

Синхронизация импульсами отсчетов Sample Clock (без усреднения)
Такой вариант хорош для низких частот. Здесь используется 1-й канал счетчика.
Обратите внимание на то, что сколько бы периодов (много или мало) не уложились между импульсами отсчетов Sample Clock, но т.к. усреднение отключено – в памяти сохранится только результат измерения последнего периода.
Такой метод измерений реализуется вариантом Counter Input»Frequency в DAQmx Create Virtual Channel VI, вариантом Sample Clock в DAQmx Timing VI при установке значения False в свойстве EneblaAvareging узла свойств DAQmx Channel Property Node.
Синхронизация импульсами отсчетов Sample Clock (с усреднением)
Такой вариант хорош для измерения высоких частот, а также частот изменяющихся в широком диапазоне. Здесь используется 1-й канал счетчика.
Когда включен этот режим (узел свойств) каждый импульс отсчетов фиксирует в памяти и количество периодов, вместившихся между импульсами отсчетов, и результат измерения длительности полных периодов. На основе этих результатов измерений DAQmx вычисляет среднее значение частоты.
Такой метод измерений реализуется вариантом Counter Input»Frequency в DAQmx Create Virtual Channel VI, вариантом Sample Clock в DAQmx Timing VI при установке значения True в свойстве EneblaAvareging узла свойств DAQmx Channel Property Node.
F. Измерение перемещений
Квадратурный энкодер – популярный датчик, используемый в таймерных приложениях. Квадратурный энкодер служит для измерения перемещения (положения), преобразуя вращательное движение в непосредственно измеряемый электрический сигнал. Квадратурные энкодеры поддерживаются DAQ-устройствами, в которых используются микросхемы NI-TIO, NI-STC2 и NI-STC3.
Как работает энкодер
Энкодер – это датчик, который дает возможность измерять положение или расстояние. Чтобы разобраться, как работает энкодер, рассмотрим рис. 6-20.
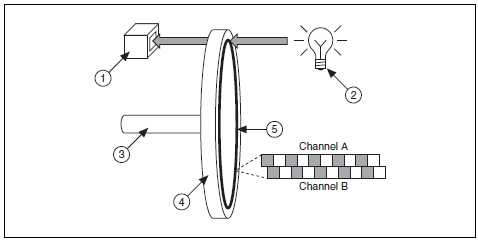
Рисунок 6-20. Квадратурный энкодер
1 – датчик света, 2 – источник света, 3 – вал, 4 – вращающийся диск, 5 – кодовая дорожка, Channel - канал
Квадратурный энкодер преобразует вращательное движение в непосредственно измеряемый электрический сигнал. Интересующее вас вращательное движение – это вращение вала. Для вас может представлять интерес направление вращения, скорость вращения, или и то, и другое. На валу закреплен диск, который вращается в том же направлении и с той же скоростью, что и вал. Вращающийся диск помещается между источником света и датчиком света. На диске есть последовательность чередующихся непрозрачных и прозрачных областей, называемая кодовой дорожкой. Непрозрачные области препятствуют прохождению света от источника к датчику, а прозрачные области пропускают свет. Кодовая дорожка состоит из двух колец, состоящих из чередующихся прозрачных и непрозрачных областей. Каждое кольцо формирует последовательность импульсов. Кольца смещены друг относительно друга, так что в зависимости от направления вращения диска импульсы одной из последовательностей опережают другую. Количество прозрачных и непрозрачных участков определяют количество импульсов, формируемых при полном обороте диска. Эта характеристика очень важна, если вы контролируете количество полных оборотов вала.
Квадратурный энкодер
Большинство энкодеров выдают ТТЛ-совместимый сигнал, который можно подавать на счетчик. Как вы видели ранее, квадратурный энкодер формирует две последовательности импульсов, одна из которых соответствует каналу A (Channel A), а другая – каналу B (Channel B). Эти последовательности всегда сдвинуты друг относительно друга по фазе на 90 (рис. 6-21). Ведущий канал определяется направлением вращения. Если энкодер вращается по часовой стрелке, канал A является ведущим по отношению канала B. Если энкодер вращается против часовой стрелки, то наоборот, канал B является ведущим по отношению к каналу A.
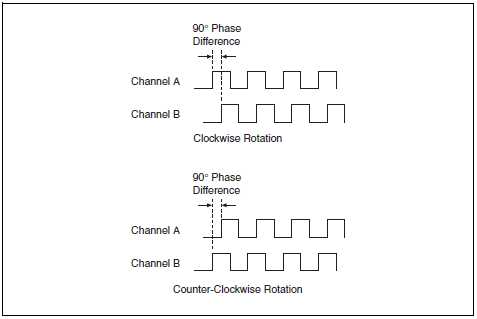
Рисунок 6-21. Сигналы с квадратурного энкодера
|
Примечание: Бывает, что некоторые энкодеры выдают сигналы, не совместимые со счетчиком. Например, некоторые энкодеры формируют дифференциальный сигнал, а микросхемы счетчика для DAQ-устройств производства NI не поддерживают дифференциальные входы. Если сигнал, генерируемый энкодером, не совместим с используемой вами микросхемой, то необходимо применить согласование сигнала, прежде чем посылать его на счетчик. |
Декодирование сигналов с квадратурных энкодеров
Счетчики большинства DAQ-устройств поддерживают три типа декодирования сигналов с квадратурных энкодеров: X1, X2 и X4. В случае варианта X1, если сигнал A является ведущим по отношению к сигналу B, счетчик инкрементируется по нарастающему фронту сигнала A. Если ведущим является сигнал B по отношению к сигналу A, то счетчик декрементируется по ниспадающему фронту сигнала A.
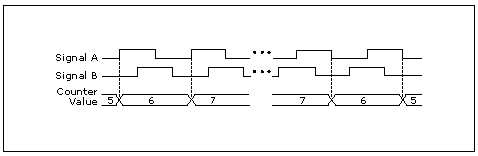
Рисунок 6-22. Декодирование X1
При декодировании X2 счетчик работает так же, как и в случае варианта X1, только инкрементирование и декрементирование счетчика происходит как по нарастающему, так и по ниспадающему фронту сигнала A.
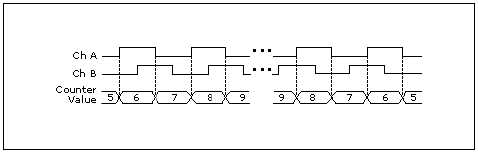
Рисунок 6-23. Декодирование X2
Аналогично, в случае декодирования X4, счетчик инкрементируется и декрементируется и по нарастающему, и по ниспадающему фронту обоих сигналов A и B. Вариант X4 обладает более высокой чувствительностью измерения перемещения, но, скорее всего, измерение с его помощью будет выполнено некорректно, если в энкодере имеет место вибрация.
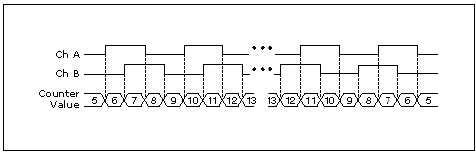
Рисунок 6-24. Декодирование X4
Для выбора типа декодирования с помощью DAQmx в LabVIEW, следует воспользоваться входом Decoding Type в вариантах Counter Input»Position»Linear Encoder или Counter Input»Position»Angular Encoder функции создания виртуального канала DAQmx Create Virtual Channel VI.
Z-индексация
Многие энкодеры формируют третий сигнал для Z-индексации, который представляет собой импульс, выдаваемый в определенных положениях, которые вы можете использовать для точного определения опорного положения. Например, если для углового энкодера Z-индекс равен 45, то энкодер посылает импульс на терминал Z каждый раз, как энкодер проходит отметку 45.
Поведение сигнала Z различается в зависимости от модификации энкодера. Чтобы определить временные параметры сигнала Z относительно сигналов A и B, обратитесь к документации на энкодер. В DAQmx можно конфигурировать Z-индексацию с помощью свойства Z Index Phase.
Чтобы реализовать Z-индексацию с помощью DAQmx в LabVIEW, установите на входе Z Index Enable значение True для варианта Counter Input»Position»Linear Encoder или Counter Input»Position»Angular Encoder в DAQmx Create Virtual Channel VI. Вход Z Index Phase используйте для того, чтобы задать состояние (с учетом единиц измерения), в которых должны быть сигналы A и B при сбросе результата измерений высоким уровнем сигнала Z. Вход Z index value определяет (в единицах измерения) значение, в которое сбрасывается результат измерения при высоком уровне сигнала Z, и при значениях сигналов А и В, заданных фазой индекса Z.
Выводы
Счетчик принимают и генерируют ТТЛ сигналы.
Основные компоненты: входы Source и Gate, выход Out и счетный регистр.
В DAQ-устройства производства NI может быть установлена одна из трех различных микросхем счетчиков:
NI-STC 2 (32 разряда) – устройства M серии
NI-TIO (32 разряда) – устройства семейства 660x
NI-STC 3 (32 разряда) – устройства Х серии
С помощью Easy Counter VI можно выполнять счет фронтов, генерацию импульсов, измерение параметров импульсов и измерение частоты.
Квадратурный энкодер – это измерительный преобразователь, который преобразует вращательное движение в две последовательности импульсов, сдвинутые друг относительно друга на 90.
Самопроверка: короткий тест
Какие из перечисленных компонентов входят в состав счетчика?
Вход Source
Вход Gate
Мультиплексор
Регистр
Выход Out
Чему равно последнее значение 24-битового счетчика, перед тем, как он перейдет в состояние 0?
Какая ошибка имеет место, когда значение частоты измеряемой способом Low Frequency with 1 Counter, приближается к опорной частоте DAQ-устройства?
Самопроверка: ответы
Какие из перечисленных компонентов входят в состав счетчика?
Вход Source
Вход Gate
Мультиплексор
Регистр
Выход Out
Чему равно последнее значение 24-битового счетчика, перед тем, как он перейдет в состояние 0?
2^24 – 1 = 16777216 – 1 = 16777215
Какая ошибка имеет место, когда значение частоты измеряемой способом Low Frequency with 1 Counter, приближается к опорной частоте DAQ-устройства?
Погрешность квантования
Заметки
7
7. Согласование сигналов
В этой лекции дается представление о том, каким образом в измерительных системах применяется согласование (согласование) сигналов для точного измерения многих физических величин. Здесь же описываются методы согласования, которые повышают качество сигналов.
Темы
Общие сведения о согласовании сигналов
Системы согласования сигналов
Согласование сигналов при измерении напряжения
Измерение температуры
Измерение деформации, давления, нагрузки и крутящего момента
Измерение параметров звука и вибраций