

14.3 Завдання для виконання
1 Виконати передачу даних вимірів лазерним віддалеміром Leica DISTO™ plus на РС:
а)- інсталювати ПЗ Bluetooth для РС:
б) - налагодити параметри Bluetooth для РС;
в) - додати пристрій Bluetooth лазерного віддалеміра Leica DISTO™ plus в пристрої РС;
г)- виконати передачу даних вимірів лазерним віддалеміром Leica DISTO™ plus на РС за допомогою програми PlusXL.
2 Виконати передачу даних вимірів лазерним віддалеміром Leica DISTO™ plus на кишеньковий РС( типу PocketPC)/
3 Виконати передачу даних вимірів лазерним віддалеміром Leica DISTO™ plus на мобільний телефон.
4 Привести лістинг файлів обміну.
14.4 Контрольні запитання для самопідготовки та захисту роботи
1 За допомогою якого пристрою здійснюється дистанційна передача даних ?
2 На якій відстані працює дистанційна передача даних з електронної рулетки?
3 На які пристрої можливо виконати дистанційну передачу даних з електронної рулетки ?
4 Опишіть загальний порядок дій при дистанційній передачі даних ?
5 Як встановити програмне забезпечення для дистанційної передачі даних на комп’ютер ?
6 В якому форматі передаються дані з електронної рулетки на комп’ютер?
7 В якій папці на комп’ютері записуються дані вимірів електронної рулетки при дистанційній передачі ?
Лабораторна робота № 15 метод електронного мiкронiвелювання
15.1 Мета роботи: Освоїти радіальний метод мікронівелювання технологічного обладнання.
15.2 Основні відомості:
Робота більшості найважливішого технологічного обладнання допускається лише при дотриманні певних геометричних умов до положення його осей під час експлуатацii. Наприклад, при експлуатації АЕС це вiдноситься в першу чергу до реакторної установки (РУ) i головних центробiжних насосiв (ГЦН-195-М), експлуатацiя яких допускається тiльки за умови, що вiдхилення їх осей вiд вертикалi не перевищуе 1/1000. Перевiрка виконання цiєї умови виконується шляхом нiвелювання торцiв опорних фланцiв головних розйомiв РУ i ГЦН при прийомцi в експлуатацiю пiсля монтажних робiт i регулярно раз в рiк пiд час планово-профiлактичного ремонту.
Оскiльки точнiсть вимiрiв, яка вимагаеться при цьому, є практично граничною для геометричного нiвелювання коротким променем, то при прийманні РУ i ГЦН з монтажу в експлуатацiю, пiсля ремонтних робiт зв’язаних з шліфуванням поверхні фланця, коли додатково необхідно перевірити його площинність, а також в тих випадках, коли крен обладнання близький до граничних величин, доцільно виконувати цю роботу більш точним методом мiкронiвелювання [1]. Для цiєi мети на кафедрі інженерної геодезії ІФНТУНГ розроблена i рекомендується методика з використанням електронного рівня моделі 128 виробництва заводу "Калiбр", м. Москва, або аналогічних. Цi ж прилади рекомендуються i при визначеннi прогинів валів насосiв, яка вимагається при проведені ремонту , а також при розробці карт технології ремонту
Для нiвелювання торцiв фланцiв РУ рекомендується окружний метод [1]. Чистота обробки i зачистки поверхні фланця така, що при нiвелюваннi є можливість встановлювати перетворювач рівня безпосередньо на опорну поверхню фланця в послiдовнi положення 1-84 . В кожному з цих

Рисунок 15.1 - Прилад для електронного мікронівелювання радіальним методом.
положень беруться вiдлiки два рази з перестановкою датчика на 180 . При правильній роботі i якiснiй зачистці поверхні фланця розходження в алгебраїчних сумах цих двох вiдлiкiв не перевищують 5". Висоти всіх точок обчислюють за формулою:
H = H + i" d/ " , ( 15.1 )
де i" - середнє значення з показів індикатора в положеннях, що вiдрiзняються на 1800;

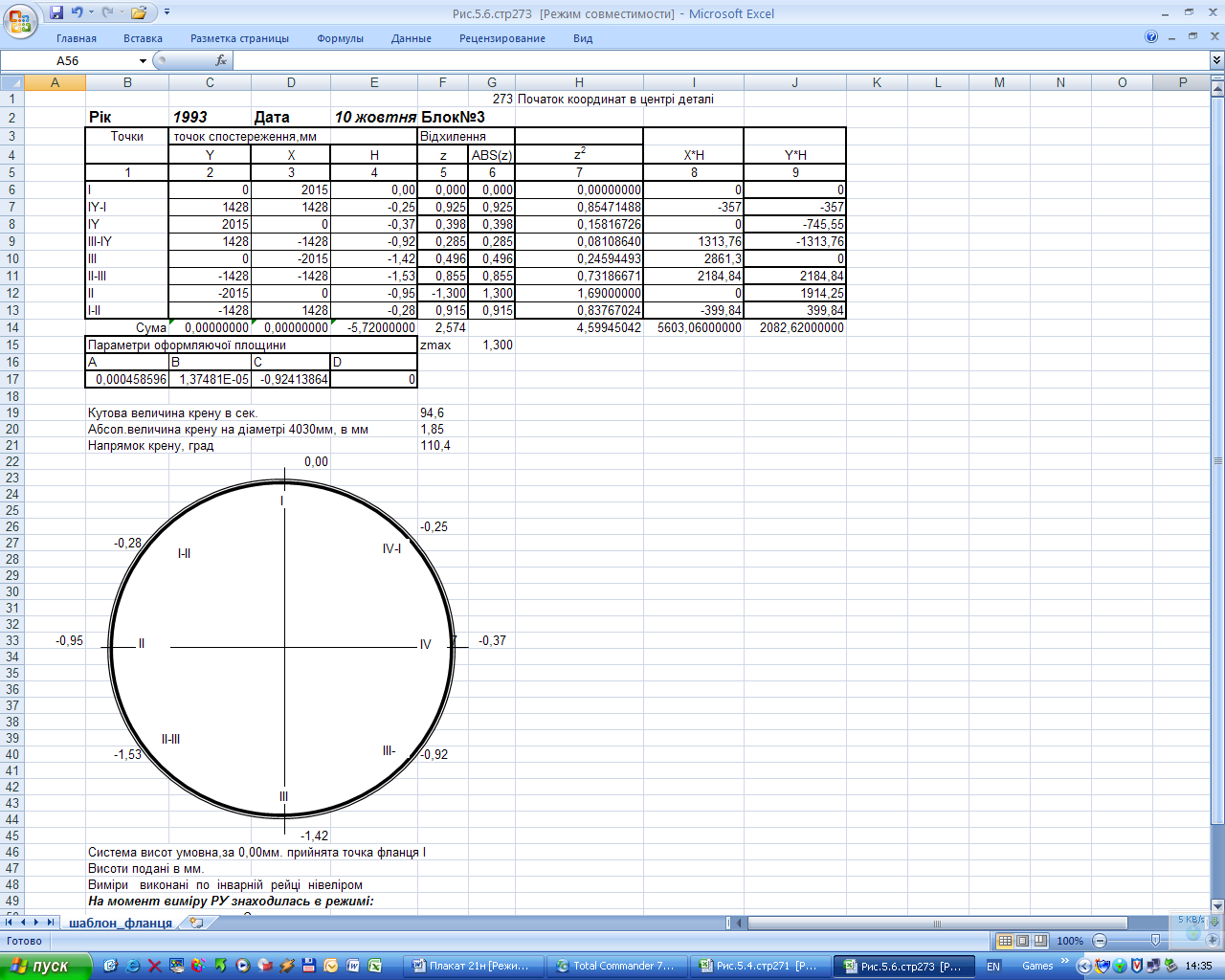
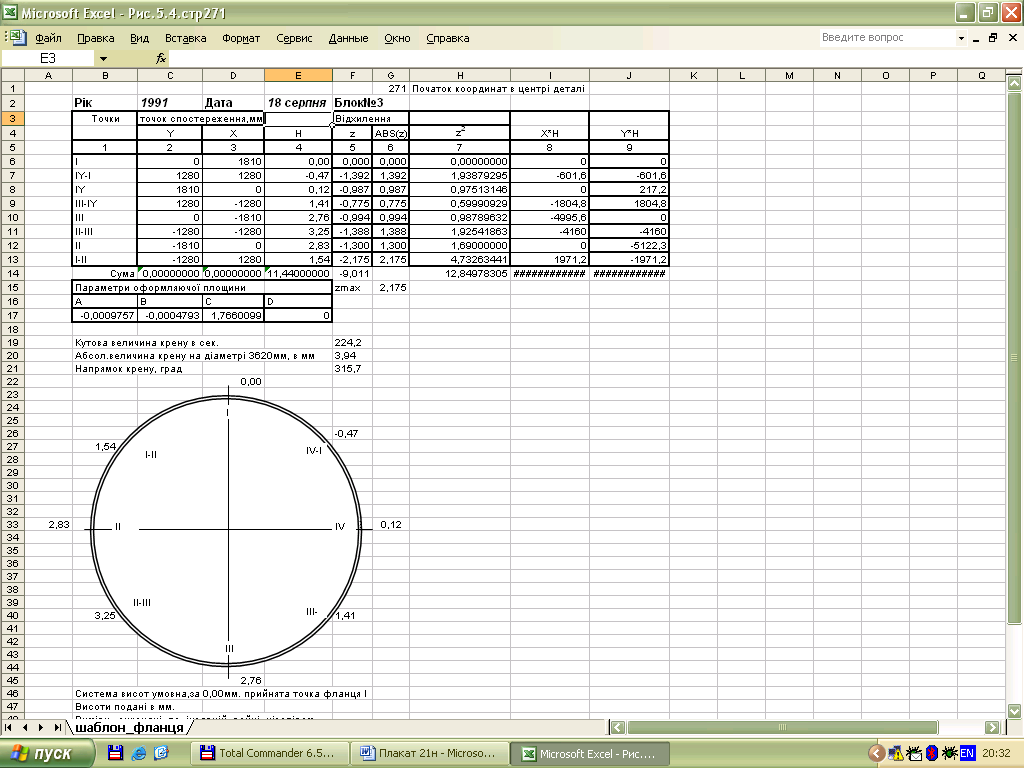
Рисунок 15.2 – Приклади звітної документації за результатами електронного мікронівелювання.
d - база датчика-150мм.
Як показали результати вимірів, нев'язки ходів не перевищували 0,05 мм при допустимих на порядок більших.
При визначеннi горизонтальності i площинності торця опорного фланця головного розняття ГЦН-195-М рекомендується радіальний метод мiкронiвелювання [1], для якого розроблено спеціальний пристрій. Це зв’язано з тим, що опорна площадка фланця має ширину 15 мм, що утруднює безпосереднє встановлення датчика на неї, як при окружному методі.
Сконструйований пристрій має такі особливості (див. рис 15.1):
1 Використовується датчик-перетворювач-1 i реєструю чий прилад-2 електронного рівня моделі 128.
2 Опорна площадка-10 при мiкронiвелюваннi встановлюється в центрі фланця при допомозі штанг-3 довжина яких регулюється гвинтами-5.
3 В центрі опорної площадки е заглиблення, шліфоване дно якого розміщене на однаковій висоті з опорами-4 подвижник штанг-3. В це заглиблення при роботі встановлюється подвижний штифт індикатора часового типу (IЧТ)-7, або опорний гвинт-9 подвижної штанги-6, до якої кріпиться датчик-1 електронного рівня.
4 В конструкцію введений додатковий гвинт-8, що опирається на опорну площадку-10 i може зманювати кут нахилу подвижної штанги-6 в робочому положенні. Може міняти свою довжину i опорний гвинт-9.
5 При мiкронiвелюваннi торця опорного фланця ГЦН-195-М штанги-3 встановлюються на торець фланця опорами-4 i опорна площадка-10 виставляється по центру фланця за допомогою регулюючих гвинтiв-5 Враховуючи обмежений час перебування всередині ГЦН, рекомендується виставити довжини штанг-3 наперед, для чого використовується зйомна прокладка на яку опирається виїмна частина ГЦН. Знявши цю прокладку, або використовуючи запасну, можна в спокійних умовах, майстерня, відрегулювати довжини штанг -3 і подвижної робочої штанги мiкронiвелiра-6.
6 Після того, як опорна площадка встановлена в центрі фланця, встановлюється робоча штанга в положення зображене на рис 15.1, коли штифт IЧТ встановлений в центральному заглибленні опорної площадки-10, а штифт-9 на торцю головного розняття ГЦН.
7 Міняючи довжину гвинта-9, добиваються вiдлiкiв по індикатору електронного рівня близьких до 0". Опорний гвинт-8 перед цим викручується так,щоб він не торкався площадки-10.
8 Далi робоча штанга встановлюється послідовно напроти кожної з шпильок на торець фланця i беруться вiдлiки по індикатору електронного рівня в положеннях 1-30 (див. рис 15.2). Перевищення мiж точками 1-30-1 вираховують за формулою
h =(v -v)*d/ ρ , (15.2 )
де v ,v -вiдлiки по індикатору електронного рівня в точках n i n+1 d - довжина штанги - 6 в робочому положенні( для ГЦН-195-М вона рівна 560 мм.)
Як показує досвід, це найшвидший варіант мiкронiвелювання. Час мiкронiвелювання фланця при цьому не перевищуе 15 хв.
Можливий i інший варіант роботи. Він полягає в тому, що при роботі ми в кожному з 30 положень робочої штанги опорним гвинтом -8 встановлюємо вiдлiк по індикатору електронного рівня -2 рівний 0" i пiсля цього беремо вiдлiки по IЧТ-7.В цьому випадку перевищення мiж точками мiкронiвелювання дорівнює безпосередньо рiзницi вiдлiкiв по IЧТ в них .
Як i при окружному методі, при аналiзi точності інструментальними похибками ми можемо нехтувати. Точність залежить в основному вiд якості зачистки фланця,та точності встановлення робочої штанги в потрібне положення. За результатами математичного опрацювання матерiалiв вимiрiв точнiсть визначення перевищень характеризується середньою квадратичною похибкою рівною:
m = 5"*d/ ρ (15.3 )