

Л
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ТВЕРДЫХ ТЕЛ
ЦЕЛЬ РАБОТЫ
Определение моментов инерции набора тел. Проверка теоремы Гюйгенса - Штейнера.
ПРИБОРЫ И ПРИНАДЛЕЖНОСТИ
Трифилярный подвес, крутильный (торсионный) маятник, грузы, секундомер, штангенциркуль, весы.
ТЕОРЕТИЧЕСКАЯ ЧАСТЬ
Как известно из динамики, момент инерции - это физическая величина, характеризующая распределение масс в теле относительно оси вращения и являющаяся мерой инертности тела при вращательном движении.
М
 на
квадрат расстояния
на
квадрат расстояния
 ,
до этой оси:
,
до этой оси:
 =
Δ
=
Δ
 (6.1)
(6.1)
Поскольку масса реального тела представляет сумму составляющих его масс материальных точек, то момент инерции тела J есть совокупность моментов инерции материальных точек:

(6.2)
Момент
инерции твердого тела относительно
некоторой оси OO´
проходящей
через его центр масс, равен сумме моментов
инерции всех точек тела относительно
этой оси (рис. 6.1).
Единица измерения момента инерции в СИ
- кг м2.
м2.
При непрерывном распределении масс сумма (6.2) сводится к интегралу
J
=
 dm,
(6.3)
dm,
(6.3)
где интегрирование проводится по всему объему тела. Поскольку dm = ρdV, то момент инерции тела, имеющего плотность ρ, вычисляется по формуле
J= dV,
(6.4)
dV,
(6.4)
где dV- элемент объема. Как видно из формул (6.1) - (6.4), момент инерции относительно данной оси, как и масса, тела не зависит от характера движения. Он определяется размерами, формой и плотностью тела.
Для тел правильной геометрической формы интегрирование дает следующие результаты для моментов инерции, вычисленных относительно оси, проходящей через центр симметрии этих тел (рис. 6.2). Здесь r - радиус соответствующих тел; т - их масса.
Если необходимо рассчитать момент инерции тела относительно оси АA', проходящей не через центр симметрии, а параллельно ей (рис. 6.3), то используют теорему Гюйгенса- Штейнера:
J=J0 + md2, (6.5)
где т - масса тела; d- расстояние между осями.
Если момент инерции относительно оси, проходящей через центр масс равен Jo, то момент инерция тела относительно любой другой оси, параллельной первой, равен моменту инерции Jo этого тела относительно оси ОО', сложенному с величиной md2.
Основной закон динамики вращательного движения имеет вид:
 =
=
 (6.6)
(6.6)
где
-
величина суммарного момента внешних
сил, действующих на тело;
 - угловая скорость тела. Если
=
- угловая скорость тела. Если
= 0, то J
= const.
Величина
0, то J
= const.
Величина
 =
J
называется
моментом импульса твердого тела. Таким
образом, если момент сил, действующих
на тело, равен нулю, т. е. система замкнута,
и тело будет покоиться или вращаться
бесконечно долго, сохраняя постоянный
момент импульса. Это утверждение,
в сущности, является одной из
формулировок закона сохранения момента
импульса:
=
J
называется
моментом импульса твердого тела. Таким
образом, если момент сил, действующих
на тело, равен нулю, т. е. система замкнута,
и тело будет покоиться или вращаться
бесконечно долго, сохраняя постоянный
момент импульса. Это утверждение,
в сущности, является одной из
формулировок закона сохранения момента
импульса:
 =
const
при
=
=
const
при
=
 =0.
(6.7)
=0.
(6.7)
В
случае вращательного движения момент
инерции J
играет
ту же роль, что и масса т
при поступательном движении, а угловая
скорость
- роль линейной скорости
 .
.
В табл. 6.1 сопоставлены величины и соотношения, являющиеся эквивалентными при поступательном и вращательном движении тела. Видно, что момент инерции J является важной характеристикой вращательного движения, количественная информация о которой необходима при решении различных задач.
Таблица
6.1

Момент инерции тел правильной геометрической формы может быть вычислен теоретически по формулам (6.2), (6.4) и (6.5). В случаях, когда аналитическое определение момента инерции затруднено сложностью формы тела или неоднородностью распределения массы (маховое колесо, коленчатый вал, винт и др.), его определяют опытным путем, что является одной из целей настоящей работы.
Имеются разные способы определения этой величины. В данной работе рассматриваются методы определения моментов инерции твердых тел с помощью трифилярного подвеса и крутильного (торсионного) маятника, а также компьютерный вариант определения момента инерции однородного диска.
Вариант 1
Определение моментов инерции твердых тел и проверка теоремы гюйгенса - штейнера с помощью трифилярного подвеса
Описание рабочей установки и метода измерения
Одним из методов экспериментального определения момента инерции является метод крутильных колебаний трифилярно подвешенного диска (трифилярного подвеса).
Трифилярный подвес состоит из большого диска Р, массой т, радиусом R (рис. 6.4), подвешенного на трех симметрично расположенных капроновых нитях, и малого неподвижного диска Р' радиусом r, укрепленного на кронштейне. При повороте нижнего диска Р вокруг вертикальной оси OO' на некоторый угол а возникает момент сил, стремящийся вернуть диск в положение равновесия. Диск Р начнет совершать крутильные колебания относительно оси OO'. Если угол α мал (α =1-5°), в этом случае можно считать, что диск совершает гармонические колебания.
Рис.
6.4
α
= α0sin( t+
t+
 0).
(6.8)
0).
(6.8)
Очевидно,
что период колебаний подвеса будет
зависеть от момента инерции системы
(нижний диск и какое-либо тело на нем),
а также от различных постоянных для
данного трифилярного подвеса величин
(длины нитей
 ,
радиусов верхнего и нижнего дисков r
и R).
,
радиусов верхнего и нижнего дисков r
и R).
Воспользуемся
законом сохранения энергии для того,
чтобы найти связь периода колебаний
трифилярного подвеса с его моментом
инерц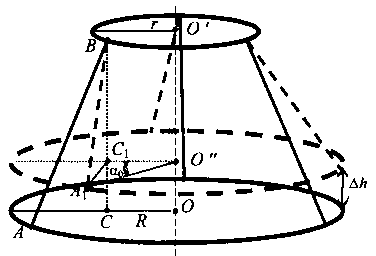 ии.
При повороте нижнего диска Р
на некоторый угол αо
относительно положения равновесия
он поднимается на высоту Δh
= h1
- h2
(рис.
6.5), при этом приращение потенциальной
энергии равно:
ии.
При повороте нижнего диска Р
на некоторый угол αо
относительно положения равновесия
он поднимается на высоту Δh
= h1
- h2
(рис.
6.5), при этом приращение потенциальной
энергии равно:
ΔEпот = mgΔh. (6.9)
При вращении диска в другую сторону потенциальная энергия переходит в кинетическую энергию вращательного движения.
Екин
= J
J (6.10)
(6.10)
где J - момент инерции платформы; ω - угловая скорость платформы.
В момент прохождения положения равновесия кинетическая энергия принимает максимальное значение. Тогда, пренебрегая работой сил трения, на основании закона сохранения механической энергии имеем:
mgΔh = J max, (6.11)
где
 - угловая скорость платформы в момент
достижения положения равновесия.
- угловая скорость платформы в момент
достижения положения равновесия.
Считая, что платформа совершает гармонические колебания согласно (6.8), можно найти угловую скорость, взяв производную от α
ω
=
 =
= cos(
cos( )
(6.12)
)
(6.12)
В
нашем случае =
=
 ,
так как при t
=
0 α = α0.
,
так как при t
=
0 α = α0.
В момент прохождения через положения равновесия
(t
=
 T,
T,
 Т
,
Т
, Т
,
Т
, Т
и т.д.) абсолютное значение этой величины
будет
Т
и т.д.) абсолютное значение этой величины
будет
= . (6.13)
. (6.13)
На основании выражений (6.9), (6.10) и (6.11), (6.13)
mg Δh = J ( ) 2 (6.14)
Из рис. 6.5 видно, что Δh можно выразить через параметры трифилярного подвеса:
R - радиус диска платформы;
- длина нитей подвеса; r - радиус верхнего диска.
Δh
= =
=
 =
= .
.
но (ВС)2 = (АВ)2 – (AC) 2= 2-(r- R)2,
(ВС1)2 = (А1В)2 - (A1C1)2 = 2-(R2 + r2 - 2R r cos α0),
следовательно,
Δh
=
 =
=
 .
.
При
малых углах отклонения sin
 можно
заменить углом α,
а ВС
+ ВС1=
2
и получим:
можно
заменить углом α,
а ВС
+ ВС1=
2
и получим:
Δh
=
 .
(6.15)
.
(6.15)
Подставляя (6.15) в (6.14), можно записать:
mg
=
J .
.
Откуда
J
=
 . (6.16)
. (6.16)
Учитывая, что параметры (R, r, ) во время опыта не изменяются, формулу (6.16) удобно записать в виде
J = k т Т2, (6.17)
где
k
= .
.
Формула позволяет вычислить момент инерции платформы с телом и без по измеренной величине периода Т.