

Основные формулы и определения.
При наличии в пределах видимости трех ориентиров можно получить на карте точное место судна, измерив секстаном углы между этими ориентирами (рис. 6.1).

Рис. 6.1
Окружности, внутри которых располагаются данные углы, являются линиями положения судна (изолиниями) в момент наблюдений.
Для построения окружности, вмещающей угол , нужно соединить параметры А и В прямой линией, из середины линии АВ (точки К1) провести перпендикуляр К1О1 и от точки А – прямую АС1 под углом 90 к линии АВ. Точка О1 пересечения линии АС1 с перпендикуляром К1О1 является центром окружности, внутри которой находится угол . Аналогично строится окружность, вмещающая угол . Одновременно измеряются углы и 1 и находится точка пересечения обеих изолиний М, являющаяся местом положения судна. Место судна наносится на карту с помощью протрактора или кальки.
Приступая к определению места судна по двум горизонтальным углам, следует помнить, что его определение может оказаться невозможным (случай неопределенности), если судно находится на окружности, проходящей через три выбранных для наблюдения ориентира (рис. 6.2).
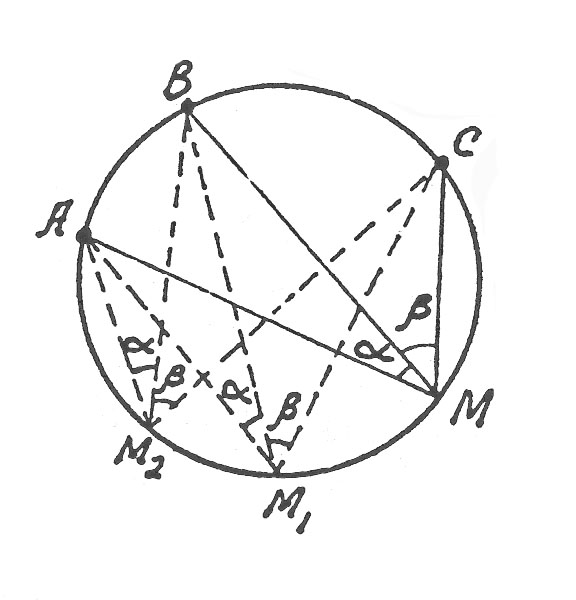
Рис. 6.2
Невозможно определить место судна при наличии следующих признаков:
– ориентиры А, В и С расположены на одной прямой;
– судно находится внутри треугольника, вершинами которого являются наблюдаемые ориентиры А, В и С;
– средний ориентир В находится ближе к судну, чем любой из двух крайних;
– все три ориентира расположены примерно на одинаковом расстоянии от судна.
Для оценки точности места, полученного по двум горизонтальным углам, применяется формула
 ,
,
где D1, D2, D3 – расстояния до ориентира А, В, С соответственно; d1, d2 – базовые расстояния АВ и ВС; – угол пересечения линий положения, равный 360 ( ; m = m = m – погрешность измерения горизонтального угла.
Задачи на прокладку пути судна с определением места судна по трем пеленгам. Исключение ошибки в принимаемой поправке компаса. Оценка точности обсервованного места. Основные формулы и определения.
Измеренные быстро, последовательно и в установленной очередности компасные пеленги после приведения к одному моменту и исправления с учетом поправки компаса наносятся на карту. В случае возникновения треугольника погрешности со стороной менее 0,5 мили, обсервованное место (точка М) принимается в центре треугольника (рис. 6.3).
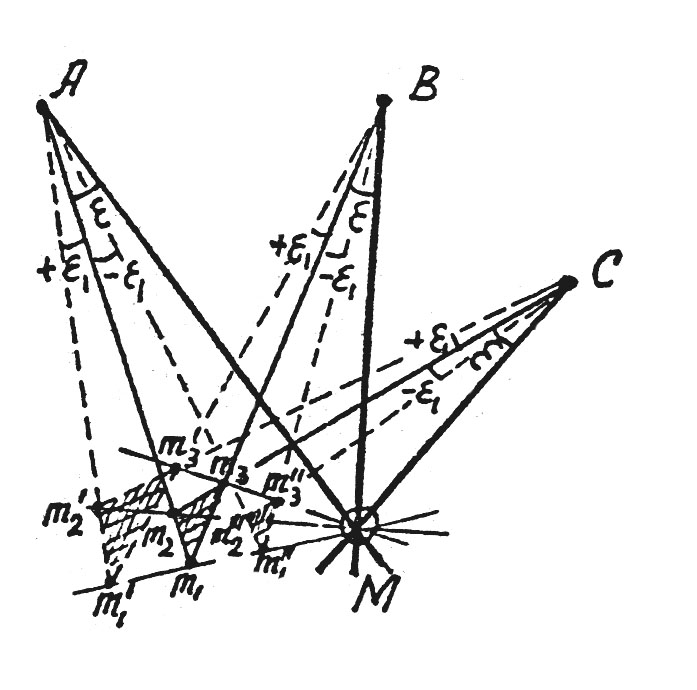
Рис. 6.3
При пересечении пеленгов Аm1, Вm3, Сm2 может образоваться треугольник m1–m2–m3 со стороной более 0,5 мили. Необходимо предотвратить его появление, устранив ошибки, возникающие:
– при повторных наблюдениях;
– в работе одного из навигационных ориентиров;
– при пеленговании и прокладке;
– при неодновременном измерении пеленгов.
Если при повторных измерениях, тщательной обработке пеленгов и прокладке их на карте треугольник погрешности по-прежнему имеет значительные размеры, то причиной его появления является ошибочное значение принимаемой поправки компаса.
С целью определения верного значения поправки компаса необходимо "разогнать" ложный треугольник. Для этого требуется увеличить или уменьшить все три пеленга на одинаковую величину ε (рис. 6.3) и проложить такие пеленги на карте. Получим новый треугольник погрешностей m1'–m2'–m3'. Соответствующие вершины треугольников соединяем прямыми линиями. Точка пересечения этих линий дает верное обсервованное место судна М (рис. 6.3).
Из обсервованной точки М снимаем с карты истинные направления на пеленгуемые ориентиры. Сравнив их с компасными, получаем три поправки компаса. Взяв среднее из них, получаем верное значение поправки компаса. Если учесть склонение, можно получить девиацию компаса на данном курсе.