

40.Замкнутная система автоматизированного управления
электроприводом с асинхронным двигателем и тиристорным
регулятором напряжения: тиристорный регулятор предназначен
для регулирования U на статоре дв. перемен. Тока. Применяется
для регулирования скорости АД с фазным ротором,
а также в качестве уст-ва плавного пуска Ад.


1-усилитель,2-сифу,br-тахогенаратор.Регулирование
напряжение осуществляется путем изменения альфа.
чем больше альфа.тем меньше U на статоре дв.
и меньше его скорость.недостатком
явл несинусоидальность питающего U
41:Замкнутая система автоматизированного управления электроприводом

с ад и тиристорным преобразователем частоты. 1-задатчик скорости.
2-блок ограничения U, 3-Регулятор U 4-регулятор тока. ПЧ-преобразователь
частоты.5-выпрямитель 6.-реостатное звено.
7-управляющий инвертор. 8-датчик I, 9-датчик U
Схема содержит преобразователь частоты со звеном постоянного тока.
Скорость двигателя регулируется изменением частоты управляемого инвертора.
Блок защиты U обеспечивает пропорциональное регулирование
U в зоне 1 хар-ки и ограничения U в зоне Z. При задании с
корости ниже номинальной блок ограничения обеспечивает
регулирование U прямопропорционально изменению частоты.
Схема регулирования выполнена по принципу
подчиненного регулирования.Внутренний контур тока
с датчиком и регулятором.Внешний контур U со
своим датчиком и регулятором. Схема обеспечивает
поддержание заданного уровня U на дв.
42:Замкнутая система имульсное регулирование: метод управления
частотой вращения или вращающим моментом электродвигателей,
основанный на периодическом изменении параметров цепей
двигателя или схемы его присоединения к источнику энергии..
в схеме осущ импульсное регулирование сопртивл. в цепи ротора АД.
При увеличении скорость умен,а при уменьшении сопротив., скорость
увеличивается.1-усилитель,2-импульсные генератор,3-электромагнит
ключа,br –тахогенератор,Кзв-задатчик скорости.Uна входе усилетля=Uзв-Uосс.
Принцип дейсивия основан в регулировании времени открытого
состояния электрон. ключа. Если ключ открыт –то сопротивление в цепи
ротора равно 0.а если ключ закрыт-то в цепи ротора действует Rрег.
Генератор вырабатывает импульс управления ключом с постоянным
периодом Т=const.А длительность импульса зависит от скорости вращения.
Чем шире импульс,тем меньше эквивалентное сопротивление
в цепи ротора и дв. работает на более жесткой мех характеристике.

43:Структурная схема следящего электропривода.
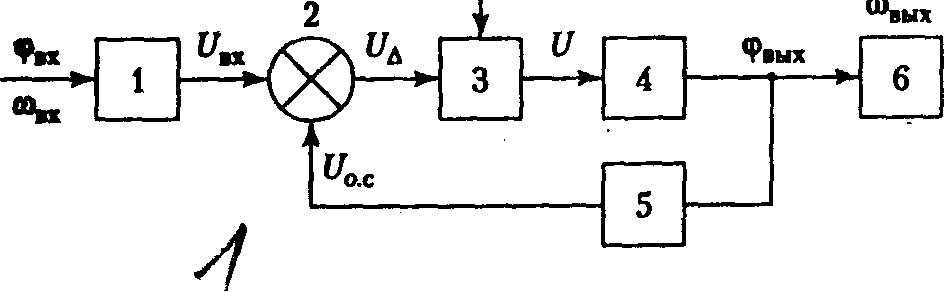
Следящий электропривод состоит из датчика входного
сигнала 1 и датчика 5 выходной координаты, измерителя рассогласования 2,
системы управления 3 и электродвигателя с механической передачей 4,
которая приводит в движение исполнительный орган 6 рабочей машины.
Датчики входной и выходной величин преобразуют механические величины
(скорость или угол поворота вала) в электрические —
входной сигнал Uвх и сигнал обратной связи Uос.
Измеритель рассогласования 2, алгебраически суммируя эти сигналы,
вырабатывает сигнал рассогласования U∆, поступающий в
систему управления 3. Следящий электропривод по своей
структуре представляет собой замкнутую систему, действующую по
принципу отклонения.Система управления 3 состоит из регулятора (усилителя)
и силового преобразователя, которые обеспечивают необходимое
преобразование сигнала рассогласования U∆ в напряжение U,
поступающее на двигатель. За счет выбора схем регулятора и
преобразователя, или введения корректирующих устройств,
обеспечивается необходимый закон изменения этого напряжения
во времени U(t) при отработке входного воздействия
.Различают следящие электроприводы с непрерывным и прерывным управлением;
последние, в свою очередь, делятся на релейные и импульсные.
44. Следящий эл привод релейного действия
Электропривод обеспечивает прерывистое управление механизма.
(двигатель постоянного тока последовательного возбуждения М,
имеющий две обмотки возбуждения ) Напряжение на двигателе
подается только в случае если отклонение механизма от заданного
положение механизма превышает заданный допуск.1-усилитель
2,4-пороговый элемент; 3,5-электронный ключ,6-механизм;7-редуктор.
Rзп –реостатный задатчик положения. Rдп-реостатный датчик
положения механизма. М-дпт,LM1-обмотка возбуждения «вперед»
LM2-«назад».Перемещение мех.осущ. дв. постоян. Тока.
Включение схемы дв.осущ. эл.ключом. Ключ открывается сигналом
порогового элемента.Пороговый элемент вырабатывает U
управление ключом, только если Uна его входе,превышает U
порога срабатывания. U мех.контролир. реостатным датчиком.
U=Uзп-Uдп.На выходе усилителя формируется Uупрвления ,включение дв.

45: Следящий электроприводах непрерывного действия .напряжение,
пропорциональное сигналу рассогласования, постоянно подается на двигатель.

Этот тип привода состоит из датчика 1 и 2 приемника,
состовляющих измеритель рассоглосования,усилителя
3 и 4 исполнительного двигателя, механически связанного с
производственным мезанизмом РМ; исполнительный двигатель
связан с приемником через передачу s(здесь в качестве датчика
используются обычно сельсины,работающ в трансформаторном режиме)
Принцип работы:при повортое ротора датчик 1 в однофазной обмотке
сельсина приемника 2 наводится ЭДС,которое воздействует на усилительное
ус-во 3.Ус-во вкл. Дв. 4 приводит в действие приводит в работу
производственный механизм и одновременно
через передачу 5-ротор сельсина приемника 2.