

Оцінка точності gps-спостережень
Основними факторами, що впливають на точність визначення координат точок при GPS-спостереженнях та причинами виникнення похибок є:
Кількість супутників, які спостерігає приймач під час зйомки;
Геометрія супутників;
Тривалість спостереження.
Співвідношення сигнал/шум SNR.
Вплив іоносфери (для одночастотних приймачів).
В основному ці фактори враховуються, проте повністю їх усунути не вдається.
Оцінка точності відбувається в програмних продуктах при опрацюванні базових ліній, зрівнюванні та калібруванні. При цьому інформацію про точність визначення базових ліній і точок можна переглянути, а при недостатній точності для користувача з’являється повідомлення. Оцінку точності можна провести і в ручному режимі.
Для досягнення необхідної точності при вимірюванні методами з подальшою обробкою рекомендується під час спостережень дотримуватись рекомендацій виробника щодо тривалості спостереження, максимального значення PDOP i SNR, маски відсічення супутників, місця встановлення базового та роверного приймачів тощо.
3. Методичні вказівки для виконання лабораторних робіт
Метою лабораторних робіт є закріплення студентами теоретичного матеріалу з дисципліни, який висвітлюється на лекціях та при самостійному опрацюванні інформації з інших джерел стосовно супутникової геодезії.
В даному курсі лабораторні роботи охоплюють теоретичний матеріал з питань застосування систем координат та часу, орбітального руху і параметрів орбіти, а також практичного застосування глобальної позиційної системи GPS при визначенні координат точок земної поверхні різними методами та точністними характеристиками для забезпечення землевпорядних та кадастрових робіт.
Лабораторна робота № 1 Тема: Перетворення координат точки на земній поверхні з референцної геодезичної системи координат b, l, h в референцну декартову систему координат Xr, Yr, Zr
Мета: Вивчити основні системи координат, що використовуються в супутниковій системі, та навчитися перетворювати координати точки з геодезичної в прямокутну референцну систему координат і навпаки, використовуючи відомі формули.
Теоретичний матеріал
Положення точок по всій фізичній поверхні Землі щодо еліпсоїда задаються просторовими геодезичними координатами В,L,H.
Для довільної точки М на фізичній поверхні Землі геодезична широта В – кут між площиною екватора і нормаллю до еліпсоїда в точці М, геодезична довгота L- двогранний кут між площинами початкового геодезичного (грінвіцького) меридіана і геодезичного меридіана точки М. Геодезична висота Н точки М над еліпсоїдом відраховується вздовж нормалі від поверхні еліпсоїда до фізичної поверхні Землі.
Початок референцної декартової системи координат ОХr, Yr, Zr суміщений з центром прийнятого референц-еліпсоїда. Вісь ОХr збігається або паралельна до середньої осі обертання Землі і додатна до північного полюса, вісь ОZr лежить в площині екватора і спрямована в точку перетину екватора з геодезичним меридіаном Грінвіча , вісь ОYr доповнює до правої системи.
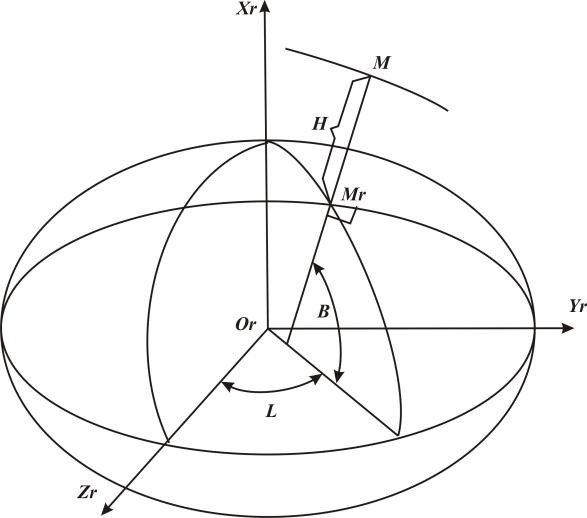
Рис. 13.1 Системи координат
Спостереження ШСЗ виконують з поверхні Землі. У топоцентричних системах координат початок координат збігається з точкою фізичної поверхні Землі, якою є пункт спостереження ШСЗ, а осі паралельні до відповідних осей для заданої геоцентричної системи (зоряної або грінвіцької ).
Завдання на самостійне опрацювання перед виконанням лабораторної роботи
Вивчити визначення географічної, геодезичної, астрономічної, земної геоцентричної, умовної інерціальної систем координат;
Вивчити класифікації небесних сфер та систем координат;
Самостійно вивести робочі формули зв’язку між
референтцними геодезичними B, L, H і прямокутними Xr, Yr, Zr системами координат;
Засвоїти основний порядок та можливості роботи в програмному продукті «Excel».
Завдання 1. Перетворити геодезичні координати довільної точки, що обчислюється за варіантом, в прямокутні просторові в програмному продукті «Excel».
Геодезичні координати обчислюються за формулами згідно варіанту:
L =27033'35''+n·1'30'' B=51012'26''- n·1'30'' H=2000м+10м·n,
де n – порядковий номер студента за списком групи.
![]() Робочі
формули:
Робочі
формули:
N H
cos B cos L;
 N H
)
cos
B
sin
L;
N H
)
cos
B
sin
L;
(13.1)
N 1 e2
H sin B;
![]() N a
N a
a
1 e2 sin2 B
W
, (13.2)
![]() де:
N
–
радіус
кривини
першого
вертикала,
W
–
функція
геодезичної
широти.
Обчислення
можна
проконтролювати,
використовуючи
формулу:
де:
N
–
радіус
кривини
першого
вертикала,
W
–
функція
геодезичної
широти.
Обчислення
можна
проконтролювати,
використовуючи
формулу:
a X 2 Y 2
Z 2 1
e'2
a H
![]() W
. (13.3)
W
. (13.3)
Обидві частини рівнянь мають збігатись з точністю до цілих.
![]() Для
референц-еліпсоїда
Красовського;
Для
референц-еліпсоїда
Красовського;
а=6378245м; e'2
0,006738525;
e2 =0,006693422.
Завдання 2. Перетворити прямокутні просторові координати довільної точки в геодезичні в програмному продукті «Excel».
Робочі формули
Геодезична довгота обчислюється за формулою:
![]() tgL Y
;
tgL Y
;
X
(13.4)
![]() Проекція геодезичної нормалі на площину екватора
обчислюється
за
формулою:
Проекція геодезичної нормалі на площину екватора
обчислюється
за
формулою:
D X secL
Y cos ecL;
(13.5)
Геодезичну широту знаходять за допомогою послідовних наближень. Початкове наближення знаходять за формулою:
tgB0
Z 1 e' 2
![]() ,
,
D
(13.6)
а кожне наступне – за попереднім:
![]() 2
2
tgB'
Z Ne sin B0 ,
D (13.7)
![]() Наближення
виконують
з
точністю
до
1//.
Для
останнього
значення
широти
В
обчислюють
також
значення
N
(формула
13.3),
і,
використовуючи
це
значення,
обчислюють
геодезичну
висоту:
Наближення
виконують
з
точністю
до
1//.
Для
останнього
значення
широти
В
обчислюють
також
значення
N
(формула
13.3),
і,
використовуючи
це
значення,
обчислюють
геодезичну
висоту:
H D sec B' N
Z cos ecB'
N (1
e2 ).
(13.8)
Завдання 3. Перетворити координати референцної системи координат (просторові прямокутні) в геоцентричні в програмному продукті «Excel».
Вихідні дані
![]() 1
Лінійні
параметри
зміщення
початку
відліку:
1
Лінійні
параметри
зміщення
початку
відліку:
![]()
![]() x
=11м·n=
y
=-5м·n=
z
=2м·n=
x
=11м·n=
y
=-5м·n=
z
=2м·n=
![]() Кутові
параметри
позвороту
осей
систем:
Кутові
параметри
позвороту
осей
систем:
=-0,2’’·n=
=0,5’’·n=
=0,3’’·n=
![]()
![]()
![]() Робочі
формули
Робочі
формули
XYZ
р XYZ г
![]()
![]()
 X 1
X 1 ![]()
Y 1
X x
![]()
 Y y . (13.9)
Y y . (13.9)
Z
г ![]() 1
1
Z р z