

Уфимский институт автоматики и электромеханики
Методические указания по проведению
лабораторной работы
"Исследование процессов
автоматизированного пуска и торможения
двигателя постоянного тока
с независимым возбуждением"
Приложение к стенду САФВ-2
Только для резидентов Российской Федерации.
Нет никаких ограничений на публикацию, размножение и переработку данных методических указаний. При перепечатках методических указаний ссылка на авторство УИАиЭ не обязательна.
![]() Все права
зарезервированы для нерезидентов РФ
(включая государства СНГ).
Все права
зарезервированы для нерезидентов РФ
(включая государства СНГ).
1 .Цель работы
Освоение методик экспериментального определения момента инерции. Изучение методов автоматизированного пуска и динамического торможения ДПТ с НИ, освоение методики расчета параметров схемы пуска и торможения.
2. Приборы и оборудование
Лабораторный стенд САФВ-2 в составе электромеханического агрегата на базе двигателя 1ПИ12.11-11-202М и приборного блока.
3. Основные технические данные двигателя 1пи12.11-11-202м
Исполнительный двигатель 1ПИ12.11-11-202М со встроенным тахогенератором представляет собой реверсивный высокомоментный двигатель постоянного тока с возбуждением от постоянных магнитов.
Напряжение питания, В 60
Потребляемый ток, А < 1
Номинальная частота вращения, мин 1000
Номинальный момент, Нм 4.7
Коэффициент Сс при п«1000 мин"1 ,Вс/рад > 42.4
4. Теоретические сведения
Во многих отраслях промышленности получили распространение электроприводы с питанием двигателя непосредственно от сети постоянного тока.
Простейшая система управления электроприводом должна включать в себя подсистему управления пуском двигателя и подсистему управления торможением двигателя. Наиболее простым в схемотехническом отношении и достаточно экономичным видом торможения является широко применяемое в технике динамическое торможение.
Особенностью ДПТ является то, что в целом ряде случаев прямое подключение обмотки якоря (ОЯ) ДПТ к питающей сети и шунтирование накоротко ОЯ при динамическом торможении недопустимо из-за больших пусковых и тормозных токов.
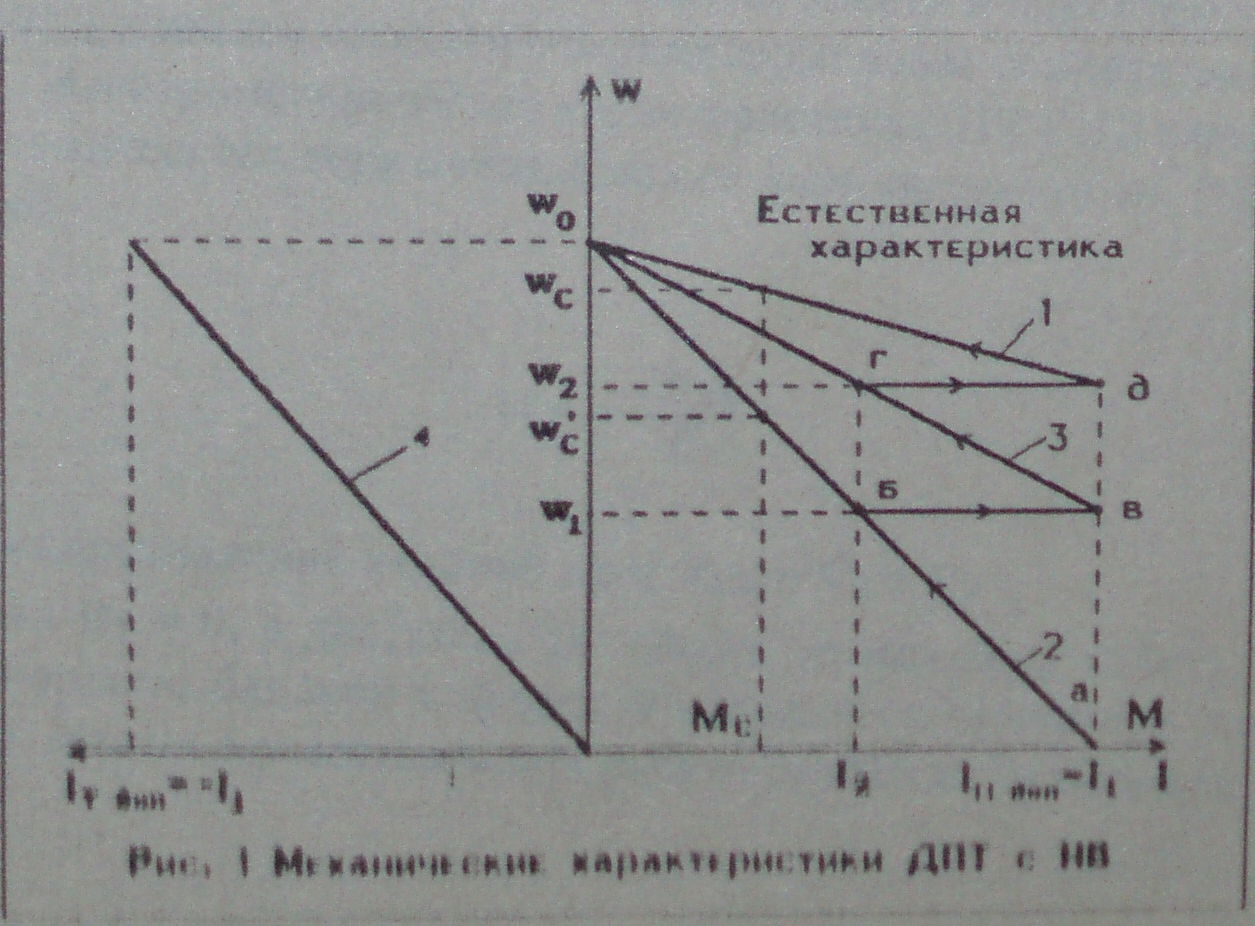
Рассмотрим, например, такой случай. На рис.1 приведена механическая характеристика ДПТ с НИ и двигательном режиме и режиме динамического торможения. Предположим, что по условиям технического процесса необходимо обеспечить угловую скорость вращения двигателя ωс при реактивном моменте нагрузки Mс. При данном моменте возжен случай, когда требуемая скорость может быть достигнута только на естественной характеристике двигатели прямая 1 на рис.У).
Естественная электромеханическая характеристика двигателя постоянного тока с независисымсимым возбуждением имеет вид:
![]() (1)
(1)
где U – напряжение питающей сети;
ω – - угловая скорость двигателя;
с = k·ФН – коэффициент ЭДС двигателя;
RЯ – сопротивление обмотки якоря двигателя, включая сопротивление щёточных контактов.
Коэффициент с определяется по паспортным данным двигателя по формуле:
![]() (2)
(2)
Из (1) ток якоря I можно выразить в виде:
![]() (3)
(3)
В начальный момент пуска двигателя путем подключения его якорной обмотки к сети напряжением U, ротор неподвижен (ω = О и пусковой ток (равный току короткого замыкания):
![]() (4)
(4)
Динамическое торможение двигателя производится путем отключения его якорной обмотки от сети и одновременным шунтированием якорной обмотки тормозным сопротивлением RТ. Электромеханическая характеристика ДПТ с НВ в режиме динамического торможения может быть получена из (1) при U=0:
![]() (5)
(5)
где сопротивление якорной цепи RЯЦ = RЦ + RТ
Если RT = 0, а двигатель до начала торможения работал на скорости, близкой к скорости идеального холостого хода, (что можно осуществить при работе двигателя без нагрузки), о в первый момент после начала торможения U=0, начальная скорость (ωнац = ω0 и тормозной ток двигателя:
![]() (6)
(6)
Таким образом, пусковой и тормозной ток якоря двигателя всегда превышают рабочий ток якоря и часто это превышение может быть значительным (до 4-5 раз и выше).
Ограничения пускового и тормозного токов
Пусковой и гормонной токи можно ограничить введением я цепь якоря дополнительного пускового Rn и тормозного RT резисторов, значения которых рассчитываются по формуле:
![]() (7)
(7)
Однако при пуске на искусственной характеристике (прямая 2 на рис.1) при моменте нагрузки Мс будет достигнута скорость ω'c < ωc. Очевидно, что обеспечить ограничение пускового тока значением IП Доп и одновременно разгон привода до скорости ωс при моменте нагрузки Мс можно, уменьшая величину сопротивления RП no мере увеличения скорости двигателя.
Управление пуском и динамическим торможением ДПТ с НВ
Наиболее простым способом регулирования величины R является ступенчатое шунтирование частей пускового сопротивления.
На puc.2 приведена схема управления двухступенчатым пуском и динамическим торможением ДПТ с НВ.
Динамика электропривода в системе управления пуском и торможением ДПТ может быть описана аналитически.
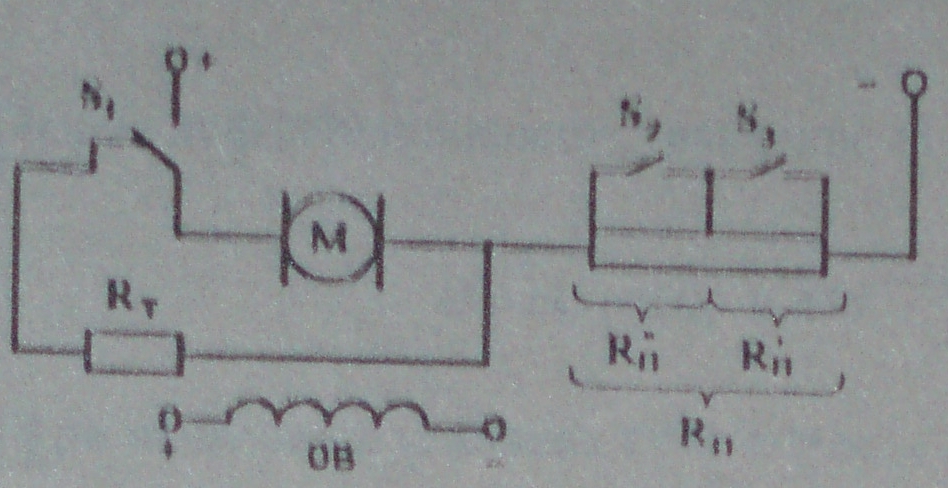
Рис. 2 Схема управления двухступенчатым пуском и динамическим торможением
Уравнение скорости ДПТ с НВ при пуске
Уравнения электрического и механического равновесия при пуске имеют вид:
U = cω + IRЯЦ; (8)
![]() , (9)
, (9)
где J – момент инерции электропривода, приведённый к валу двигателя.
Выражая I из (9), подставляя его в (8) и деля затем обе части (8) на с, получаем:
![]() (10)
(10)
или
![]() (11)
(11)
где электромеханическая постоянная времени:
![]() (12)
(12)
Решая дифференциальное уравнение (11), получаем
ω = ω0 – ωс + А · е-t/Tм (13)
При начальных условиях t = 0, ω = ωнач :
А = ωнач – (ω0 – ωс ) = ωнач – ωс (14)
В частном случае, при пуске двигателя из неподвижного состояния ωнач = 0
ω = ωс ( 1 – е-t/Tм) (15)
График переходного процесса, описываемого уравнением (15), представлен на рис. 3.
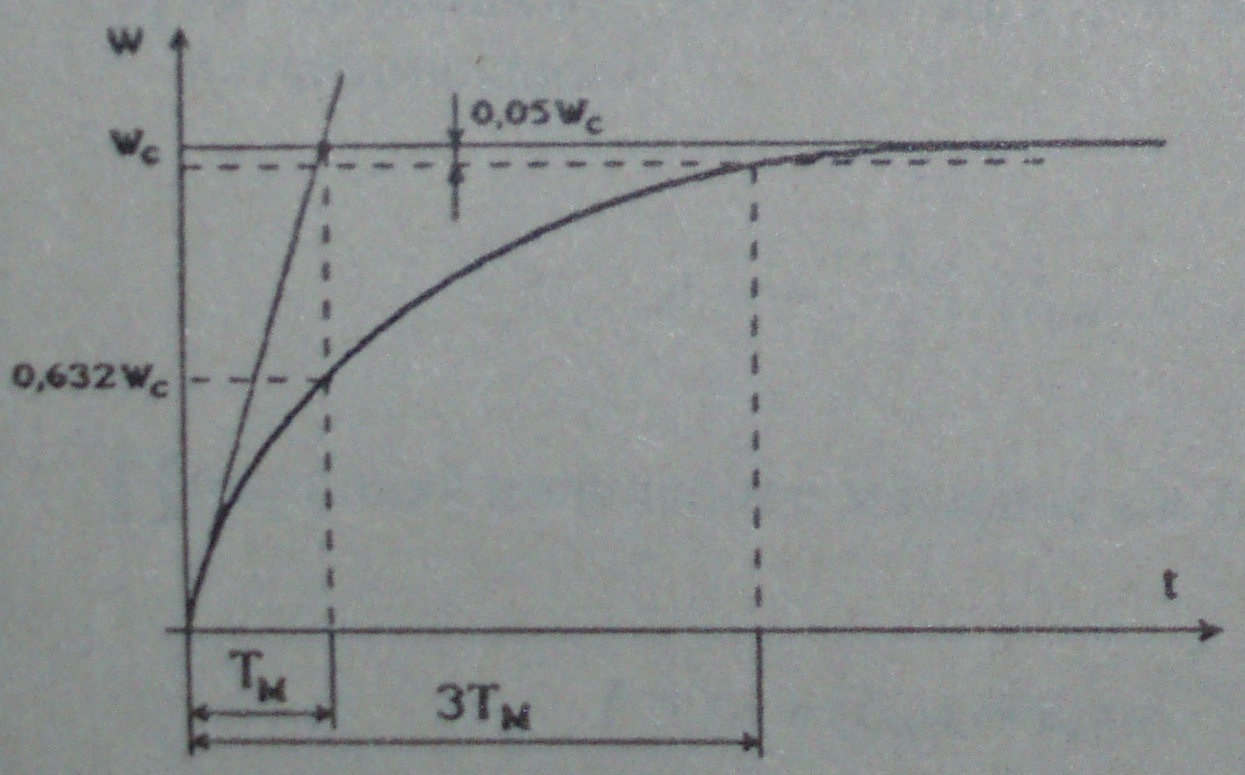
Рисунок 3 График переходного процесса при пуске ДПТ с НВ из неподвижного состояния.
Уравнение тока якоря ДПТ с НВ при пуске
Зависимость тока якоря при пуске двигателя определяется из (9):
![]() . (16)
. (16)
Определив из (12):
![]() (17)
(17)
и подставив значение производной в уравнение для тока, получим:
![]() . (18)
. (18)
Для начальных
условий при t
= 0,
![]() постоянная интегрирования:
постоянная интегрирования:
![]() . (19)
. (19)
Подставляя полученное значение с в (18), получаем:
![]() (20)
(20)
Уравнение скорости ДПТ с НВ динамическом торможение
Уравнение электрического и механического равновесия в режиме динамического торможения имеют вид:
![]() ,
(21)
,
(21)
![]() . (22)
. (22)
Совместное решение
этих уравнений относительно
![]() дает:
дает:
![]() . (23)
. (23)
При начальных
условиях t
= 0,
![]()
![]() ,
,
![]() . (24)
. (24)
Подставляя значение А из (24), получим:
![]() (25)
(25)
Уравнение тока якоря ДПТ с НВ при динамическом торможение
Начальное значение
тока якоря при переходе в режим
динамического торможения при скорости
![]() определяются из (5):
определяются из (5):
![]() , (26)
, (26)
где
![]() .
.
Подставляя в уравнение (18) в качестве начальных условий t = 0, , получим:
![]() , (27)
, (27)
Тогда:
![]() (28)
(28)
Анализ процесса пуска
На рис.4 приведена диаграмма двухступенчатого пуска и динамического торможения ДПТ с НВ, построенная из условий изменения тока при пуске в определенных заданных пределах от I1 до I2, где I2- ток переключения, а при торможение – от I1 до 0.

Пуск осуществляется следующим образом. В исходном состоянии выключатель S1 на рис.2- в левом положении, выключатели S2, S3 разомкнуты.
Процесс пуска начинается переключением выключателя S1 в правое положение .При этом ток достигается значения I1=Iп доп. По мере разгона двигателя ток из-за возрастания ЭДС двигателя уменьшается. Скорость уменьшается согласно (15), ток – согласно (20) при Rяц=Rя+Rп.
По истечение времени t1 ток двигателя достигает значения I2, скорость значения ω1. В этот момент выключателем S2 шунтируют часть R’п сопротивления Rп. Это соответствует переходу с механической характеристики 2 (точка «б» на рис.1) на механическую характеристику 3 (точка «в»). Ток двигателя снова возрастает до значения I1. Дальнейший разгон идет по характеристики 3 (рис.1) из точки «в» в точку «г». Скорость и ток разгоняются согласно (15) и (20). Tм рассчитывается по формуле (12) при Rяц=Rя+R2. По истечению времени t2 ток двигателя снижается до значения I2, скорость двигателя увеличивается до значения ω2, в этот момент выключателем S3 шунтируют часть R’’п сопротивления Rп. Это соответствует переходу механической характеристики 2 (точка «г») на естественную характеристику (точка «д»). Ток двигателя опять возрастает до значения I1. Разгон двигателя идет далее по естественной характеристики и завершается достижением скорости ω0. Скорость и ток изменяются в соответствии с (15) и (20), T определяется по формуле (12), причем Rяц=Rя.
Время t1, за которое ток изменяется от значения I1 до значения I2 на i-той ступени пуска, можно определить, разрешая уравнение (28) относительно времени t:
![]() , (29)
, (29)
где i=1,2,
При этом электромеханическую постоянную времени Tм для соответствующей ступени пуска определяют по формуле (12) с учетом соответствующего данной ступени значения Rяц.
Анализ процесса пуска показывает, что управление пуском может быть осуществлено в функции скорости, тока или времени.
Анализ процесса динамического торможения
Включение режима динамического торможения производится переключением выключателя S1 на рис.2 в левое положение. При этом ток достигает значения –I1=-IT ДОП. Скорость и ток якоря изменяются согласно (25) и (28) соответственно при Iнач=I1.
Время tT, через которое заканчивается торможение при реактивном моменте нагрузке, определяется решением (25) и (28) относительно t ω=0, I=0:
![]() , (30)
, (30)
где Tм определяется согласно (12) при Rяц=Rя+RT
Обоснование применения системы автоматизированного управления процессами пуска и торможения ДПТ
Управление переключателями S1,S2 и S3 на рис.2 может вестись вручную или автоматически.
Автоматизация процессов пуска торможения значительно облегчает управление электродвигателями, устраняет возможные ошибки при пуске, способствует повышению производительности рабочих механизмов.