

3. Микропроцессорная автоматизированная система управления частотой и активной мощности электроэнергетических систем.
В цифровой, как и в аналоговой АРЧМ, регулирующее воздействие на j-ю электростанцию формируется по интегральному соотношению

 (1)
(1)
где ∆f, ∆Р — отклонения частоты и перетока мощности от номинального и предписанного значений соответственно; Kfj, Kpj- — коэффициенты долевого участия j-й электростанции в покрытии изменений мощности, необходимых для восстановления частоты и допустимых по условию статической устойчивости перетока мощности.
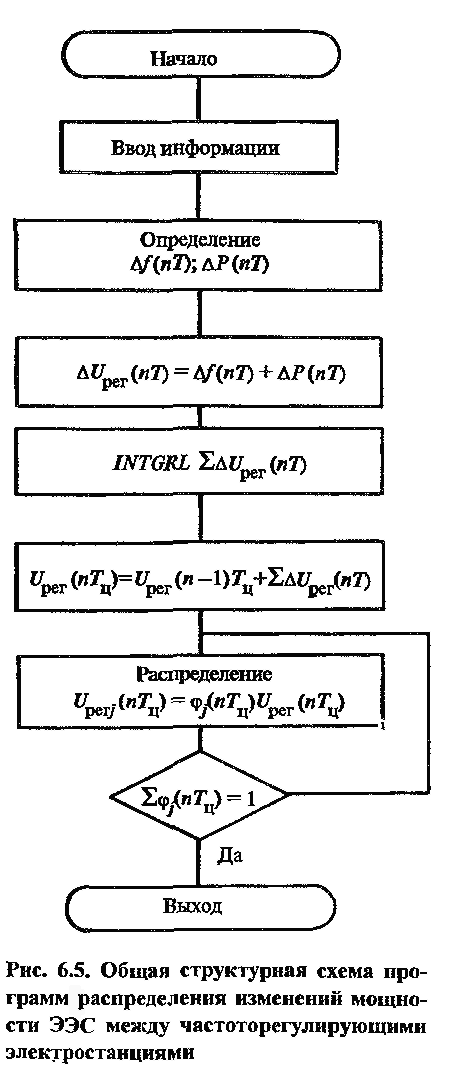
В разработанной ЦАРЧМ регулирование осуществляется дискретно во времени с циклом Тц= 1 с. Интегрирование согласно (1) естественно заменяется последовательным суммированием. При этом выполняется два вида расчетов: приращений ∆f(T), ∆Р(Т) за интервал Т дискретизации и накопленных сумм за цикл Tц регулирования. Рассчитанное воздействие Uрег(nTц) за n-й цикл распределяется между регулирующими электростанциями. В целом ЦАРЧМ функционирует по алгоритму, структурная схема которого в упрощенном виде представлена на рис. 6.5.
Основной алгоритм дополняется вспомогательными операциями, учитывающими:
возможности замены коэффициентов долевого участия функцией φj(nT) времени или режимных параметров;
ограничения по скорости изменений мощности и регулировочным диапазоном электростанций;
равенство сумм коэффициентов или значений соответствующих функций φj(nT), определяющих участие электростанции в регулировании, единице;
возможность ручной коррекции диспетчером регулирующих воздействий на электростанции и др.
4. Автоматические устройства повторного включения. Микропроцессорный комплект апв.
В системах электроснабжения устройство АВР контролирует положение выключателя рабочего источника питания и при его аварийном отключении включает резервный источник питания, а устройство АПВ действует на включение выключателя, например, линии электропередачи после отключения ее релейной защитой. При этом в отличие от релейной защиты, для которой воздействующая величина имеет обычно характер непрерывного сигнала, на вход УАВР и УАПВ подаются дискретные сигналы, несущие информацию о положении контролируемого выключателя. Поэтому в устройствах АВР и АПВ отсутствуют измерительные органы. Положение выключателя фиксируется его вспомогательными контактами, замкнутыми при одном положении выключателя и разомкнутыми при другом. В первом случае их сопротивление близко к нулю, а во втором — очень велико. Это сопротивление и является входным дискретным сигналом УАВР и УАПВ.
Микропроцессорное устройство защиты «Орион-РТЗ» (в дальнейшем – устройство), предназначено для выполнения функций релейной защиты, автоматики, управления и сигнализации присоединений напряжением 6–10 кВ, но может применяться и для других классов напряжения.
Устройство предназначено для работы на подстанциях с переменным оперативным током и может непосредственно работать с выключателями, катушки отключения которых включены «по схеме дешунтирования».
Устройство обеспечивает следующие эксплуатационные возможности:
– выполнение функций защит, автоматики и управления, определенных
ПУЭ и ПТЭ;
– задание внутренней конфигурации (ввод/вывод защит и автоматики, выбор защитных характеристик и т.д.) с помощью компьютера через канал связи;
– ввод и хранение уставок защит и автоматики;
– контроль и индикацию положения выключателя, а также контроль исправности его цепей управления;
– передачу параметров аварии, ввод и изменение уставок по линии свя-
зи;
– непрерывный оперативный контроль работоспособности (самодиагно
стику) в течение всего времени работы;
– блокировку всех выходов при неисправности устройства для исключе
ния ложных срабатываний;
– получение дискретных сигналов управления и блокировок, выдачу команд управления, аварийной и предупредительной сигнализации;
– управление аварийным отключением выключателя по схеме «дешунтирования» с помощью симисторов;
– гальваническую развязку всех входов и выходов, включая питание, для обеспечения высокой помехозащищенности;
– высокое сопротивление и прочность изоляции входов и выходов отно
сительно корпуса и между собой для повышения устойчивости устройства к перенапряжениям, возникающим во вторичных цепях КРУ.
Функции автоматики, выполняемые устройством:
– операции отключения и включения выключателя по внешним командам с защитой от многократных включений выключателя;
– одно- или двукратное АПВ;
– формирование сигнала пуска МТЗ для организации логической защи-
ты шин;
– отключение и включение выключателя по внешним сигналам АЧР и ЧАПВ.
5. Микропроцессорная автоматика предотвращения нарушения устойчивости Наиболее сложная общесистемная иерархически построенная автоматика предотвращения нарушения устойчивости (АПНУ) эффективно выполняет функции на основе циклически (через несколько десятков секунд) производимых универсальными мини- и микроЭВМ расчетов динамической и статической устойчивости для всех фиксируемых возмущающих воздействий с учетом их тяжести и параметров электрических режимов работы электроэнергетических систем (исходного нормального и послеаварийного) и протекания электромеханического переходного процесса. На основе расчетов определяется набор и интенсивности противоаварийных управляющих воздействий – автоматическое дозирование воздействий (АДВ) и их запоминание (АЗД) до окончания следующего цикла расчетов.
Применение цифровых ЭВМ для автоматического дозирования противоаварийных управляющих воздействий обеспечивает необходимое соответствие их интенсивности возмущающим воздействиям и позволяет взаимную координацию между устройствами АДВ иерархических комплексов АПНУ электроэнергетических систем, их объединений и ЕЭС в целом.
Дозированные противоаварийные управляющие воздействия вырабатываются в общем случае на основе полиномиальных алгоритмов и в соответствии с разработанными методами определения возможных областей устойчивости в координатах режимных параметров и коэффициентов настройки автоматических регуляторов, их анализа по критериям устойчивости. Производится проверка сохранения устойчивости при реализации выработанных воздействий. Выбор из возможных вариантов наборов и интенсивности управляющих воздействий производится итеративно с последовательным их перебором.
Программа вывода принятого варианта дозированных управляющих воздействий и передачи их в устройства АЗД запускается после каждого из циклов расчетов.