

Билет №1 (Управляемые объекты. Фазовые траектории. Процесс управления)
Понятие об управляемых объектах.
Рассмотрим, например, прямолинейное движение автомобиля. В каждый момент времени состояние автомобиля характеризуется двумя числами: путь S, скорость V. Две эти величины меняются в зависимости от времени t, но не самопроизвольно, а сообразно воле водителя, управляющего работой двигателя, увеличивая или уменьшая развиваемую двигателем силу F.
Схема управляемого объекта (рис. 1):
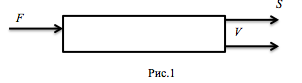
Величины S и V, характеризующие состояние объекта – фазовые координаты, величина F – управляющий параметр.
Если рассматривать движение автомобиля не на прямой, а на плоскости, то фазовых координат будет 4 (2 географические компоненты и 2 компоненты скорости), а управляющих параметров будет 2: мощность двигателя (сила тяги) и угол поворота руля.
У летящего самолета можно рассматривать 6 фазовых координат: 3 географические компоненты и 3 компоненты скорости Vx, Vy, Vz; несколько управляющих параметров: F и φ – величины, характеризующие положение рулей высоты и направления и тягу двигателя.
В электрическом утюге с терморегулятором фазовыми координатами будут сила тока и температура нагрева, а управляющим параметром – положение регулятора.
Таким образом, мы имеем следующее математическое описание управляющего объекта: состояние объекта задается в каждый момент времени числами x1, x2, …, xn, которые называются фазовыми координатами. Движение объекта, с математической точки зрения, заключается в том, что его состояние изменяется с течением времени (x1, x2, …, xn – переменные величины). Движение объекта происходит не самопроизвольно: объектом можно управлять “рулями”, положение которых характеризуется в каждый момент времени r числами: u1, u2, …, ur. Эти числа – управляющие параметры. “Рулями” можно манипулировать – по своему желанию изменять u1, u2, …, ur с течением времени (функция времени).
Предположим, что, зная фазовое состояние объекта в t0 и выбрав управляющие функции u1(t), u2(t), …, ur(t), мы сможем математически точно рассчитать поведение объекта для любых t>t0 и найти x1(t), x2(t), …, xn(t), характеризующие изменение фазовых координат с течением времени.
Схема объекта в теории автоматического управления (ТАУ) (рис.2):
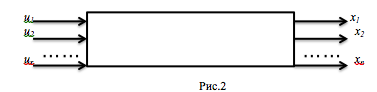
u1, u2, …, ur – входные переменные, x1, x2, …, xn – выходные переменные в ТАУ.
Величины {ur} удобно считать координатами некоторого вектора u, который будет называться управляющим вектором. Введем n-мерный вектор x = { x1, x2, …, xn }, заданный в n-мерном пространстве. Это n-мерное пространство, в котором в виде точек изображаются фазовые состояния объекта, называется фазовым пространством.
Чтобы полностью задать движение объекта надо задать его начальное фазовое состояние в t0 и выбрать управляющие функции u1(t), u2(t), …, ur(t), t≥t0, т.е. выбрать вектор-функцию u(t) = { u1(t), u2(t), …, ur(t) }. Задав все эти параметры, мы однозначно определяем дальнейшее движение. Оно заключается в том, что фазовая точка x(t) для t>t0 с течением времени перемещается в фазовом пространстве и описывает некоторую линию-траекторию (рис.3).
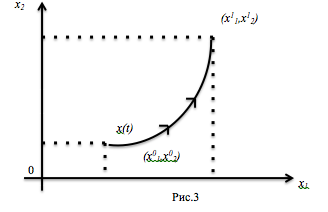
Пара вектор-функций x(t) и u(t) – процесс управления (или просто - процесс).