

Домкраты
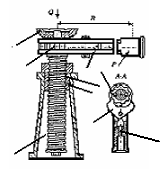
Винтовые домкраты: 1 - литой или сварной корпус;2 - стальной винт; 3 – оголовок; 4 – трещотка; 5 – гайка; 6 – рукоятка; 7 - двусторонняя собачка; 8 – пружина; 9 - храповое колесо.
Усилие, необходимое для вращения винта домкрата, нагруженного грузом Q, равно:
при подъеме
Pп = Q*r/k*tg*(ρ+α);
при спуске
Pсп = Q*r/l*ng*(ρ-α),
где Q- вес поднимаемого груза; r- средний радиус нарезки винта, мм; l- длина рукоятки, к которой приложено усилие, мм; ρ- угол трения в резьбе; α- угол подъема винтовой линии, град.
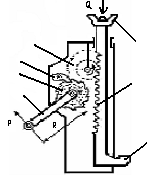
Реечные домкраты: 1 – корпус; 2 – рейка; 3 – оголовок; 4 – лапа; 5- рукоятка; 6 – собачка; 7 - храповое колесо.
Усилие на рукоятке с плечом l в мм, необходимое для перемещения рейки, нагруженной силой Q (вес груза).определяется по формуле:
P = Q*d3/2i*l*1/η,
где d3- диаметр шестерни, передающей усилие на рейку, мм; i- передаточное число зубчатой передачи; η-к.п.д. передачи.
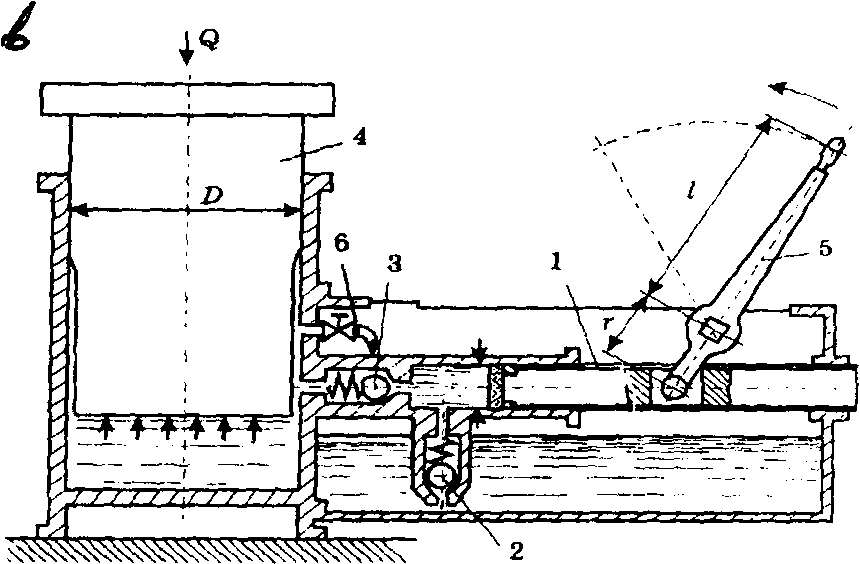
Гидравлические домкраты: 1 - цилиндр домкрата; 2,7 - клапанные устройства; 3 - плунжерный насос; 4,8 – поршень; 5 – рукоятка; 6 - насосное отделение; 9 - отверстие.
Подъемная сила гидравлического домкрата:
Q = P*L/l*D2/d2*η,
где P- усилие рабочего на рукоятке, кгс; L- длина рукоятки, см; l- плечо толкателя плунжера, см;
D- диаметр поршня домкрата, см; d-диаметр поршня плунжерного насоса, см;
η-к.п.д., составляющий 0,8-0,9.
Тали
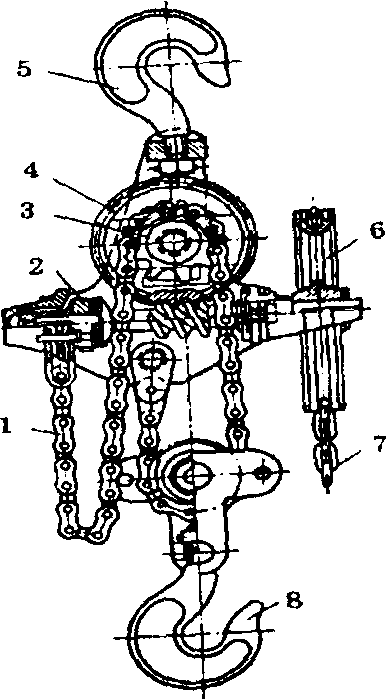
Ручная таль: 1 - цепь подъема груза; 2 - тормозное устройство; 3 - звездочка; 4 – червячное колесо; 5 – крюк; 6 - приводное колесо; 7 - цепь привода тали; 8 - грузовой крюк.
Ручные тали выпускаются грузоподъемностью до 5 m, коэффициент полезного действия их 0,7 – 0,8.
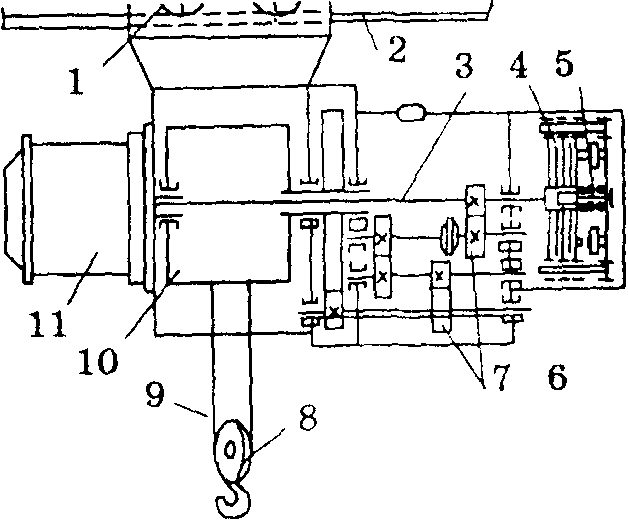
Электротельфер: 1 – каретка; 2 – монорельс; 3 – вал; 4 – дисковой тормоз; 5 – пружина; 6 – электромагнит; 7 – редуктор; 8 – крюковая обойма; 9 – канат; 10 – барабан; 11 – электродвигатель.
Тельфер грузоподъемностью до 0,5 m передвигается по рельсу вручную; грузоподъемностью от 1 до 3 m – на четырехколесной ходовой тележке с помощью двигателя. Тельфер грузоподъемностью 5 m передвигается на двух ходовых тележках, из которых одна приводная. Основные показатели электротельферов следующие: грузоподъемность 0,25- 5 m; высота подъема груза 6 – 18 м, а иногда и более, скорости подъема груза 0,13 и передвижения 0,5 м/с.На тельферах применяются двигатели переменного тока. Ток к ним подводится контактными проводами или гибким кабелем.
Практическая работа № 6 Башенные и козловые краны
Б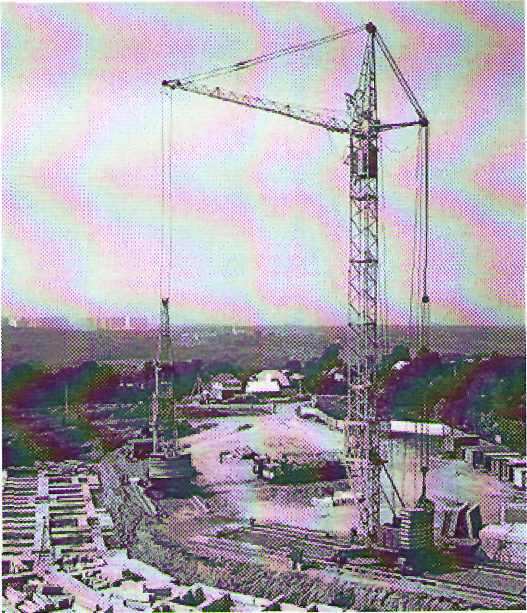 ашенный
кран КБ-405.
ашенный
кран КБ-405.
 Кран
козловой ККД с крюком
Кран
козловой ККД с крюком

Башенный кран ТС5013 (QTZ63)
Тема: «Изучение устройства и работы башенного и козлового кранов».
ЗАДАНИЕ:
Вычертить кинематические схемы башенных кранов.
Описать работу и устройство башенных кранов.
Вычертить общий вид и схемы запасовки канатов козлового крана.
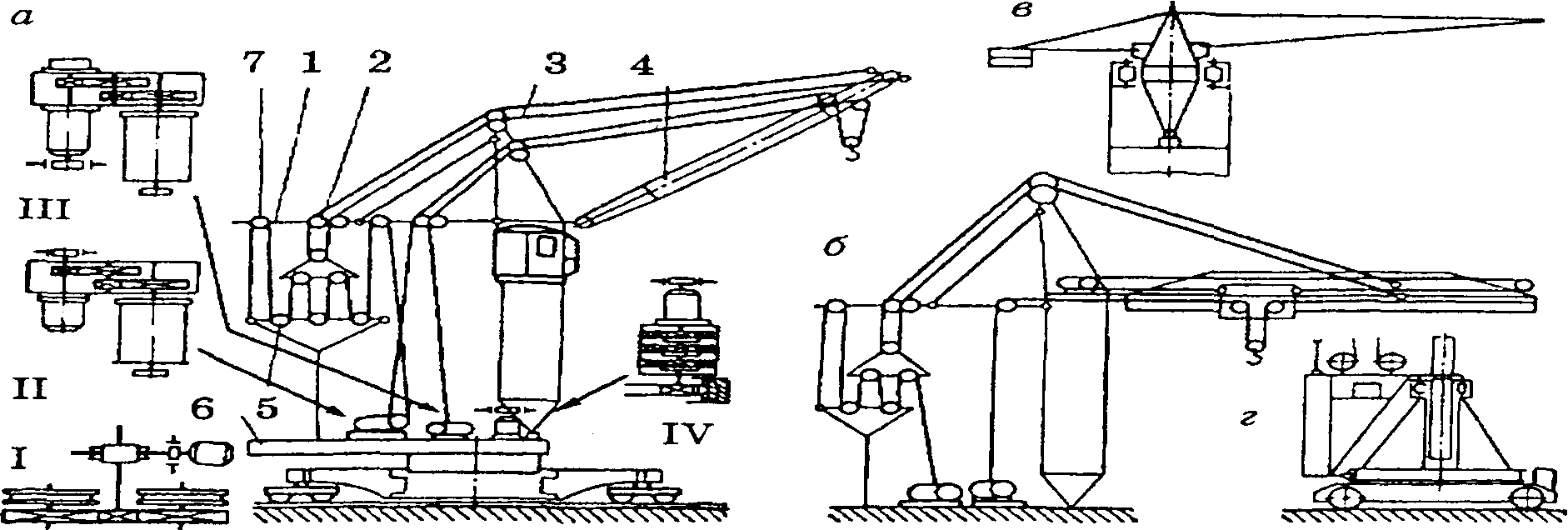
Рис.1 Кинематические схемы башенных кранов:
а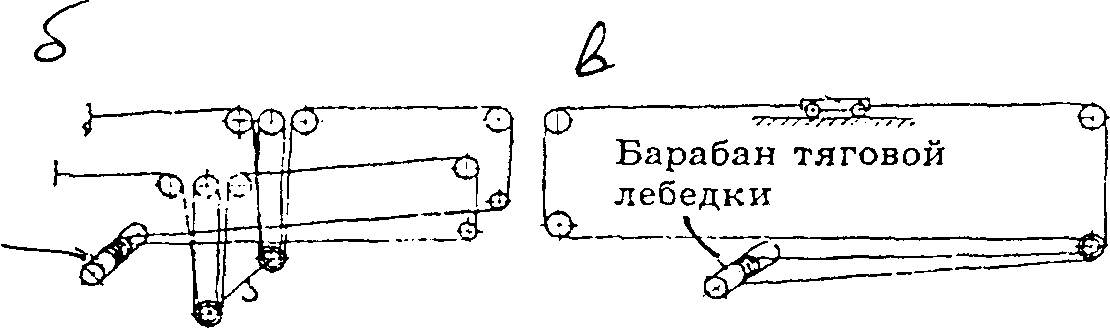 — с подъемной стрелой и поворотной
платформой; б — с балочной
стрелой; в — схема
поворотного оголовка; г —
схема поворотной башни механизма
привода; I — передвижение
крана; II —лебедки подъема
груза; III — лебедки подъема
стрелы; IV — механизм
поворота башни со стрелой или стрела.
— с подъемной стрелой и поворотной
платформой; б — с балочной
стрелой; в — схема
поворотного оголовка; г —
схема поворотной башни механизма
привода; I — передвижение
крана; II —лебедки подъема
груза; III — лебедки подъема
стрелы; IV — механизм
поворота башни со стрелой или стрела.
Рис.2
На рис.2 показана схема запасовки канатов. Стрела поднимается лебёдкой и стреловым полиспастом. Наиболее типична следующая схема запасовки канатов. Канат 3 прикреплён к концу каната 4 и огибает блок 2, закреплённый на подвижной обойме ( траверсе ) 1, несущей два блока. Полиспаст подъёма стрелы четырёхкратный. Три блока полиспаста находятся на неподвижной обойме 5, жёстко прикреплённой к поворотной платформе 6. Один конец каната подъёма стрелы жёстко закреплён на той же неподвижной обойме и перекинут через неподвижный блок 7. Другой конец закреплён на стреловой лебёдке.
Башенные краны различаются:
1). По вылету стрелы - на краны с подъёмной стрелой (а), у которых изменение вылета стрелы осуществляется её наклоном. И краны с консольной стрелой, вдоль которой перемещается грузовая тележка (б). Краны, у которых вылет стрелы осуществляется наклоном стрелы, просты по конструкции. К их недостаткам надо отнести то, что нельзя полностью использовать подкрановое пространство. Наименьший вылет стрелы составляет 30% от наибольшего; при таком её креплении трудно достигнуть точной наводки элементов конструкции, так как при подъёме или опускании стрелы груз перемещается в вертикальном, так и в горизонтальном направлениях;
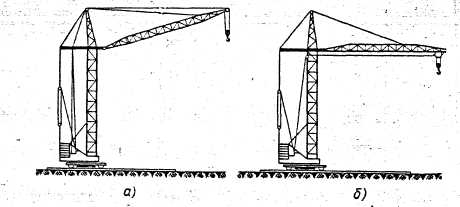
Рис.3
2). По способу поворота стрелы – на краны, у которых стрела закреплена на поворотном оголовке, установленном на неповоротной башне (в); краны, у которых стрела закреплена на башне, а башня установлена на поворотной платформе и может поворачиваться вокруг своей оси (а); краны с поворотной башней (г).
3) По устройству ходовой части: а) краны, перемещающиеся только по прямолинейным путям, и б) краны, перемещающиеся как по прямолинейным, так и по криволинейным путям.
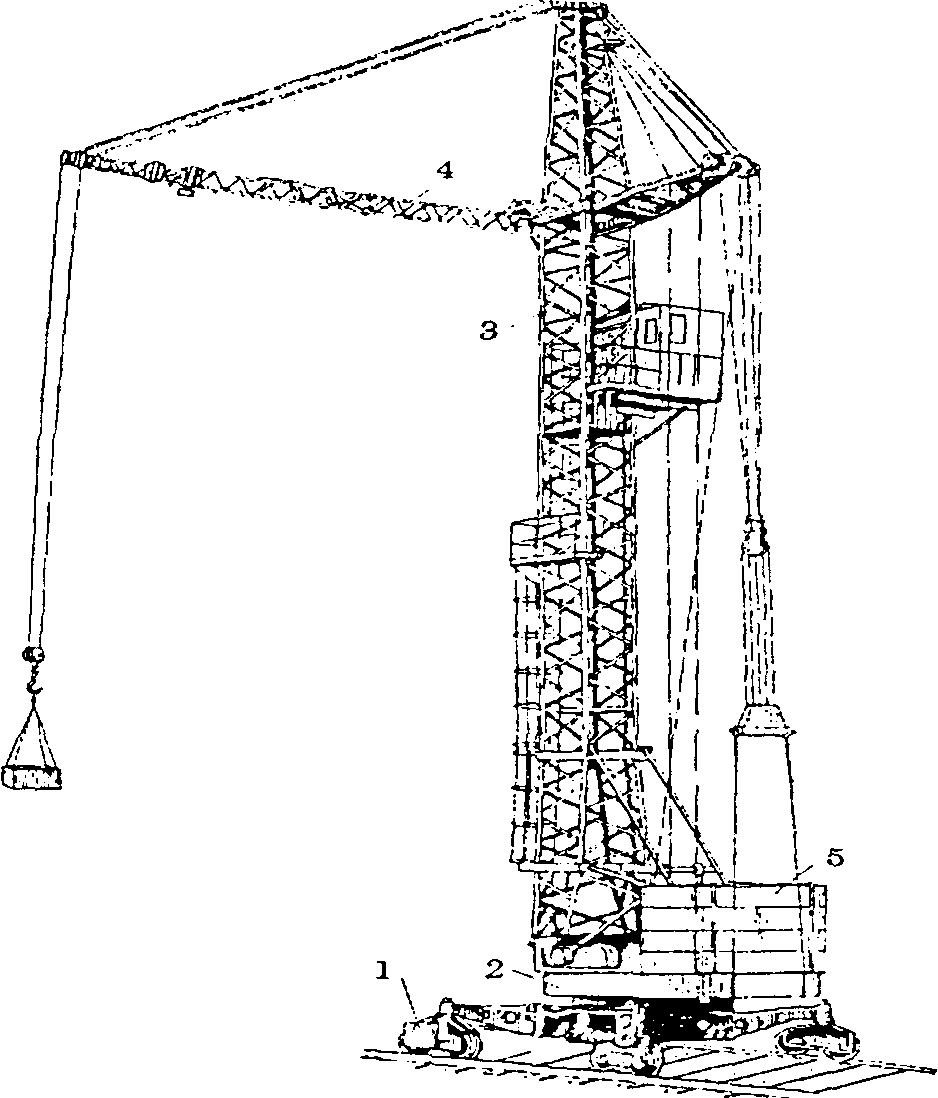
Башенный кран (рис.4) состоит из башни(3), закрепленной на поворотной платформе(2), ходовой тележки(1), стрелы(4), которая крепится к башне, противовеса(5), а также механизмов подъёма и опускания груза, подъёма и опускания стрелы, поворота башни вместе со стрелой, механизма перемещения крана, системы управления.
Рис.4
В грузоподъёмном механизме применяются обычные электрореверсивные лебёдки. В механизмах подъёма стрелы лебёдки обычно имеют червячные передачи.
В последние годы все большее распространение получают краны с поворотной башней. Все механизмы такого крана располагаются на поворотной платформе. На ней же укладывается противовес. При такой конструкции снижается общий центр тяжести крана, что приводит к уменьшению веса крана, к улучшению условий транспортирования и монтажа, к уменьшению амплитуды раскачивания башни, а следовательно, и груза.
Краны перемещающиеся по рельсам при работе на открытом воздухе, башенные краны оборудуются противоугонными захватами с ручным приводом или автоматическими.
Управление башенным краном осуществляется обычно из кабины. Наиболее рациональное дистанционное управление башенными кранами с двух пунктов: от строповщика, от находящегося на земле приёмщика груза.
Поворотные механизмы (рис.5) применяются двух типов- с цевочным колесом а) и с канатным приводом б).
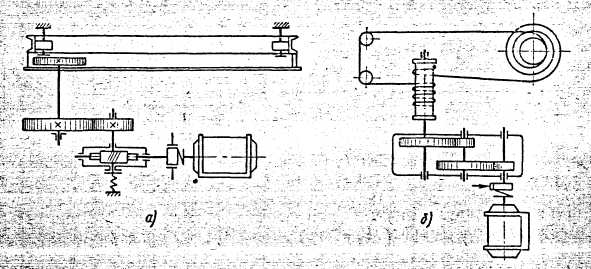
Рис.5