

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ БЮДЖЕТНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
НОВОСИБИРСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА АЭРОГИДРОДИНАМИКИ

Отчёт по Лабораторным работам
по дисциплине «Агрегаты и системы летательных аппаратов»
Выполнил:
Студент
Группа
Факультет ЛА
Проверил:
Преподаватель д.т.н. профессор Подружин Е.Г.
Рейтинг:
Выполнение ___________
Защита ___________
Итого ___________
Новосибирск
2013 год
Лабораторная работа №1 гидравлическая система выпуска-уборки шасси маневреннного самолета
Цель работы
1. Изучение устройства и работы системы выпуска-уборки шасси силовой гидросистемы.
2. Освоение методики и приобретение практических навыков отработки технологических процессов выпуска-уборки шасси на учебном стенде.
Принципиальная схема системы выпуска передней стойки шасси:
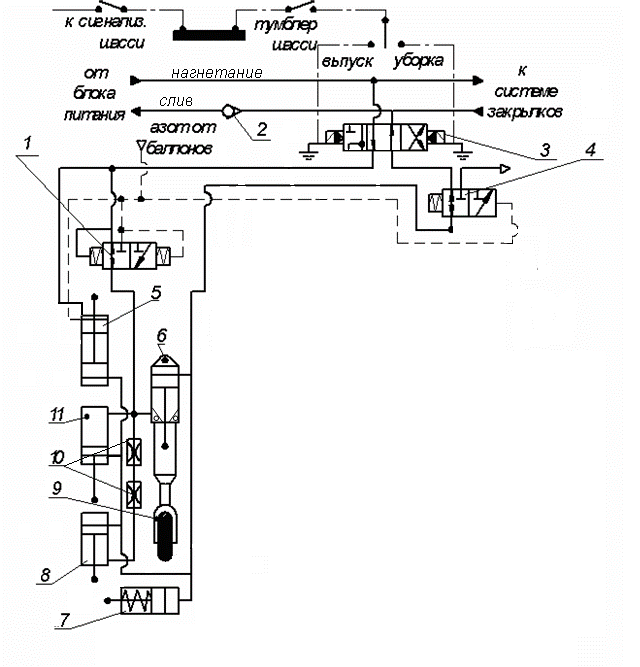
Рис 1.
1 – челночный клапан;
2-обратные клапаны;
3-гидроэлектрокран ГА-142/1;
4-клапан переключения;
5 – цилиндр замок убранного положения;
6 – цилиндр замок убранного положения;
7 – цилиндр автоматического торможения;
8 – цилиндр переключения плеча загрузки в канале рысканья;
9 – передняя стойка;
10 – дроссели;
11 – согласующий клапан;
Выпуск передней стойки
Жидкость из линии нагнетания через гидроэлектрокран 3 (рис 1)поступает в цилиндр 5 и открывает замок, фиксирующий стойку в убранном положении. Одновременно от крана 3 через челночный клапан 1 жидкость подается: к цилиндру 11 для подготовки к фиксации замка выпущенного положения стойки, через дроссели 10 к цилиндру 8 переключения механизма загрузки педалей, к цилиндру 6 передней стойки 9, при этом поршень цилиндра 6 снимается с шарикового замка и происходит выпуск передней стойки.
Вытеснение жидкости из полостей цилиндров 6, 8, 11 и 5 происходит через переключатель 4 и кран 3 в магистраль слива.
В выпущенном положении стойка фиксируется механическим замком выпущенного положения.
КОНСТРУКТИВНЫЕ ОСОБЕННОСТИ И ПРИНЦИП РАБОТЫ АГРЕГАТОВ СИСТЕМЫ ВЫПУСКА-УБОРКИ ШАССИ
Кран ГА-142/1трехпозиционный электромагнитный с плоским распределительным золотником предназначен для дистанционного управления подачей жидкости.
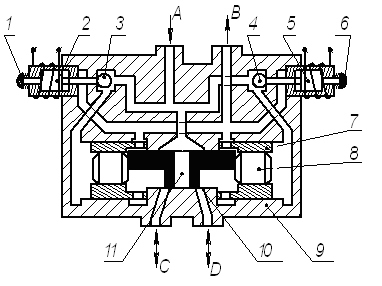
Рис 2. Схема электромагнитного крана ГА-142/1:
1, 6 Кнопка ручного управления; 2, 5 электромагниты; 3, 4 шарики; 7, 8 поршни; 9 корпус; 10 золотник; 11 напорная магистраль
При обесточенных электромагнитах 2 и 5 (Рис 2.)и работающем насосе шарики 3 и 4 отжимаются и пропускают жидкость к поршням 7 и 8. Поскольку площади поршней равны, то золотник фиксируется в нейтральном положении. При этом напорная магистраль 11 располагается напротив перемычки корпуса и запирается, а полости потребителей штуцерами С и D соединяются со сливной магистралью через штуцер В.
При подаче напряжения на левый электромагнит 2 его сердечник через толкатель смещает вправо шарик 3, который отключает левую группу поршней 7 и 8 от напорной магистрали, одновременно соединяя управляющие полости поршней со сливной магистралью. Под действием давления жидкости внутренний правый поршень 8 смещается совместно с золотником 10 в крайнее левое положение. Поршень 7 правой группы остается неподвижным, так как он упирается в корпус 9. В результате смещения золотника напорная магистраль 11 соединяется со штуцером С потребителя, другая полость которого через штуцер D соединяется с линией слива.
При снятии напряжения с электромагнита 2 шарик 3 возвращается в исходное положение, соединяя левую полость перед поршнями с напорной магистралью. Давлением жидкости на левые наружный и внутренний поршни золотник 10 возвращается в нейтральное положение. Перемещение золотника 10 вправо происходит при подаче напряжения на правый электромагнит 5. Управлять краном можно вручную кнопками 1 и 6.
Вывод: Проведя работу мы изучили принцип работы систем выпуска-уборки шасси силовой гидросистеме. А так же приобрели практические знания на учебном стенде самолёта СУ-15.