[6]. Датчик відповідає температурному режиму (кліматичне виконання УХЛ) для категорії 3.1. за ГОСТ 15150-69 для експлуатації при температурі навколишнього середовища від мінус 30 градусів до плюс 50 градусів С. Пульт керування відповідає температурному режиму (УХЛ).
До складу датчика ДВ-00-00-000 входять блок вимірювача ДВ-01-00-000, пульт керування ПДС-01 ААГЩ 421415. платформа, на яку прикріплений блок вимірювача і два кабеля: кабель Д для зв’язку пульта з блоком вимірювача і кабель К для зв’язку пульта з комп’ютером. Платформа з блоком вимірювача ставиться твердо на об’єкт, який контролюється. Пульт ПДС-01 за допомогою рознімання підключають до блоку вимірювача тільки в момент знімання інформації або програмування його роботи. За вимогою замовника можлива поставка виробником декількох платформ з блоками вимірювачів і одного пульта ПДС-01.
Габаритні розміри, мм, не більше :
платформа з блоком вимірювача 210 х 180 х 130
пульт керування ПДС-01 45 х 80 х 38
Маса, кг, не більше:
платформа з блоком вимірювача 3
пульт керування ПДС-01 0,5
Поточний ремонт датчика протягом періоду гарантійного терміну експлуатації і всі наступні можливі ремонти виконує тільки підприємство-виробник, тому ЗИП в комплект поставки не входить.
Таблиця 16.1 - Технічні характеристики ДВ-2
Діапазон вимірювання кутів в двох площинах, мін ±30 |
Межа чутливості, с, не більше 3 |
Допустиме середнє квадратичне відхилення виміру кута, с, не більше: - в діапазоні кутів +/- ( 0 – 10 ) мін ± 5 - в діапазоні кутів +/- ( 10-30 ) мін ±10 |
Максимальна кількість вимірів,які записуються під час автономної роботи ( при моніторингу ) 16319 |
Інтервали часу між двома сусідніми вимірами при моніторингу: 5 с, 10 с, 30 с 1 хв, 5 хв, 10 хв, 30 хв 1 год, 6 год, 12 год, 24 год безперервно з частотою 4 Гц |
Джерела живлення датчика - блока вимірювача – елементи живлення типу Д 1,.5 В 2 шт. - пульта керування ПДС-01 – елемент живлення типу «Крона» 9 В 1 шт. |
Тривалість роботи блока вимірювача від вбудованого джерела живлення без його заміни, годин не менше : - при моніторингу з інтервалом 5 с 600 - при моніторингу з інтервалом 30 с 3600 - при моніторингу з інтервалом 1 хв 7200 - при моніторингу з інтервалом більше 1 хв 14400 |
Примітка. Тривалість роботи наведена для елементів живлення, які мають ємкість 7,6 А (наприклад, Super Alkaline фірми GP) і пропорційна ємкості конкретно встановлених елементів живлення .
Принцип роботи датчика ґрунтується на вимірюванні величини відхилення корпусу датчика, який скріплений з контрольованим об’єктом від
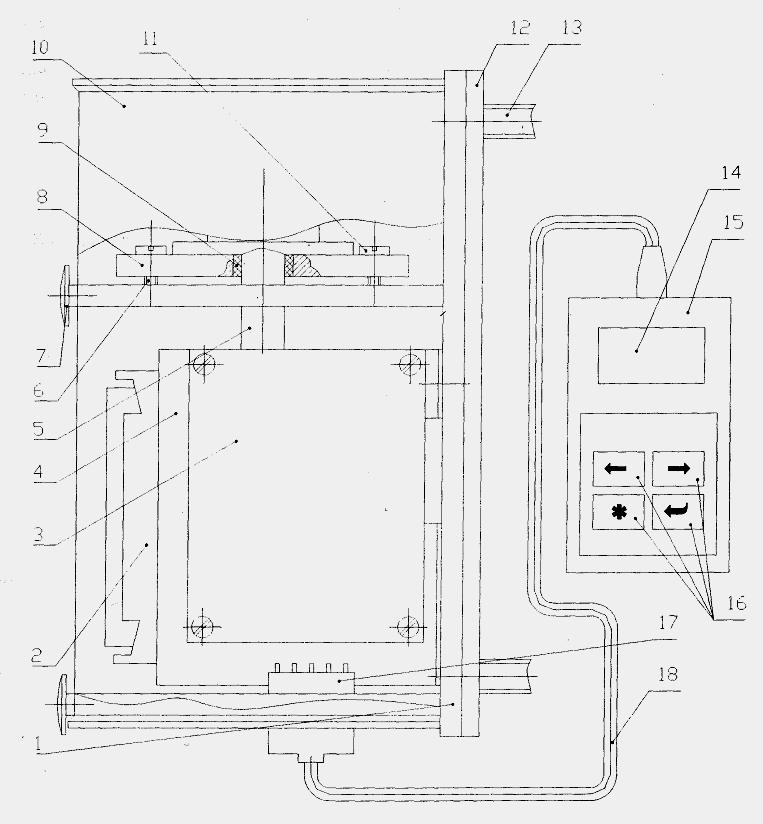
Рисунок 16.1 – Датчик вертикалі ДВ-2
вертикального положення. Вимірювання виконуються за допомогою перетворювача кута нахилу ПН-4, який складається з симетричної відносно осі обертання металічної ампули наповненої електролітом з п’ятьома електричними виходами в вигляді штирів, один з яких з’єднаний з корпусом.
Маркування датчика виконана на шильдах, які скріплені на платформі з блоком вимірювача і на пульті ПДС-01 .
Маркування включає :
- найменування виробу;
- найменування підприємства – виробника;
- заводський номер виробу і дата виготовлення.
Датчик у відповідності до рисунка 1 складається з кронштейну 1, кожуха 10, платформи 12 з анкерами 13 і пульта керування ПДС-01 15, який підключається до розняття 17 датчика за допомогою кабеля 18. На кронштейні 1 знаходяться: стінка 4, на якій кріпиться плата 3 і елементи живлення 2, розняття 17, корпус 8 з перетворювачем кута нахилу 5, який ізольований від корпуса 9. Корпус 8 з перетворювачем кута нахилу 5 закріплений до кронштейну 1 гвинтами 11, юстування вертикального положення перетворювача виконується гвинтами 6. Кожух 10 закріплений до кронштейну 1 гвинтами 7. Кронштейн 1 закріплений до платформи 12 за допомогою чотирьох гвинтів при знятому кожусі 10 після установки платформи на контрольований об’єкт з точністю відхилення платформи від вертикалі не більше 5 . Плата 3 призначена для зчитування із перетворювача кута нахилу 5 сигналів про відхилення від вертикалі, перетворення цих сигналів в цифрову форму і накопичення їх в пам’яті обладнання, яке знаходиться на платі. На платі є також годинник реального часу і обладнання для зв’язку з пультом ПДС-01 або з комп’ютером за інтерфейсом RS485.
Пульт ПДС-01 15 призначений для зняття інформації з блоку вимірювача, обробки отриманої інформації, видачі одержаних даних в кутових величинах ( мін, с ) на рідинний кристалічний індикатор і запису цих даних в пам’ять енергонезалежного обладнання з метою переносу на комп’ютер, а також для забезпечення необхідних функцій контролю і керування.
Всередині корпусу пульта знаходяться:
рідинний кристалічний індикатор ( РКІ );
мікроконтролер керування і обробки інформації;
модуль виводу інформації на РКІ;
клавіатура з чотирма кнопками керування : “←“, “↓“, “ Enter”, “Esc”;
елемент живлення типу «Крона» 9 В.
Пульт підключається до блоку вимірювача з’єднувальним кабелем 18 до розняття 17. Фізичний канал передачі інформації – RS485.