

Критерий Стьюдента
t-критерий
Стьюдента применяется, когда необходимо
сделать статистический вывод, равно ли
математическое ожидание M{Х}
генеральной совокупности некоторому
предполагаемому значению С или
когда требуется построить доверительный
интервал для M{Х}.
Обнаружено, что случайная величина
t (при независимых
наблюдениях) распределена по закону
Стьюдента, если Х распределена
нормально:
![]() где
N- общее число наблюдений (объем
выборки),
Х - среднее арифметическое
случайной переменной Х;
S{Х),
S{X}-
среднеквадратическое отклонение
соответственно единичных значений Х
и среднего арифметического Х.
где
N- общее число наблюдений (объем
выборки),
Х - среднее арифметическое
случайной переменной Х;
S{Х),
S{X}-
среднеквадратическое отклонение
соответственно единичных значений Х
и среднего арифметического Х.
Критерий Фишера
Критерий Фишера применяется при проверке гипотезы о равенстве дисперсий двух генеральных совокупностей, распределенных по нормальному закону. F-критерий Фишера называют дисперсионным отношением, так как он формируется как отношение двух сравниваемых несмещенных оценок дисперсий:причем в числителе ставится большая из двух дисперсий.
Приведение измерений к центрам геодезических пунктов.70
Приведение измерений к центрам геодезических пунктов.
При угловых измерениях на каждом пункте необходимо, чтобы ось вращения теодолита J, установленного на столике сигнала, и ось симметрии визирного цилиндра V находились на одной отвесной линии, проходящей через центр пункта в точке O (рис. 1.) Однако в действительности такого совпадения нет. Поэтому перед началом наблюдений на пункте и после их окончания определяют элементы центрировки теодолита (е, Ө) и элементы редукции визирной цели (е1, Ө1), называемые элементами приведения, а затем вычисляют поправки в измеренные направления за центрировку и редукцию.

Рис. 1. Элементы приведения на пункте триангуляции
ОJ
= e — линейный
элемент центрировки;
 —
угловой элемент центрировки;OV
=e1 — линейный
элемент редукции;
1—
угловой элемент редукции;
—
угловой элемент центрировки;OV
=e1 — линейный
элемент редукции;
1—
угловой элемент редукции;
(Для определения элементов приведения над центром пункта устанавливают облегчённую мензулу или столик, на горизонтальную поверхность которого прикрепляют центрировочный лист и стрелкой показывают направление на север. Затем с помощью вспомогательного теодолита, установленного на расстоянии примерно в полтора раза больше, чем высота геодезического сигнала, проектируют на этот лист ось вращения теодолита и ось визирного цилиндра. Проектирование выполняют с трёх установок теодолита. Аналогичным образом при трёх установках теодолита проектируют центр пункта на этот лист. При этом образуется треугольник погрешностей. Точки J и V соединяют с точкой О и линейкой измеряют с точностью до 0,001 м линейный элемент центрировки e = OJ и линейный элемент редукции e’ = OV. В точках J и V большим транспортиром с точностью до 15' измеряют углы Ө, Ө1.)
Возникает задача согласования результатов угловых наблюдений, т.е. приведения их к центрам знаков. Для чего в каждое наблюдаемое на знаке направление должны быть введены две поправки:
а) поправка за несовпадение центра вращения теодолита с центром знака или поправка за центрировку (с);
б)
поправка за несовпадение наблюдаемого
визирного цилиндра с центром знака
( ).
).
П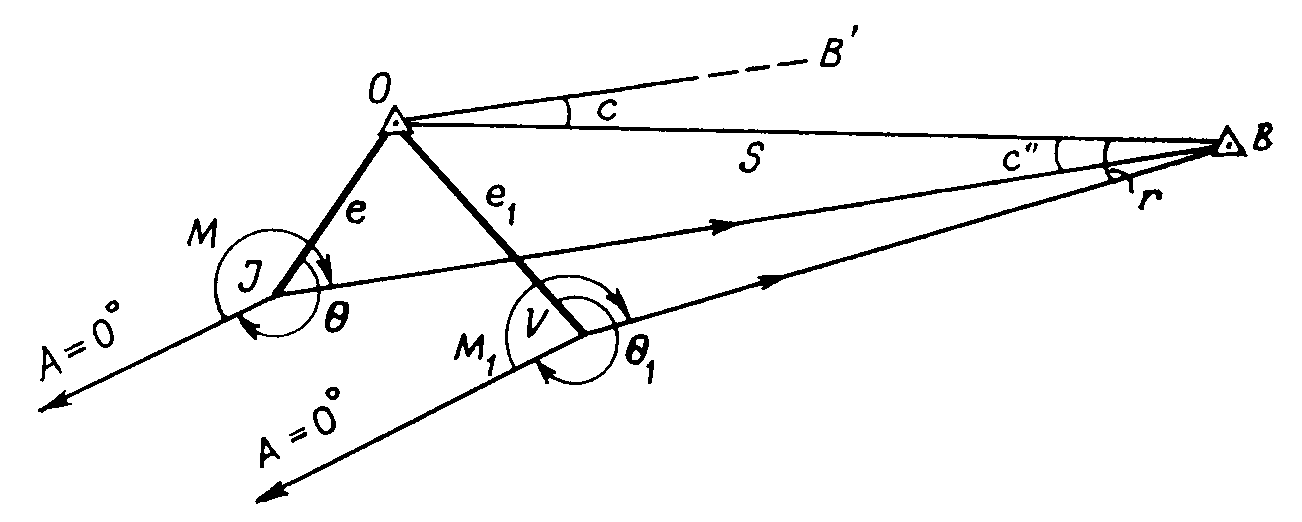 оясним
эти поправки. Пусть на пункте с центром
в точке 0 выполняются угловые
измерения. Теодолит находится в точке
J , визирный цилиндр в точке
V (рис. 2). Из точки J
проведем направление JА =
0˚ на начальный пункт А и направление
JВ на какой- либо другой пункт
В ; из точки V
— направления VА
и VВ на
те же пункты. Обозначим через М —
измеренные направления на пункте,
отсчитываемые от начального. Проведем
из точки 0 направление 0В'
параллельно направлению JВ. Угол
с" =
оясним
эти поправки. Пусть на пункте с центром
в точке 0 выполняются угловые
измерения. Теодолит находится в точке
J , визирный цилиндр в точке
V (рис. 2). Из точки J
проведем направление JА =
0˚ на начальный пункт А и направление
JВ на какой- либо другой пункт
В ; из точки V
— направления VА
и VВ на
те же пункты. Обозначим через М —
измеренные направления на пункте,
отсчитываемые от начального. Проведем
из точки 0 направление 0В'
параллельно направлению JВ. Угол
с" = В'
0В равен
поправке за центрировку теодолита в
измеренное направление JВ,
введя которую получаем искомое
направление 0В между центрами
пунктов 0 и В. Решив треугольник
J0В , в котором S
= длина стороны между пунктами 0 и
В, а
0JВ=
(М+
В'
0В равен
поправке за центрировку теодолита в
измеренное направление JВ,
введя которую получаем искомое
направление 0В между центрами
пунктов 0 и В. Решив треугольник
J0В , в котором S
= длина стороны между пунктами 0 и
В, а
0JВ=
(М+ —
360˚), запишем теорема sin
—
360˚), запишем теорема sin

Рис. 2. Поправка в направление за центрировку теодолита и редукцию визирной цели
Ввиду малости с формулу (10.1) можно записать в виде:
 (10.2)
(10.2)
Поскольку визирная цель V находится не над центром пункта 0, измеренное на пункте В направление ВV следует исправить поправкой r = 0ВV за редукцию визирной цели, чтобы получить направление ВО. Решив треугольник 0ВV, , 0VВ= (М1+ 1— 360˚), найдем малый угол r- поправка за редукцию:
 (10.3)
(10.3)
В (10.2) и (10.3) e и – соответственно, линейный и угловой элементы центрировки на пункте 0; e1 и 1 – линейный и угловой элементы редукции на пункте 0; S – расстояние от пункта наблюдения до наблюдаемого пункта; M- значение измеренного направления на пункт, для которого вычисляются поправки.
Следует отметить, что поправки за центрировку теодолита вводят в направления, измеренные на пункте 0, а поправки за редукцию визирной цели со своим знаком — в обратные направления АV, ВV, поскольку визирование с пунктов А, В производится не на центр пункта 0, а на визирную цель V, не совпадающую с ним.
Итог:
Поправки за центрировку и редукцию угловых измерений вычисляют по формулам


Обозначения см. в (10.2) и (10.3).
А для линейных измерений — по формулам 10.7
 (10.7)
(10.7)
В 10.7с и r — поправки за центрировку и редукцию измеренной линии.