

Общая постановка задачи оптимального управления.
В фазовом пространстве даны x0 и x1. Среди всех допустимых управлений u=u(t), переводящих фазовую точку из x0 в x1, найти такое (если оно существует), для которого функционал:
 (8)
(8)
принимает наименьшее возможное значение. Здесь x(t) – решение системы (5) ДУ с начальным условием x(t0) = x0, с соответствующим управлением u(t); t1 – момент прохождения траектории через точку x1; функция f0 – подынтегральная функция, определена и непрерывна вместе с частными производными на всем пространстве
 *
,
где
– область
допустимых управлений, а
– фазовое
пространство.
*
,
где
– область
допустимых управлений, а
– фазовое
пространство.
Заметим,
что все fi,
i=1,2,…,n
и
все
![]() непрерывны,
а система (5) ДУ автономна, т.е. правая
часть явно не зависит от времени.
непрерывны,
а система (5) ДУ автономна, т.е. правая
часть явно не зависит от времени.
Система (5) неавтономна, а функционал имеет вид:
 .
(9)
.
(9)
Определение: задан функционал (9), если в каждой функции x(t) (кривой) из некоторого класса функций поставлено в соответствие некоторое число
 (10)
(10)
или функционал имеет вид:

где t0≤t≤t1, то 1) t0 и t1 могут быть заданы. И время перехода есть t1-t0.
2) t1 может быть не задано, а определено из условия прохождения фазовой точки x(t) по траектории через заданную точку x1, т.е. x(t)=x1, откуда и “вытекает” t1 и x(t) – решение системы (5).
При этом t1 находится из:
 x1(t)=x11
x1(t)=x11
x2(t)=x12
……………..
xn(t)=x1n . (11)
Важным частным случаем общей задачи оптимального управления является случай, когда f0(x,u)≡1 в (8).
Тогда (8) имеет вид:
 (12)
(12)
Билет №4 (Сопряженная система. Гамильтониан)
Принцип оптимальности Понтрягина.
Для формулировки необходимого условия оптимальности удобно дать иную формулировку задачи оптимального управления.
Добавим к фазовым координатам x1, x2, …, xn, меняющимся по закону (11) еще одну координату x0, закон изменения которой имеет вид:
![]() ,
(13)
,
(13)
где f0 – подынтегральная функция из (8). Тогда будем рассматривать новую систему ДУ:
![]() (14)
(14)
Или в векторном виде:

![]() (15)
(15)
где
 = {x0,
x},
размерностью
n+1,
а
= {x0,
x},
размерностью
n+1,
а
 = {f0,f}
– вектор правых частей ДУ.
= {f0,f}
– вектор правых частей ДУ.
Геометрическая интерпретация (рис.6).
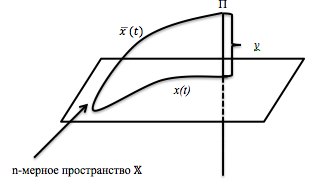
Рис.6
Переходим к формулировке теоремы Понтрягина, дающей решение основной общей задаче оптимального управления.
Рассмотрим еще одну систему относительно вспомогательных (сопряженных) ψ0,ψ1,…,ψn:
![]() (16)
(16)
где f2 взято из (14).
Это система n+1 линейных ДУ относительно n+1 переменных с постоянными коэффициентами. Вводим вектор сопряженных переменных ψ={ψ0,ψ1,…,ψn}. Тогда имеем:
![]() (17)
(17)
где
![]() –
матрица производных функции
–
матрица производных функции
 .
.
Если
выбрано некоторое допустимое управление
u(t),
t0≤t≤t1,
то
имеем соответствующую фазовую траекторию
 (t)
системы
(14) с начальным условием
(t0)={0,x0},
а
система (16) имеет вид:
(t)
системы
(14) с начальным условием
(t0)={0,x0},
а
система (16) имеет вид:
(18)
и эта система ДУ является однородной, поэтому при любых начальных значениях (условиях) ψi допускает единственное решение.
Как и решение (t), решение системы (18) состоит из непрерывных функций ψi(t),
имеющих всюду непрерывные производные по t.
Объединим системы (18) и (14). Для этого введем гамильтонову функцию (гамильтониан) H(x1,x2,…,xn,u1,u2,…ur):
![]() (19)
(19)
либо в виде гамильтоновой системы:

 (20)
(20)
Взяв произвольно допустимые (т.е. кусочно-непрерывные) управления u(t), t0≤t≤t1 и начальные условия (t0)= 0, мы можем найти соответствующую траекторию
(t)
= {x0(t),x1(t),…xn(t)}.
После
этого мы можем находить вектор-функцию
 (t)
= {ψ0(t),ψ1(t),…ψn(t)},
соответствующую
(t)
и
u(t).
(t)
= {ψ0(t),ψ1(t),…ψn(t)},
соответствующую
(t)
и
u(t).
При
фиксированных постоянных значениях
и
,
функция
гамильтониана H
становится
функцией параметра u
(u ).
).
Точную верхнюю грань этой функции мы обозначим через M( , x):
M( , x) = sup H( , x, u). (21)
Точная верхняя грань функции – наименьшее решение из верхних граней, для которого значение функции на заданном интервале будет меньше (11). Если точная верхняя грань значений непрерывной функции H достигается в некоторой области , то M( , x) – есть максимум функции H при фиксированных переменных и .