

2. Оценка динамической устойчивости системы электроснабжения методом площадей.
При выполнении
приближённого расчёта по формуле
строятся угловые характеристики мощности
при Е'=const.
Генератор вводится в схему замещения
своим переходным сопротивлением X'd.
Взаимное сопротивление
![]() определяется с учётом сопротивления
аварийного шунта Х(n),
зависящего от вида КЗ.
определяется с учётом сопротивления
аварийного шунта Х(n),
зависящего от вида КЗ.
Нормальный режим.
![]()
![]()
аварийный
![]()
![]()
Проведя те же преобразования, что и первом аварийном режиме, получим суммарное сопротивление Хш2.
![]()
![]()
Послеаварийный режим.

![]()
![]()
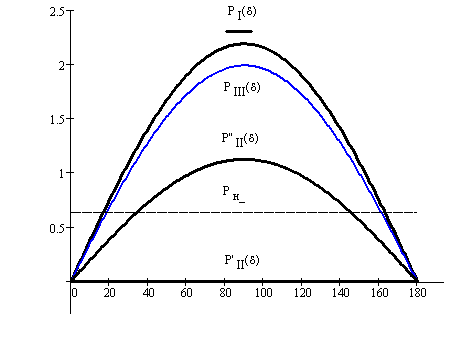 По результатам
вычислений строим характеристики
нормального PI,
первого P`II
и второго аварийного P``II
и послеаварийного PIII
режимов. Исходя из равенства площадок,
характеризующих избыточные кинетические
энергии ускорения и торможения, определим
предельный угол отключения КЗ пр.откл
По результатам
вычислений строим характеристики
нормального PI,
первого P`II
и второго аварийного P``II
и послеаварийного PIII
режимов. Исходя из равенства площадок,
характеризующих избыточные кинетические
энергии ускорения и торможения, определим
предельный угол отключения КЗ пр.откл
![]() . По отношению
площадки возможного торможения к
площадке фактического ускорения
оценивается запас динамической
устойчивости:
. По отношению
площадки возможного торможения к
площадке фактического ускорения
оценивается запас динамической
устойчивости:
 .
.
3. Статическая устойчивость узла нагрузки. Статическая устойчивость синхронных и асинхронных двигателей в узлах нагрузки.
Статическая устойчивость узла электрической нагрузки - способность возвращаться к исходному установившемуся режиму после малых неограниченных по времени возмущений. Под малым возмущением понимается такое, при котором изменения параметров несоизмеримо малы по сравнению со значениями этих параметров.
Стат. уст. асинхрон. двиг.
Для асинхронных двигателей (или их эквивалента) основным условием нарушения устойчивости является граничное равенство
d(M-Mмх)/ds=0
При Mмх = const и непосредственном подключении двигателей к шинам узла нагрузки критические параметры, соответствующие предельному режиму его статической устойчивости, определяются выражениями
Sкр=r2/(xs+xэк); Pmax=Uc2/(2(xs+xэк))
Стат. уст. синхрон. двиг.
Статическая устойчивость синхронных двигателей, подключенных к узлу нагрузки с неизменными значениями напряжения и частоты, нарушается при граничном условии
d(M-MMX)/dδ=0
4 Устойчивость при самозапуске двигателей нагрузки
Самозапуск проходит тем тяжелее, чем больше электроснабжение. Если к моменту восстановления питающего напряжения двигатели нагрузки успевают остановиться, условия самозапуска оказываются самыми трудными: они соответствуют одновременному пуску всех двигателей. В этом случае на питающих шинах узла нагрузки (рисунок 33) устанавливается напряжение
![]() (60)
(60)
где U0 - напряжение системы (ШБМ);
хΣН - результирующее сопротивление заторможенных элементов нагрузки.
![]() ,
где хс
- сопротивление связи питающих шин
нагрузки с системой.
,
где хс
- сопротивление связи питающих шин
нагрузки с системой.
 Рисунок
33 – узел нагрузки
Рисунок
33 – узел нагрузки
Токи отдельных
двигателей (как асинхронных, так и
синхронных) можно найти согласно ![]() (61)
(61)
где хm - реактивное сопротивление «m»-го двигателя.
Пусковые моменты двигателей определятся по формуле
![]() (62)
(62)
где Rm - активное сопротивление заторможенного ротора «m»-го двигателя.
Если пусковые моменты всех двигателей оказываются меньшими, чем моменты сопротивления их рабочих механизмов, то одновременный самозапуск невозможен и двигатели нужно вводить в работу поочередно. Если же для отдельных двигателей Мmп>М0, то они развернутся. Тогда нужно рассчитать параметры их установившегося после разгона режима и, повторив расчет напряжения на питающих шинах в этом новом режиме, найти новые значения токов машин и возможность самозапуска очередных двигателей. И так далее.
Расчет усложняется, если в течение периода потери питающего напряжения двигатели успевают затормозиться лишь частично. Тогда нужно рассчитать их скорости к моменту восстановления напряжения, на их основе определить текущие значения параметров двигателей, по которым рассчитать напряжение на питающих шинах и токи двигателей в этот начальный момент времени. Затем определяются мощности на валах двигателей, их превышения над моментами сопротивлений рабочих механизмов. Методом последовательных интервалов определяют приращения скоростей двигателей на первом интервале времени, после чего находят скорости в конце первого (начале второго) интервала времени, соответствующие им новые значения параметров двигателей и т. д. Такие расчеты производят, как правило, на ЭВМ.