

2. Операторные уравнения и передаточные функции системы. Структурная схема сар.
2.1. Дифференциальные уравнения звеньев в изображениях по Лапласу при нулевых начальных условиях.
Уравнения динамики элементов системы имеют вид:
а) датчика скорости
![]() , (2.1)
, (2.1)
б) сравнивающего устройства (на входе У)
![]() , (2.2)
, (2.2)
в) усилителя
![]() , (2.3)
, (2.3)
г) преобразователя
![]() , (2.4)
, (2.4)
д) силовой цепи "преобразователь-двигатель"
![]() , (2.5)
, (2.5)
е) уравнение механического движения
![]() , (2.6)
, (2.6)
Из уравнений (2.1-2.6) получим дифференциальные уравнения звеньев в изображениях по Лапласу при нулевых начальных условиях.
,
(2.7)
,
(2.8)
(
,
(
,
,
(2.11)
,
(2.12)
2.2. Передаточные функции звеньев системы.
Из уравнения (2.9) получим передаточную функцию первого звена
(2.13)
.![]()
Первое звено – идеальное усилительное звено.
Из уравнения (2.10) получим передаточную функцию второго звена
(2.14)![]()
.
Второе звено – апериодическое звено первого порядка.
Из уравнения (2.11) получим передаточную функцию третьего и восьмого звеньев

(2.15)
,

(2.16)
.
Третье и восьмое звенья – апериодические звенья первого порядка.
Из уравнения (2.7) получим передаточную функцию шестого звена
(2.17)![]()
.
Шестое звено – идеальное усилительное звено.
Из уравнения (2.12) получим передаточную функцию седьмого и девятого звеньев
(2.18)![]()
![]() ,
,
![]()
(2.19)
Седьмое и девятое звенья – идеальное интегрирующее звено.
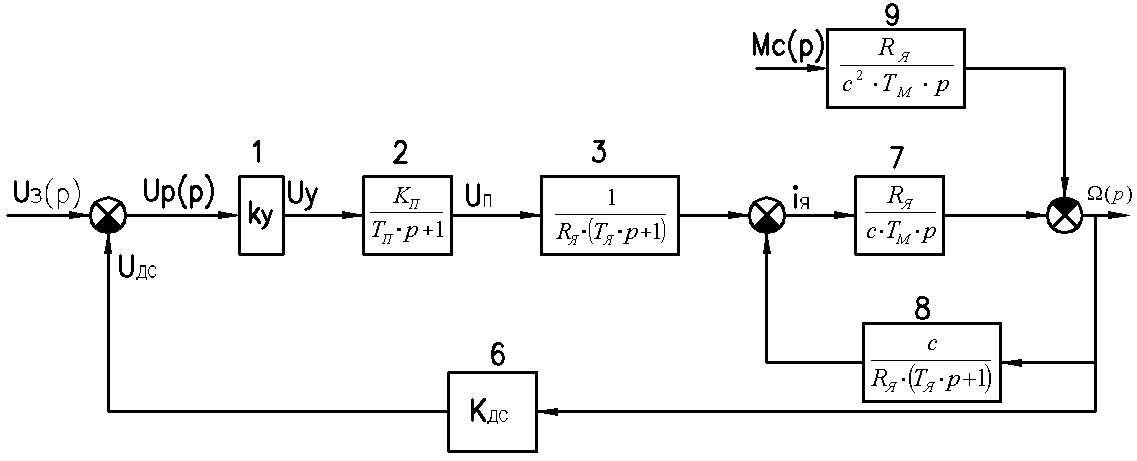
2.3. Структурная схема сар.
Используя полученные передаточные функции звеньев САР, составим структурную схему САР.
Рисунок 2.1 – Структурная схема
исследуемой САР.
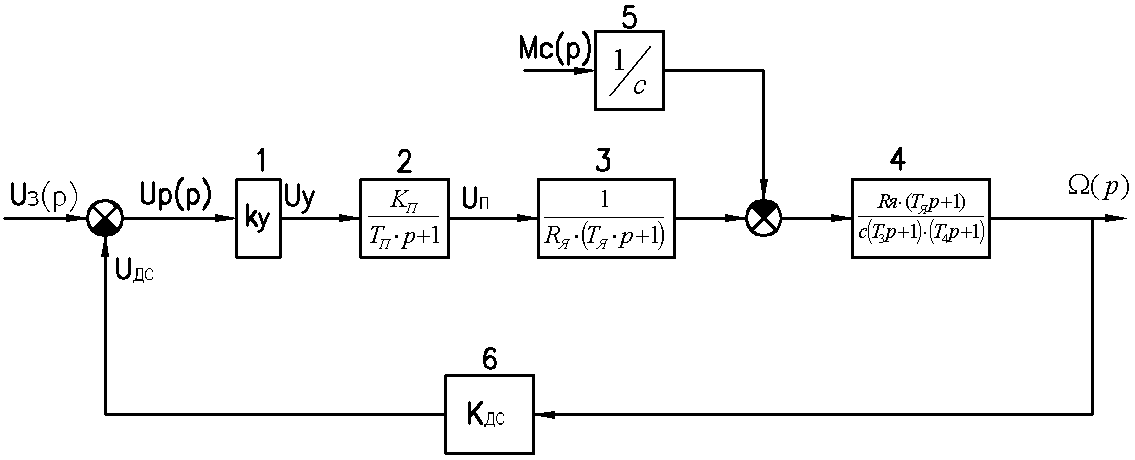
Преобразуем структурную схему САР (рисунок 2.1): заменяем встречно-параллельное соединение звеньев 7 и 8 одним звеном 4, и переносим сумматор влево через звено 7.
Передаточная функция 4-го звена:

(2.20)![]()
где
![]() с.
с.
![]() с.
с.
 Передаточная
функция 5-го звена:
Передаточная
функция 5-го звена:

(2.21)![]()
Рисунок 2.2 – Преобразованная структурная
схема исследуемой САР.
 3.
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ДВИГАТЕЛЯ ДЛЯ
УГЛОВОЙ СКОРОСТИ ПО НАПРЯЖЕНИЮ НА ЯКОРЕ
И ПО МОМЕНТУ СОПРОТИВЛЕНИЯ.
3.
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ ДВИГАТЕЛЯ ДЛЯ
УГЛОВОЙ СКОРОСТИ ПО НАПРЯЖЕНИЮ НА ЯКОРЕ
И ПО МОМЕНТУ СОПРОТИВЛЕНИЯ.
3.1. Передаточная функция двигателя для угловой скорости по напряжению на якоре.
Найдем передаточную функцию двигателя для угловой скорости по напряжению на якоре
 ,
,
 . (3.1)
. (3.1)
3.2. Передаточная функция двигателя для угловой скорости по моменту сопротивления.
Найдем передаточную функцию двигателя для угловой скорости по моменту сопротивления
 ,
,
 (3.2)
(3.2)
 4.
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ, ХАРАКТЕРИСТИЧЕСКИЕ
УРАВНЕНИЯ ЗАМКНУТОЙ И РАЗОМКНУТОЙ
СИСТЕМ, ОПЕРАТОРНЫЕ УРАВНЕНИЯ ДЛЯ
РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ И ОШИБКИ.
4.
ПЕРЕДАТОЧНЫЕ ФУНКЦИИ, ХАРАКТЕРИСТИЧЕСКИЕ
УРАВНЕНИЯ ЗАМКНУТОЙ И РАЗОМКНУТОЙ
СИСТЕМ, ОПЕРАТОРНЫЕ УРАВНЕНИЯ ДЛЯ
РЕГУЛИРУЕМОЙ ВЕЛИЧИНЫ И ОШИБКИ.
4.1. Передаточная функция разомкнутой системы.

Рисунок 4.1 – Структурная схема разомкнутой САР.
Передаточную функцию разомкнутой системы (петли, разомкнутой по цепи главной обратной связи) получим в виде
(4.1)
где К – коэффициент усиления разомкнутой системы;
![]() .
.
Характеристическое уравнение разомкнутой системы имеет вид
![]() . (4.2)
. (4.2)
4.2. Передаточная функция замкнутой системы для регулируемой величины Ω по задающему напряжению UЗ при моменте сопротивления MC =0.
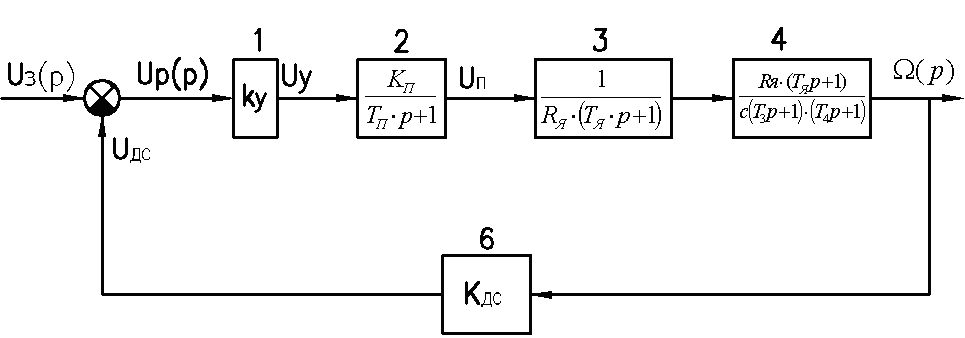
Рисунок 4.2 – Структурная схема замкнутой системы для регулируемой величины Ω
по задающему напряжению UЗ.
 Найдем
передаточную функцию замкнутой системы
для регулируемой величины Ω
по задающему напряжению UЗ
Найдем
передаточную функцию замкнутой системы
для регулируемой величины Ω
по задающему напряжению UЗ

(4.3)
Характеристическое уравнение замкнутой системы имеет вид
(4.4)![]()
.
4.3. Передаточная функция замкнутой системы для регулируемой величины Ω по моменту сопротивления MC при задающем напряжении UЗ=0.
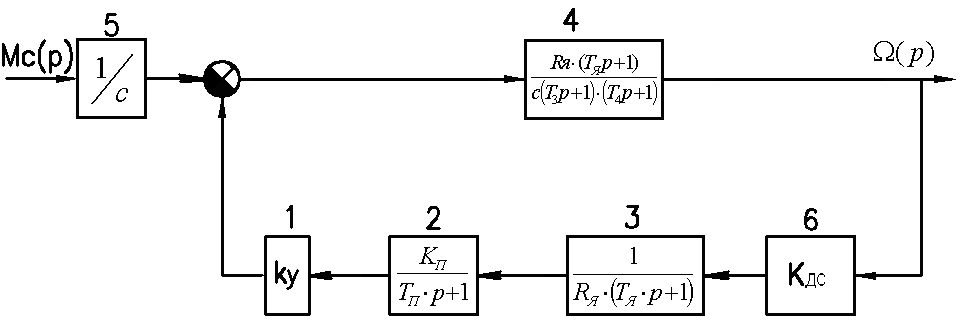
Рисунок 4.3 – Структурная схема замкнутой системы для регулируемой величины Ω
по моменту сопротивления MC .
Найдем передаточную функцию замкнутой системы для регулируемой величины Ω по моменту сопротивления MC
(4.5)
.
 4.4.
Передаточная функция замкнутой системы
для ошибки UP
по задающему напряжению UЗ
при моменте сопротивления MC
=0.
4.4.
Передаточная функция замкнутой системы
для ошибки UP
по задающему напряжению UЗ
при моменте сопротивления MC
=0.
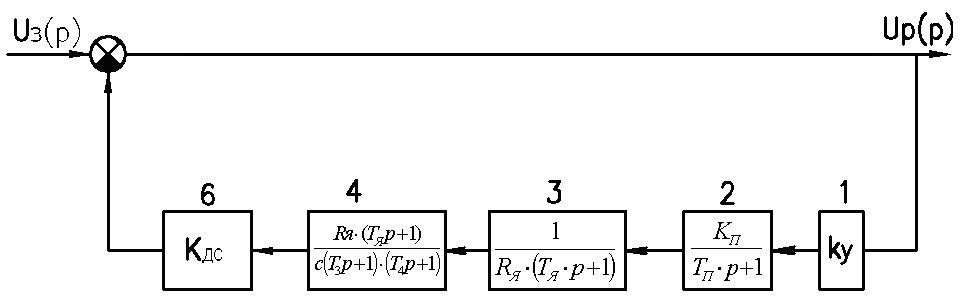
Рисунок 4.4 – Структурная схема замкнутой системы для ошибки UP по задающему
напряжению UЗ.
Найдем передаточную функцию замкнутой системы для ошибки UP по задающему
напряжению UЗ
(4.6)![]()
.
4.5. Передаточная функция замкнутой системы для ошибки UP по моменту сопротивления MC при задающем напряжении UЗ=0.
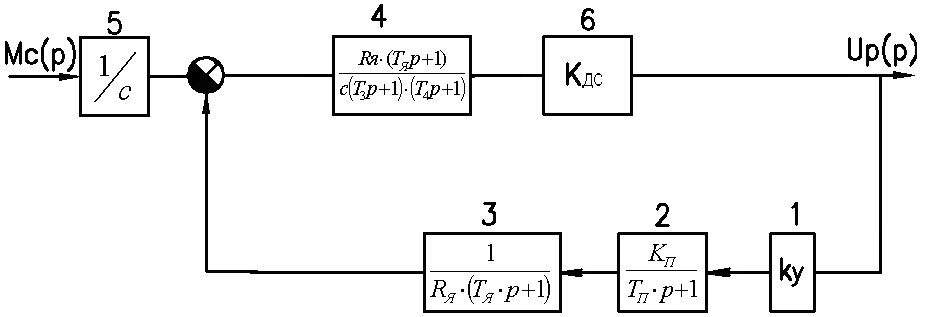
Рисунок 4.5 – Структурная схема замкнутой системы для ошибки UP по моменту
сопротивления MC.
Найдем передаточную функцию замкнутой системы для ошибки UP по моменту сопротивления MC.

(4.7)
.