

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИИ
ФГБОУ ВПО ТУЛЬСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Кафедра теоретической механики
КУРСОВАЯ РАБОТА
ПО РАЗДЕЛУ "ДИНАМИКА"
«ИССЛЕДОВАНИЕ КОЛЕБАНИЙ МЕХАНИЧЕСКОЙ
СИСТЕМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ»
Вариант № 1
Выполнил: студент гр. 121231с Ополовнин Н. С., шифр 140400
Научный руководитель: доцент
Тула, 2013
ОГЛАВЛЕНИЕ
АННОТАЦИЯ 3c
СХЕМА МЕХАНИЗМА И ДАННЫЕ ДЛЯ ВЫПОЛНЕНИЯ ЗАДАНИЯ 4c
1. ВЫВОД ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ДВИЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ ТЕОРЕМЫ ОБ ИЗМЕНЕНИИ КИНЕТИЧЕСКОЙ ЭНЕРГИИ МЕХАНИЧЕСКОЙ СИСТЕМЫ 5c
2. ОПРЕДЕЛЕНИЕ ЗАКОНА ДВИЖЕНИЯ СИСТЕМЫ 10c
3. ОПРЕДЕЛЕНИЕ РЕАКЦИЙ ВНЕШНИХ И ВНУТРЕННИХ СВЯЗЕЙ 12c
4. СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ДВИЖЕНИЯ МЕХАНИЗМА С ПОМОЩЬЮ ПРИНЦИПА ДАЛАМБЕРА-ЛАГРАНЖА 15c
5. СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ДВИЖЕНИЯ МЕХАНИЗМА С ПОМОЩЬЮ УРАВНЕНИЯ ЛАГРАНЖА 2-ГО РОДА. 19c
6. РЕЗУЛЬТАТЫ ВЫЧИСЛЕНИЙ 21c
7. АНАЛИЗ РЕЗУЛЬТАТОВ 27c
СПИСОК ЛИТЕРАТУРЫ 28c
Аннотация
В данной курсовой
работе исследуется механическая система
с одной степенью свободы, представляющая
совокупность абсолютно твёрдых тел,
связанных друг с другом посредствам
невесомых нерастяжимых нитей, параллельных
соответствующим плоскостям. Система
снабжена внешней упругой связью с
коэффициентом жёсткости с.
На груз действует возмущающая гармоническая
сила F(t)=F0•sin(pt).
Система
снабжена демпфирующим устройством, в
котором возникает сопротивление движению
моделируемое парой сил
 .
Трением качения и скольжения пренебрегаем.
Качение канатов происходит без скольжения,
проскальзывание нитей на блоках
отсутствует. Блок 2 считается невесомым.
Примененяя основные теоремы динамики
системы и аналитические методы
теоретической механики, определен закон
движения первого тела и реакции внешних
и внутренних связей.
.
Трением качения и скольжения пренебрегаем.
Качение канатов происходит без скольжения,
проскальзывание нитей на блоках
отсутствует. Блок 2 считается невесомым.
Примененяя основные теоремы динамики
системы и аналитические методы
теоретической механики, определен закон
движения первого тела и реакции внешних
и внутренних связей.
СХЕМА МЕХАНИЗМА И ДАННЫЕ ДЛЯ ВЫПОЛНЕНИЯ ЗАДАНИЯ
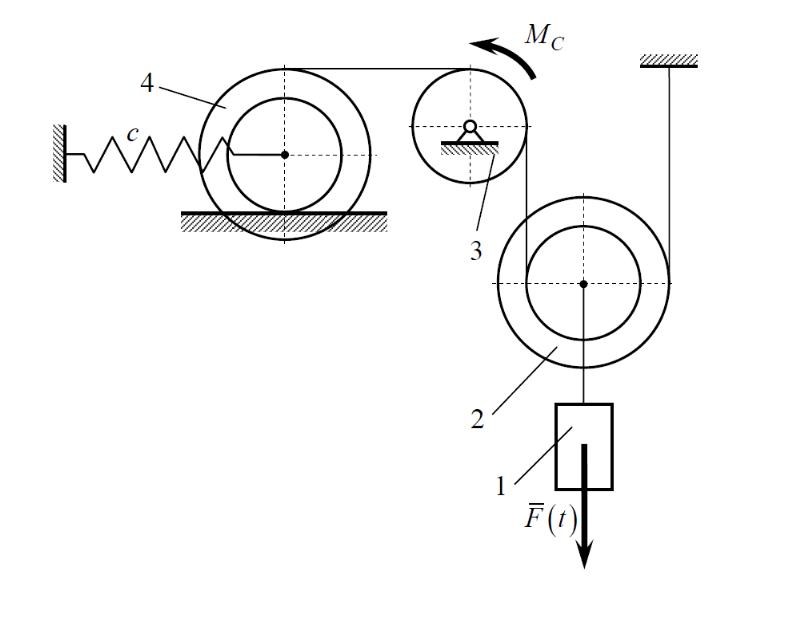
Дано:





Рис. 1. Схема механизма и исходные данные
1. Вывод дифференциального уравнения движения с использованием теоремы об изменении кинетической энергии механической системы
Расчётная схема представлена на рисунке 2, здесь обозначено:
Рис. 2.




Рассматриваемая механическая система имеет одну степень свободы. Будем определять ее положение с помощью координаты S. Начало отсчета координаты совместим с положением статического равновесия центра масс груза 1
Для построения дифференциального уравнения движения системы используем теорему об изменении кинетической энергии механической системы в форме:
 (1.1)
(1.1)
где Т - кинетическая энергия системы,
 - сумма мощностей
внешних сил,
- сумма мощностей
внешних сил,
 - сумма мощностей
внутренних сил,
- сумма мощностей
внутренних сил,
Вычислим, кинетическую энергию системы как сумму кинетических энергий тел, образующие механическую систему:

Груз 1 совершает
поступательное движение, его кинетическая
энергия: .
.
По условию задачи блок 2 считается невесомым, поэтому его кинетическая энергия T2 = 0.
Блок 3 совершает
вращательное движение, его кинетическая
энергия:
 .
.
где
 – момент инерции относительно центральной
оси блока,
– момент инерции относительно центральной
оси блока,
 – угловая скорость
блока.
– угловая скорость
блока.
Каток 4 совершает плоскопараллельное движение, его кинетическая энергия:
 ,
,
где Vc4 – скорость центра масс катка;
 – момент инерции
относительно центральной оси катка;
– момент инерции
относительно центральной оси катка;
 – угловая скорость
катка.
– угловая скорость
катка.
Кинетическая энергия всего механизма равна:
 (1.2)
(1.2)
Выразим
 через скорость груза 1:
через скорость груза 1:
 ,
,
 ,
,
 ;
;
 ,
(1.3)
,
(1.3)
 ;
;

 ;
;
 ,
,
.
Подставляя кинематические соотношения (1.3) в выражение (1.2), получаем:

или
 ,
(1.4)
,
(1.4)
где mпр – приведенная масса:
 ,
,


Найдем производную
от кинетической энергии по времени:
 .
.
Вычислим сумму
мощностей внешних и внутренних сил.
Мощность силы равна скалярному
произведению вектора силы на скорость
точки ее приложения:

Мощность, момента
силы равна алгебраическому произведению
момента силы на угловую скорость вращения
тела, к которому приложен момент:

Рассматриваемая
нами механическая система является
неизменяемой, т.е. тела, входящие в
систему, не деформируемы и скорости их
точек относительно друг друга равны
нулю. Поэтому сумма мощностей всех
внутренних сил будет равняться нулю:

Будут равняться
нулю мощности следующих внешних сил,
приложенных в точках, скорости которых
равны нулю: .
- Сумма мощностей остальных внешних
сил:
.
- Сумма мощностей остальных внешних
сил:
 ,
,

С учетом кинематических соотношений (1.3) сумму мощностей внешних сил определим:

или
 ,
,
где
 – приведенная сила.
– приведенная сила.
Упругую силу
считаем пропорциональной удлинению
пружины, которое равно сумме статического
λст
и динамического
 удлинений:
удлинений:

Так
как

 (1.5)
(1.5)
В
состоянии покоя системы приведенная
сила равна нулю. Полагая в (1.5)
 и
и
 ,
получаем условие равновесия системы:
,
получаем условие равновесия системы:

Отсюда статическое удлинение пружины равно:

Подставляя выражение (1.6) в (1.5), получаем окончательное выражение для приведенной силы:

Подставив выражения для производной от кинетической энергии и сумму мощностей всех сил с учетом (1.7) в уравнение (1.1), получаем дифференциальное уравнение движения системы:

или

где
 – приведенная жесткость пружины.
– приведенная жесткость пружины.
 – приведенный
коэффициент сопротивления.
– приведенный
коэффициент сопротивления.
Перепишем предыдущее уравнение в виде:

Где
 -
показатель степени затухания колебаний,
-
показатель степени затухания колебаний,
 –
частота свободных
колебаний.
–
частота свободных
колебаний.
Начальные условия
движения при t = 0: S = S0=
0,05м и
