

2.2.2 Схема электрическая принципиальная
С выхода датчика скорости и направления поступает сигнал, передающий информацию о скорости оборотов с помощью частоты импульсов, а информация о направлении вращения передается с помощью полярности импульсов.
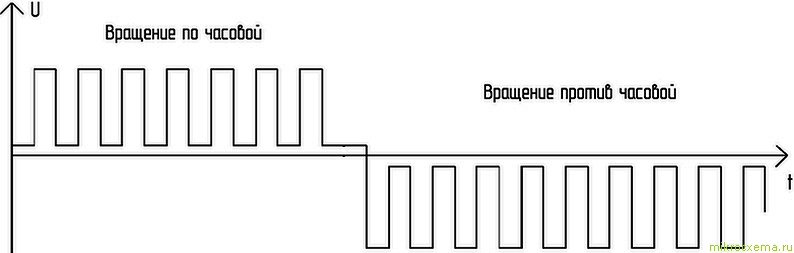
Рисунок 2.4 – Выходной сигнал датчика
Благодаря наличию в схеме датчика источника двуполярного напряжения питания выходной сигнал размахом 5 вольт может иметь отрицательную или положительную полярность.
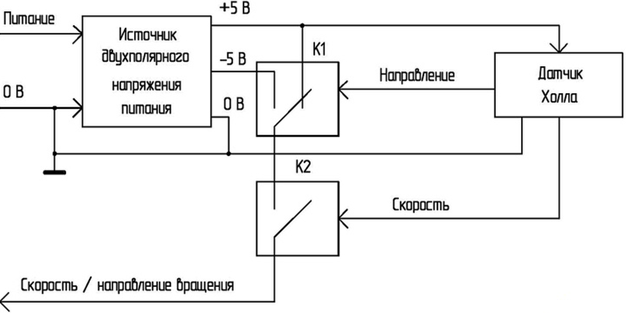
Рисунок 2.5 - Функциональная схема датчика скорости и направления оборотов
Электрическая схема преобразует сигнал от датчика Холла в выходной сигнал датчика скорости и направления вращения, обеспечивая достаточную нагрузочную способность по току. Для минимизации помех, воздействующих на кабель импульсного датчика, сопротивление приёмника сигнала должно быть небольшим. Нужно, чтобы выходной ток датчика был достаточен для принимающего прибора в целях уменьшения влияния помех, искажающих передаваемую информацию. Питание датчика подается по двум проводам. Третий провод используется для передачи сигнала, полярность которого изменяется относительно общего провода питания. Датчик Холла формирует сигнал, несущий информацию о направлении вращения, который управляет переключателем К1. В зависимости от уровня сигнала переключатель К1 подает на переключатель К2 положительное или отрицательное напряжение. Сигнал скорости датчика Холла управляет переключателем К2. Частота сигнала Скорость, сформированного переключателем К2, соответствует половине количества магнитов, размещенных на диске датчика скорости и направления вращения.
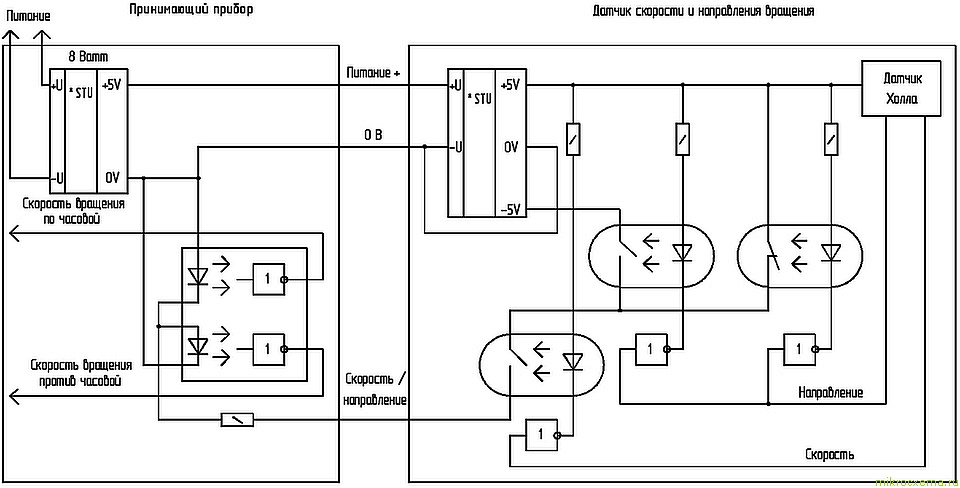
Рисунок 2.6 - Упрощенная схема датчика и принимающего прибора
Логические элементы усиливают сигнал Направление, поступающий от датчика Холла. Логические элементы управляют светодиодами оптронов, один из которых работает на замыкание, а другой на размыкание. При низком логическом уровне сигнала Направление светодиоды оптронов не светятся. Также замкнуты контакты оптрона работающего на размыкание, на контакты оптрона сигнала Скорость подано напряжение + 5 вольт от встроенного двухполярного импульсного источника питания. При высоком логическом уровне сигнала Направление через светодиоды оптронов, управляющих полярностью выходного сигнала датчика скорости и направления вращения, проходит ток, положение контактов оптронов таково, что выходной оптрон подключается к напряжению минус 5 вольт. Сигнал Скорость через усиливающий логический элемент поступает на управление выходным оптроном. Под действием сигнала скорость с выхода датчика поступают импульсы, полярность которых задана сигналом Направление. Применение оптрона на выходе датчика позволяет увеличить нагрузочную способность, что дает возможность передавать сигнал увеличенным током для повышения помехоустойчивости.
На входе принимающего устройства сигнал дешифруется перед измерением частоты. С помощью сдвоенного оптрона в принимающем приборе сигнал, несущий информацию о скорости вращательного перемещения направляется на один из проводов, соответствующий направлению перемещения. Провода “Скорость вращения по часовой” и “Скорость вращения против часовой” подключаются к частотоизмерительным контурам схемы принимающего прибора. В зависимости от того, на каком проводе появляется сигнал, схема распознает направление перемещения. При включении светодиодов как указано на схеме работать будет только один оптрон в зависимости от полярности импульсов входящего сигнала Скорость/направление. Для увеличения помехозащищенности параллельно светодиодам можно подключить резисторы, увеличивающие ток, протекающий по проводу “Скорость/направление”.
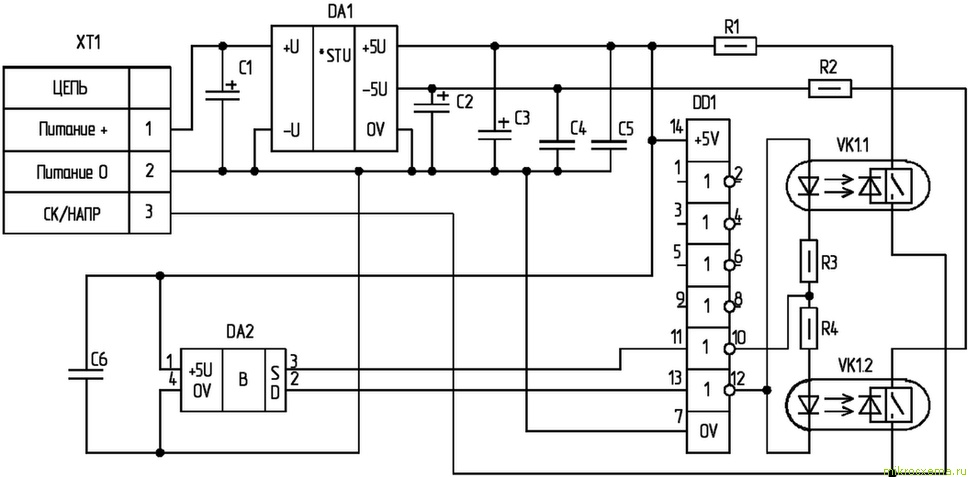
Рисунок 2.7 - Электрическая схема датчика скорости и направления оборотов
Рассмотренный порядок работы реализован в электрической схеме датчика скорости и направления вращения. Сигнал Направление поступает с выхода D микросхемы, использующей эффект Холла, DA2. Высокий логический уровень сигнала Направление преобразуется инвертором, входящим в состав микросхемы DD1, в низкий на выводе 12. Светодиод оптрона VK1.2 получает возможность работать при появлении высокого логического уровня на выводе 10 микросхемы DD1. Одновременно с этим запрещается работа светодиода оптрона VK1.1, так как на анод светодиода подано напряжение низкого логического уровня. Таким образом, благодаря соединению светодиодов оптронов с логическим элементом как изображено на схеме сигнал Направление устанавливает, через какой из оптронов будет проходить сигнал, поступающий с вывода 10 микросхемы DD1. Сигнал скорости оборотов поступает с выхода S микросхемы DA2 на вход инвертора микросхемы DD1. Высокий уровень импульсов, поступающих с вывода 10 микросхемы DD1, заставляет течь ток через резистор R4 и светодиод оптрона VK1.2. Функции оптронов разделяются следующим образом: оптрон VK1.1 формирует сигнал положительной полярности на контакте 3 клеммы XT1, оптрон VK1.2 – отрицательной. В схему датчика входит источник питания, преобразующий однополярное напряжение питания в двухполярное питание схемы. Конденсаторы, входящие в схему датчика, сглаживают помехи, уменьшая их влияние на формирование выходного сигнала. Резисторы R1, R2 задают выходной ток нашего импульсного датчика. Их номинал может быть переопределен в зависимости от входной цепи приёмника для их согласования. Схема использует один сдвоенный оптрон VK1, что позволяет сократить площадь печатной платы и сформировать сигналы Скорость и направление вращения, используя один компонент.
2.3 Разработка принципиальной схемы измерителя
С датчика измерения длины ткани на разъем Х1 приходят:
- двухполярный сигнал UД от –U до +U, который не может быть обработан микроконтроллером (график 2.1);
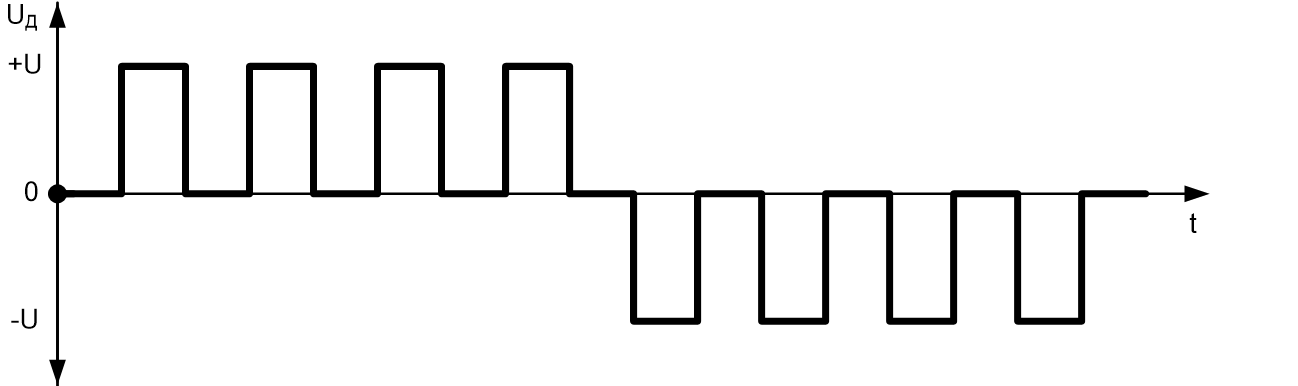
График 2.1
- логический сигнал, информирующий о смене направления движения ткани DIR (график 2.2);

График 2.2
- напряжение для питания всех элементов схемы, имеющих гальваническую связь с элементами внешнего датчика.
Рисунок 2.8 – Принципиальная схема измерительного прибора
Сигнал UД поступает на двухполупериодный мостовой выпрямитель, построенный на импульсных диодах VD1÷VD4 2Д524А. Мостовой выпрямитель формирует последовательность импульсов одной полярности UДО (график 2.3).

График 2.3
Однополярный сигнал UДО поступает на логический элемент (ЛЭ) 2И-НЕ DD1.1 интегральной схемы К1533ЛА21 с повышенной нагрузочной способностью выхода (15 мА). ЛЭ обеспечивает работу светодиода оптрона U1 (КР1010), обеспечивающего гальваническую развязку внутренних элементов схемы и внешних элементов датчика.
Оптрон представляет собой светодиод и фототранзистор, размещённые в одном корпусе. Форма прямоугольного импульса могла быть искажена (сглажена) и её необходимо восстановить. Поэтому импульс с коллектора фототранзистора поступает на триггер Шмидта DD2.1 (К1533ТЛ2), формирующего прямоугольный импульс с крутым фронтом для обеспечения надёжного считывания импульса микроконтроллером DD3.
Обработка сигнала DIR выполняется аналогично:
Однополярный сигнал UДО поступает на логический элемент (ЛЭ) 2И-НЕ DD1.1 интегральной схемы К1533ЛА21 с повышенной нагрузочной способностью выхода (15 мА). ЛЭ обеспечивает работу светодиода оптрона U1 (КР1010), обеспечивающего гальваническую развязку внутренних элементов схемы и внешних элементов датчика.
Далее импульс с коллектора фоторезистора поступает на триггер Шмидта DD2.1 (К1533ТЛ2)
Однокристальный микроконтроллер DD3 АТmega32 принимает оба сигнала UДО и DIR в порт и выполняет анализ:
- если DIR=0, импульс UДО суммируется;
- если DIR=1, импульс UДО вычитается.
Индикатор DD3 (четыре строки по 16 символов) WH4004A (фирма Winster) отображает длину ткани в метрах.
Для обеспечения рабочего тока светодиодов оптронов U1 используются резисторы R1, R3. Номинал сопротивления для активного выходного нулевого уровня управляющего воздействия рассчитывается по формуле:
 ,
,
где
Uпит
– напряжение питания равное +5 В;
![]() - прямое падение напряжения на светодиоде
равное 2,8 В;
- прямое падение напряжения на светодиоде
равное 2,8 В;
![]() - выходное напряжение логического нуля
(от 0 В до 0,4 В);
- выходное напряжение логического нуля
(от 0 В до 0,4 В);
![]() -
постоянный прямой ток светодиода равный
10 мА.
-
постоянный прямой ток светодиода равный
10 мА.
Uпит, , , - паспортные значения.
![]() =
210 Ом.
=
210 Ом.
Проверяем наличие указанного номинала по шкале номинальных сопротивлений для резисторов общего применения по ряду Е6, Е12 и Е24, приведенных в таблице «Номинальные сопротивления по ряду Е6, Е12 и Е24».
Таблица Номинальные сопротивления по ряду Е6, Е12 и Е24
Индекс ряда |
Числовые коэффициенты, Ом |
|||||
Е6 |
1,0 |
1,5 |
2,4 |
3,3 |
4,7 |
6,8 |
Е12 |
1,0 |
1,5 |
2,2 |
3,3 |
4,7 |
6,8 |
1,2 |
1,8 |
2,7 |
3,9 |
5,6 |
8,1 |
|
Е24 |
1,0 |
1,5 |
2,2 |
3,3 |
4,7 |
6,8 |
1,1 |
1,6 |
2,4 |
3,6 |
5,1 |
7,5 |
|
1,2 |
1,8 |
2,7 |
3,9 |
5,6 |
8,2 |
|
1,3 |
2,0 |
3,0 |
4,3 |
6,2 |
9,1 |
|
Примечание. Для получения номинала резистора каждый коэффициент может быть умножен на 10n , где индекс n изменяется от -2 до +6.
Расчетное значение Rо = 555 Ом. Из таблицы 1 выбираем ближайшее большее значение номинала для Rо равное 2,4 ∙ 102 Ом.
Получаем Rо = 240 Ом.
К параметрам резистора также относится номинальная мощность рассеяния Рн - это наибольшая мощность, которую резистор может рассеивать в течение гарантированного срока службы при сохранении параметров в установленных пределах. Значение Рн зависит от конструкции резистора, физических свойств материалов и температуры окружающей среды. Для нормальной работы резистора необходимо, чтобы мощность, выделяемая на резисторе Ро в данной электрической цепи, не превышала номинальной мощности рассеяния
![]()
Рассчитаем мощность Ро, выделяемую на резисторе Rо по формуле:
![]() =
0,024 Вт.
=
0,024 Вт.
Номинальную мощность рассеяния Рн резистора (ближайшее большее значение) выбираем из таблицы «Значения номинальной мощности рассеяния».
Таблица Значения номинальной мощности рассеяния
Номинальная мощность рассеяния, Вт |
|||||||||||
0,01 |
0,025 |
0,05 |
0,062 |
0,125 |
0,25 |
0,5 |
1 |
2 |
3 |
4 |
5 |
8 |
10 |
16 |
25 |
40 |
63 |
80 |
100 |
160 |
250 |
500 |
- |
Выбираем номинальную мощность Рн резистора. Расчетное значение мощности Рон = 0,024 Вт.
Выбираем из таблицы ближайшее большее значение Рн = 0,025 Вт.
Выбираем резистор из справочника «Резисторы постоянные»: резистор типа С2 - 33Н (замена МЛТ).
В справочнике минимальная мощность резистора типа С2 - 33Н равна 0,125 Вт, поэтому корректируем значение мощности с 0,025 Вт на 0,125 Вт.
Выбираем резистор С2 - 33Н - 0,125 – 240 ± 5% - А - Д – ОЖО.467.093 ТУ.
ЗАКЛЮЧЕНИЕ
В данном курсовом проекте был рассчитан измеритель длины ткани при разбраковке, на промерочно-разбраковочной машине, с использованием импульсного датчика количества, направления и скорости оборотов.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
Селянина Е.Н., Никитина И.Г., Платова СЮ. Экономика, организация и планирование производства в легкой промышленности: Учеб. для вузов — М.: Легпромиздат, 1992. — 464 с.
Соловьев А.Н., Кирюхин СМ. Оценка и прогнозирование качества текстильных материалов. — М.: Легкая и пищ. пром-сть, 1984. — 215 с.
Кирюхин СМ., Додонкин Ю.В. Качество тканей.— М.: Легпромбытиздат, 1986. — 123 с.
Немнюгин С, Стесик О. Параллельное программирование для многопроцессорных вычислительных систем. —СПб.: БХВ, 2002.— 396 с.
Бэстенс Д.Э. Нейронные сети и финансовые рынки: принятие решений в торговых операциях. / Пер.с англ./ СВ. Курочкин. — М.: Издательство ТВП, 1997. — 235 с.
В.Н. Федосеев, Е.К. Шигалов, СЛ. Костин. Статистический анализ оценки сортности и причин появления дефектов в ткани // Известия вузов. Технология текстильной промышленности. - 1989. -№ 5.
ГОСТ 25506-82. Пороки тканей. Термины и определения. -М.: Изд-во стандартов, 1983.
Контроль технологических параметров текстильных материалов: методы и устройства / Под ред. Л. К. Таточенко. - М.: Легкая и пищевая промышленность, 1983. - 160 с.
Любимцев В. В. Разработка теоретических основ и технических средств повышения эффективности обнаружения дефектов структуры текстильных полотен: Дисс... д-ра техн. наук. - Кострома, 1996. — 403 с.
Куликов А. М. Исследование статических и динамических характеристик датчика перекоса утка // Изв. вузов. Технология текстильной промышленности. — 1966. — №4.
А. с. 422807 СССР, МКИ D 06h 3/12. Устройство для обнаружения перекоса утка / А. К Расторгуев, В. В. Любимцев. - 1972.
А. с. 229442 СССР, Кл. 8Ь , 406. Устройство для правки утка / К. К. Рейдик. — 1968.
А. с. 227988 СССР, Кл. 8Ъ , 406. Датчик перекоса утка / А. И. Волков, А. Б. Палей. —1969.
Пат. RU 21646 С, G01N33/36,21/00. Способ анализа геометрических структурных параметров ткани / Шляхтенко П. Г. — Опубл. 27.03.2001.
Комаров А.Б., Коробов Н.А. Алгоритмы идентификации пороков по изображению ткани // Современные наукоемкие технологии и перспективне материалы текстильной и лёгкой промышленности (Прогресс-2002): Тез. докл. межд. научн. -техн. конф. - Иваново,2002.
Комаров А.Б., Коробов Н.А. Разработка и применение программного обеспечения и модернизация сканера для определения оптических свойств ткани //Современные наукоёмкие технологии и перспективные материалы текстильной и лёгкой промышленности (Прогресс-2001): Тез. докл. межд. научно -техн. конф. - Иваново,2001.
G. О. Allgood, D. А. Тгеесе, Textile laser-optical system for inspecting fabric structure and form. — Oak Ridge National Lab, 1996.
Пат. RU 2131605 CI, 6G01N33/36. Бесконтактный способ анализа структуры ткани / Лустгартен Н.В. Сокова Г.Г Сергеев А.С.■■— Опубл. 10.06.99.
Пат. RU 99111448/12 CI G01N33/36. Способ распознавания компьютерного изображения текстильных изделий / Сокова Г.Г. Магнитский Е.В. Лукоянов А.Л.—Опубл. 20.06.2000.
Официальная интернет-страница производителя системы І-ТЕХ [Электронный ресурс]: Электрон, дан. — Режим доступа: www.evs.co.il. — Данные соответствуют 2003 г. — Яз. англ.
Официальная интернет-страница производителя системы Вагсо Vision [Электронный ресурс]: Электрон, дан.— Режим доступа: www.barco.com/textiles. — Данные соответствуют 2003 г. — Яз. англ.
Прибор для контроля ткани // Легкая промышленность: Технология и оборудование. — 2000.—№10. —С. 16-17.
Официальная интернет-страница производителя системы Uster Fabriscan [Электронный ресурс]: Электрон, дан.— Режим доступа: www.uster.com. — Данные соответствуют 2003 г. — Яз. англ.
Официальная интернет-страница производителя системы TASQ [Электронный ресурс]: Электрон, дан. — Режим доступа: http://www.tasq.fr/. — Данные соответствуют 2003 г. — Яз. англ.